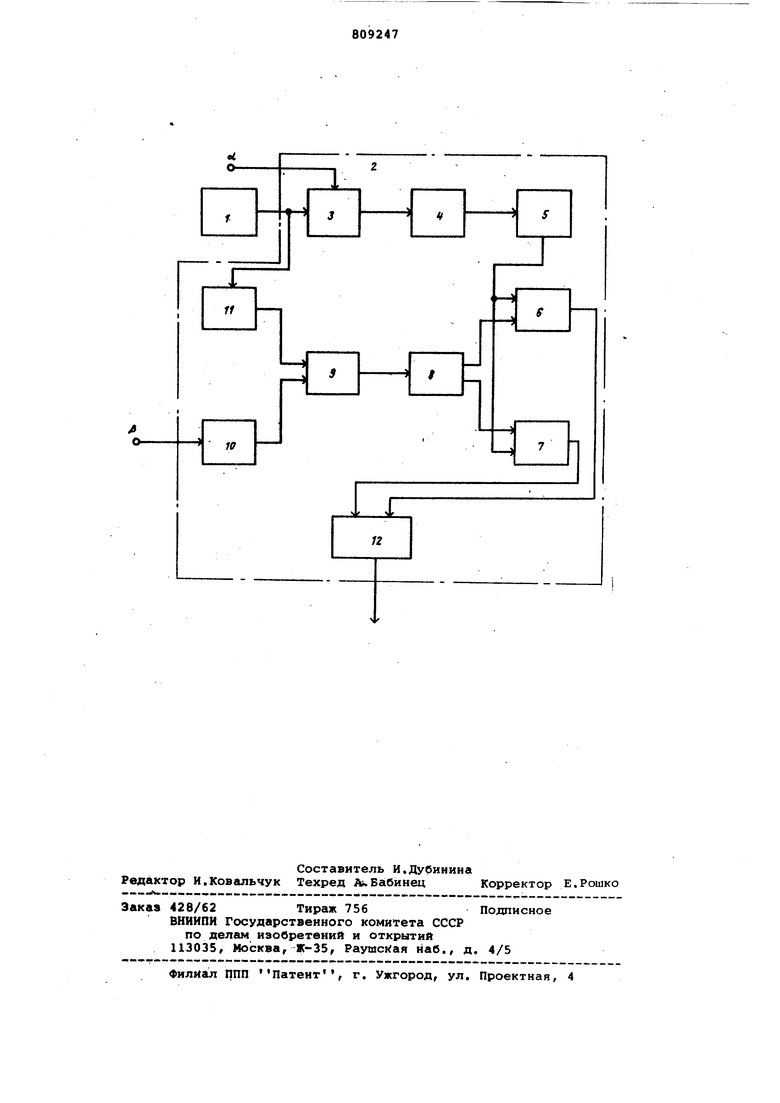
Изобретение относится к аналогоцифровым системам счисления и предназначено для моделирования судового гирокомпаса. Известно устройство для имитации выходных сигналов гироинерциальной системы, содержащее решающий блок, раскладчик вектора путевой скорости, интегратор угла ухода гироплатформы, сумматор, синусо-косинусный трансфор матор, блок формирования текущей широты и блок формирования тангенциальной зависимости l . Однако такое устройство имеет невысокое быстродействие и недостаточную точность моделирования. Наиболее близким по технической сущности к изобретению является устройство для моделирования выходных сигналов гирокомпаса, содержащее бло установки периода колебаний, блок дифференцирования, блок интегрирования, регистр и блок формирования вре мени колебаний В этом устройстве исчисление курса и формирование колебаний чувствительного элемента ведется по разным каналам, что приводит к усложнению схемы и скачкообразному изменению вы ходного сигнала, т.е. к понижению точности, к тому же данное устройство не обеспечивает плавной регулировки амплитуды и частоты колебаний чувствительного элемента. Цель изобретения - повышение точности и упрощение устройства. Поставленная цель достигается тем, что устройство для моделирования выходных сигналов судового гирокомпа-. са, содержащее реверсивный счетчик и блок интегрирования, состоящий из сумматоров и элементов И, содержит генератор синусоидальных колебаний, а в блок интегрирования введены преобразователь напряжения в частоту, двухполупериодный выпрямитель, поро говый элемент и нуль-органы, выход первого из которых соединен с первьм входом первого сумматора, выход которого подключен к входу второго нульоргана, выходы которого соединены с первыми входами первого и второго элементов И, выходы которых подклю-. чены к входам реверсивного счетчика, выход которого является выходом устройства, выход генератора синусоидальных колебаний соединен с входом первого нуль-органа и с первым входом второго сумматора, выход которого через двухполупериодный выпрямитель подключей к входу преобразователя напря жения в частоту, выход которого соединен со вторыми входами элементов И, выход порогового элемента подключен к второму входу первого сумматора, второй вход второго сумматора является входом задания угловой скорости разворота чувствительного элемента гирокомпаса устройства, вход порогового элемента является входом задания угла перекладки руля устройс ва. На чертеже представлена функциональная схема устройства. Устройство для моделирования судо вого гирокомпаса содержит генератор 1 синусоидального напряжения, выход которого соединен с блоком 2 интегри рования, содержащим второй сумматор 3, на один вход которого поступает величина угловой скорости разворота чувствительного элемента гирокомпаса f а другой вход соединен с выходом генератора 1 синусоидального напряже ния. С сумматором 3 последовательно соединены двухполупериодный выпрямитель 4 и преобразователь 5 напряжения в частоту выход которого подключен к первым входам элементов И 6,7, а вторые входы через второй нуль-орг 8соединены с выходом первого сумматора 9. Один вход первого сумматора 9подключен к выходу порогового элемента 10, на вход которого поступает величина угла перекладки руля (i , другой вход первого сумматора 9 чере первый нуль-орган 11 подключен ко входу сумматора 3. Выходы элементов И 6,7 подсоединены к реверсивному счетчику 12, выход которого является выходом устройства. Устройство работает следующим образом. Генератор 1 синусоидального напряжения вырабатывает напряжение синусоидальной формы, амплитуда и пе риод которого могут регулироваться при постановке условий згшачи. Это синусоидальное напряжение поступает на вход сумматора 3, где оно склады вается с напряжением, пропорциональ ным по величине угловой скорости ра ворота чувствительногоэлемента гирокомпаса i , поступающего на другой вход сумматора 3. Суммарный сиг нал с выхода сумматора 3 поступает вход двухполупериодногр выпрямителя 4, с выхода которого снимается напр жение одного знака, равное по величине абсолютному значению суммарног сигнала. Таким образом, напряжение на выходе двухполупериодного выпрямителя равно и , /«. ± А sirwDt/ , где А - амплитуда синусоидального напряжения, ш t - величина, определяющая период синусоидальных коле баний. Напряжение с выхода двухполупериодного выпрямителя поступает на вход преобразователя 5 напряжения в частоту, с выхода которого снимается последовательность прямоугольных импульсов следующих с частотой, пропорциональной напряжению на выходе преобразователя 5 напряжения в частоту. Последовательность прямоугольных импульсов поступает параллельно с выхода преобразователя напряжения в частоту на входы элементов И 6,7, на другие входы которых поступает с выходов нуль-органа 8 управляющие сигналы, которые разрешают прохождение импульсов на суммирующий или вычитаючий входы реверсивного счетчика 12. Последовательность импульсов меняет состояние реверсивного счетчика со скоростью пропорциональной сумме угловой скорости разворота чувствительного элемента и синусоидального напряжения, а цифровой код на выходе реверсивного счетчика соответствует исчисляемой величине угла разворота чувствительного элемента гирокомпаса t К S (db+ А sin«)t)dt. где К - выходная величина, пропорциональная углу разворота чувствительного элемента гирокомпаса. Реверсивный счетчик работает в кольцевом режиме, цифровой код максимального значения курса на выходе счетчика соответствует 359,9, после чего он переходит в состояние 000,0° при поступлении очередного счетного импульса на вход сложения счетчик из состояния 000,0° переходит в состояние 359,9)при поступлении счетного импульса на вход вычитания счетчик переходит из состояния 000,0°в состояние 3 5 9;9°. Управление работой элементов И 6, 7 происходит следующим образом. На вход порогового элемента 10 поступает напряжение, пропорциональное по величине и соответствующее по знаку углу перекладки руля (Ь , С выхода порогового элемента 10 снимается нулевое напряжение, если угол перекладки руля равен нулю. При отклонении руля от нулевого положения, выход порогового элемента 10 переходит в состояние (+) или (-), в зависимости от направления перекладки руля. Сигнал с выхода порогового элемента поступает на один из входов сумматора 9, на другой вход которого поступает положительный или отрицательный сигнал с нуль-органа 11, подключенного к входу cyNwaTopa 3. При этом выходное напряжение порогового элемента в К раз больше, чем выходное напряжение нуль-органа 11. в момент равенства нулю угла перекладки руля с выхода первого сумматора 9 снимается напряжение прямоугольной формы,симметричное относительно нуля, меняющее свой знак скачкообразно с частотой, соответствующей частоте синусоидального напряжения генерируемого генератором синусоидального напряжения. При перекладке руля сигнал с выхода порогового элемента 10 суммируется с вы ходным сигналом нуль-органа 11 и с выхода сумматора 9 снимается напря-жение, пропорциональное сумме посто ной составляющей порогового элемент |12 и напряжения прямоугольной формы нуль-органа 11, Второй нуль-орган 8,подключенный к выходу сумматора 9,в зависимости от знака напряжени поступающего на его вход, разрешает работу одного из элементов И 6,7 и запрещает работу другого элемента. Таким образом, при d О реверсивный счетчик 12 поочередно меняет режим вычитания и суммирования с частотой задаваемой генератором синусоидально го напряжения, а частота импульсов, поступающих на входы реверсивного счетчика 12 изменяется по синусоидал ному закону и зависит только от амплитуды синусоидального напряжения, снимаемого с генератора синусоидаль ного напряжения, В зависимости от направления перекладки руля счетчик переходит в режим суммирования или вычитания, а частота импульсов, поступающих на вход счетчика зависит от суммарного напряжения Asinu Благодаря введенным блокам и связям повышается точность и упрощается схема устройства. Формула изобретения Устройство для моделирования выходных сигналов судового гирокомпаса, содержгицее реверсивный счетчик . и блок интегрирования, состоящий из сумматоров и элементов И, отличающееся тем, что, с целью повышения точиости и упрощения устройства, оно содержит генератор синусоидальных колебаний, а в блок интегрирования введены преобразователь напряжения в частоту, двухполупериодный выпрямитель, пороговый элемент и нуль-органы, выход первого из которых соединен с.первым входом первого сумматора, выход которого подключен к входу второго нульоргана, выходы которого соединейы с первыми входами первого и второго элe 4eнтoв И, выходы которых подклюг чены к входсш реверсивного сметчика, ;зыход которого является выходом устройства, выход генератора синусоидальных колебанийсоединен с входом первого нуль-органа и с первым входом второго сумматора, выход которого через двухполупериодный выпрямитель подключен к входу преобразователя напряжения в частоту, выход которого соединен со вторыми входгши элементов И, выход порогового элемента подключен к второму входу первого сумматора, второй вход второго сумматора является входом задания угловой скорости разворота чувствительного элемента гирокомпаса устройства, вход порогового элемента, является входом задания угла перекладки руля -устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР I 371593, кл, G Об G 7/66, 1970, 2.Авторское свидетельство СССР № 579638, кл. G 06 G 7/78, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
| Устройство для частотного преобразования импульсных сигналов | 1977 |
|
SU692072A1 |
| Устройство радиоимпульсной автоматической подстройки частоты | 1981 |
|
SU1146799A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU957245A1 |
| ЦИФРОВОЙ АНАЛИЗАТОР ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЛИНЕЙНОГО ЧЕТЫРЕХПОЛЮСНИКА | 1968 |
|
SU221785A1 |
| Судовой цифровой аксиометр | 1979 |
|
SU977279A2 |
| Устройство для управления преобразователем | 1985 |
|
SU1246300A1 |
| РЕЛЕ ТОКА | 2014 |
|
RU2563959C1 |