(54) СУДОВОЙ ЦИФРОВОЙ АКСИСйШТР
Изобретение относится к судостроению, в частности к судовым цифровым аксиометрам.
По основному авт.св. № 921965 известен судовой цифровой аксиометр, содержащий генератор импульсов, делитель,- первый, второй и третий формирователи, датчик положения пера руля, измеритель модуля угла перекладки руля, первый, второй и третий элементы И, счетчик модуля угла, регистр модуля угла, определитель борта, включсшадий схему определения приоритета и регистр борта, дайифратор, цифровой и стрелочные индикаторы, таймер, распределительный блок, триггер управления, реверсивный счетчик, дешифратор нуля, регистр прира1г|ения модуля угла, дополнительный регистр модуля угла, управляемый делитель, первый и второй дополнительные регисгистры борта,блок сравнения,при этом выход генератора импульсов через.последовательно включенные первый элемент И,счетчик модуля угла и регистр модуля угла соединен с внешним выходом аксиометра,а через последовательно включенные делитель, первый формироратель, датчик и второй формирователь - с первым входом измерителя модуля перекладки руля, второй вход которого соединен с вторым выходом первого формирователя, первый выход измерителя модуля угла перекладки руля соединен с вторым входом первого элемента И, второй выход - с вторым входом счетчика модуля углами первым входом схемы определения приоритета, третий выход - с вторым шхол
10 дом регистра модуля угла и первый входом регистра борта, четвертый выход - с вторым входом схемы определения приоритета, выходы которой че-. рез регистр борта с внешними выхода15ми аксирметра.
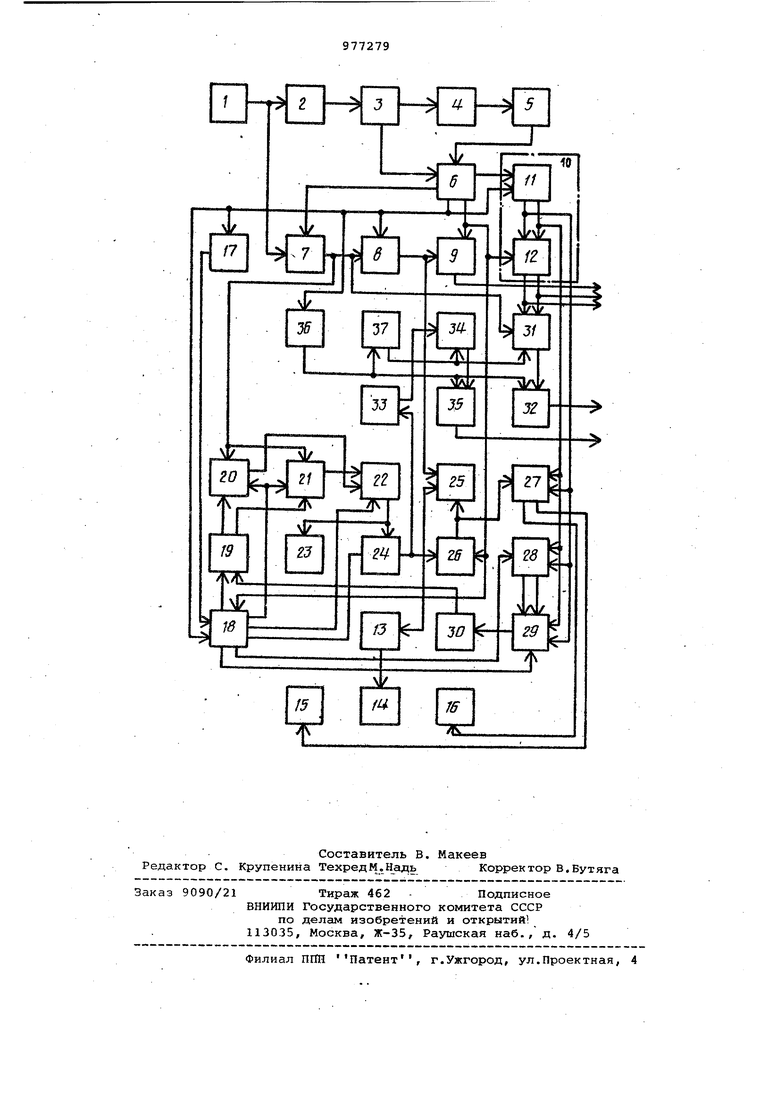
Кроме того, выход дешифратора соединен с входом цифрового индикатора. а первый вход распределительного блока соединен с вторым выходом из20мерителя модуля угла перекладки руля и входом таймера, второй вход распределительного блока - с выходом таймера, 1 ретий вход - с третим выходом измерителя модуля угла пере25кладки руля и первым входом управляемого делителя, а выходы распределительного блока соответственно соединены с первыми входами блока сравнения, второго дополнительного ре30гистра борта, регистра приращения модуля угла реверсивного счетчика, второго и третьего элементов И и первым установочным входом триггера управления, второй установочный вход которого соединен с выходом третьего формирователя, счетный вход триггера управления - с выходом дешифратора нуля, а прямой и инверсный выходы с вторыми входами соответственно второго и третьего элементов И, у кото1рых третьи входы соединены с выходом первого элемента И, а выходы - соответственно с вторым и третьим входами реверсивного счетчика, выход которого , в свою очередь, соединен с входом дешифратора нуля и вторым вкодом регистра приращения модуля угла, , у которого выход соединен с вторым входом управляемого делителя coJeдинe с первыми входами первого дополнител ного регистра борта и дополнительного регистра модуля угла, у которого второй соединен с выходом счет™ чика модуля угла, а выход - с дешиф ратором, кроме того, выход блока сравнения соединен с входом третьего формиро вателя а его второй и третий входы соединены с выходами второго дополнительного регистра борта, четвертЬгй и пятый входы блока сравнения соединены с выходами схемы определения приоритета и соответственно с вт рыми и третьими входами первого и вт рого дополнительных регистров борта, выходы первого дополнительного реги стра-борта соединены с входами crpeлочных индикаторов Ul, Известный судовой цифровой аксиометр позволяет вычислять и индицировать угол кладки руря, автоматизировать процесс выбора скорости вывода информации ни индикацию, однако не включает предварительную математичес кую обработку измеренных результатов что снижает его функциональные возможности. Цель изобретения - расширение функциональных возможностей аксиомет ра. Поставленная цель достигается тем что в судовой цифровой аксиометр вве дены сумматор число-импульсных.кодов регистр среднего значения угла, допо полнительный дешифратор нуля, счетчик числа кладок,регистр числа кладо дополнительный делитель, элемент за держки,при этом третий выход измери теля модуля угла перекладки руля через дополнительнЕЛй делитель соединен с входами регистров среднего эначеНия угла и числа кладок,а выход дополнительного делителя через элемент задержки соединен с первыми входами счетчика числа кладок и сумматора число-импульсных кодов,причем второй и третий выходы последнего совлинены с выходами регистра бдрта, а его четвертый вход соединен с выходом первого элементу И, при этом выход сумматорачисло-импульсных кодов через регистр среднего значе.ния угла соединен с выходом аксиометра, вход дополнительного дешифратора нуля соединен с выходом регистра приращения модуля угла, а его выход через счетчик числа кладок и регстр числа кладок соединен с выходом аксиометра. На чертеже представлена структурная схема судового цифрового аксиометра. Шход генератора 1 импульсов соединен через делитель 2 с входом первого формирователя 3, Первый выход первого формирователя 3 связан через датчик 4 положения пера руля и второй формирователь 5 с первым входом измерителя б модуля угла перекладки руля второй выход первого формирователя 3 непосредственно - с вторым входом измерителя б модуля угла перекладки руля. Выходы измерителя модуля угла перекладки руля соответственно соединены: первый - с вторым входом первого элемента И 7, первый вход которого соединен с выходом генератора 1, второй - с вторым входом счетчика 8 модуля угла, выход которого связан с входом регистра 9 модуля угла и первым входом входящей в блок 10 определителя борта схемы11 определения приоритета, третий с вторым входом регистра 9 модуля угла, первым входом регистра 12 борта, входящего в блок определителя борта, четвертый - с вторым входом схемы 11 определения приоритета. Выход счетчика 8 модуля угла соединен через регистр 9 модуля угла с внешним выходом аксиометра К через дешифратор 13 с входом цифрового индикатора 14. Кроме того, имеются стрелочные индикаторы 15 и 16. Второй выход измерителя 6 модуля угла перекладки руля связан также с входом таймера 17 и первым входом распределительного блока 18, с третьим входом которого связан третий выход измерителя модуля угла перекладки руля. Прямой и инверсный выходы триггера 19 управления соответственно соединены с вторыми входами второго и третьего элементов И 20 и 21, выходы которых соответственно соединены с вторым и третьим входами реверсивного счетчика 22. Выход реверсивного счетчика 22 через дешифратор 23 нуля соединен с счетным входом триггера 19 управления и с вторым входом регистра 24 приращения модуля угла. Первый вход дополнительного регистра 25 модуля угла соединен с выходом управляемого делителя 26, с которым также связан вход первого дополнительного.регистра 27 борта. Выход регистра 24 приращения модуля угла соединен с вторым входом управляемого делителя 26. В линию связи счетчика 8 модуля угла с дешифратором 13 включен дополни тел{ ный регист 25 модуля угла. Выход регистра 24 приращения моду ля угла соединен с вторым входом управляемого делителя 26, Выход первого элемента и 7 соедииен с первым входом счетчика 8 модуЛй угла и третьими входами второго 20 и третьего 21 элементов И, йлходы схеки 11 определения приор тета соединены соответственно с вторыми и третьими входами регистра 12 борта, первого и второго дополнитель ных регистров 27 и 28 борта и четвертым и пятым входами блока 29 срав нения. Выходы регистра 12 борта соединены с внешними выходами аксиометК UBM Выходы первого и допол нительного регистра 27 борта соедине на с входами стрелочных индикаторов 15 и 16. Выходы второго дополнительного регистра 28 борта соответствен но соединены с вторым и третьим вхог дами 0лока 29 сравнения. Выход бло.ка 29 сравнения через третий формирователь 30 соединен с вторым установочным входом триггера 19 управления, у которого первый установочный вход соединен с шестым выходом распределительного блока 18. Остальные выходы распределительного блока 18 соответственно соединены; первый - с первым входом блока 29 сравнения, второй - с первым входом дополнительного регитсра 28, третий- с первым входом регистра 24:приращения модуля угла, четвертый - с первым входом реверсивного счетчика 22, пятый - с первыми входами второго и третьего элементов И 20 и 21. Второй вхоЬ распределительного блока 18 соединен с выходом таймера 17. Кроме того, в судовой цифровой аксиометр входят сумматор 31 числоимпульсных кодов, регитр 32 среднего значения угла, дополнительный дешифратор 33 нуля, счетчик 34 числа кладок, регистр 35 -.чиопа кладок, до полнительный делитель 36, элемент 37 задёржки. Третий выход измерителя 6 модуля угла перекладки руля через дополнительный делитель 36 соедиенен с вхо дами регистра 32 среднего значения угла и регистра 35 числа кладок, кро ме того, выход дополнительного делителя 36 через элемент 37 задержки соединен с первыми входами счетчика ЗФ числа кладок и сумматора 31 число-импульсных кодов. Второй и третий входы сумматора чисую-импульсных кодов соединены с выходами регистра 12 борта, его четвертый вход соединен с выходом первого элемента И 7, а выход через регистр 32 среднего значения угла соединен выходом устройства. Вход дополнительного дешифратора нуля соединен с выходом регистра 24 приращения модуля угла 24, а его выход через счетчик 34 числа кладок и регистр 35 числа кладок соединен с выходом устройства. Аксиометр работает следующим образом, В блоке вычисления и борта перекладки руля, в который входят элементы 1-16 схекы, происходит преобразование угла поворота руля в цифровой код и его индикация с укаэани1вм борта перекладки руля. Елок автоматизации переключения частоты вывода параметра на индикацию, в который входят элементы 17 - 30 схемы , построен на принципе преЪбразования приращения параметра в частоту следования импульсов, причем приращение угла укладки руля вычисляется с учетом изменения направления его движения. Предлагаемая структурная реализация судового ци(й ового аксиометра позволяет, применив несложные дополнения, расширить его функциональные возможности: вычислить среднее значение угла кладок и число кладок за заданный временной интервал, что необходимо при ршиении задачи вычисления критериев качества управления судном. йячисление среднего значения угла кладок руля происходит следующим образом. Число-импульсные коды значений углов, с выходов первого элемента И 7 поступают на четвертый вход сумматора 31 число-импульсных кодов, причем суммирование осуществляется с Учетом борта, код которого поступает свыходов регистра 12 борта. Вычисление осуществляется по следукцему аналитическому выражению: где п - количество замеров. Для упрощения схемой реализации и количества межблочных связей коэффициент деления дополнительного делителя 36, определяющего период вычисления среднего значения, выбирается таким образом, что для получения среднего значения угла кладки руля достаточно отбросить младшие разряды суммы, т.е. число отсчетов за выбранный временной интервал кратно системе счисления, в которой получена сумма. Количество кладок руля вычисляется rio значению приращения на выходе регистра 24 приращения. Наличие приращения соответствует движению руля, а его отсутствие - окончанию перекладки. Таким образом, на выходе дополнительного дешифратора 33 нуля сигнал изменяется соответственно с кладками руля: при наличии кладки на выходе дешифратора - нулевой уровень при отсутствии - единичный уровень Количество переходов фиксируется в счетчике 34 числа кладок. Импульсом с выхода дополнительного делителя 36 вычисленные значения, числа кладок руля и срейние значения угла записываются в регистр 35 числа кладок и регистр 32 среднего значения угла, ,с выходов которых пос тупают на выход устройства для дальнейшей математической обработки. Затем сумматор 3i число-импульсных кодов и счетчик 34 числа кладок приводятся в исходное состояние перед следующим циклом : замера и.мпульсом, зггдержанным на элементе 37 задрежки. Ведение вычисления среднего.значения угла кладки руля и числа за заданный временной интервал непосред ственно в цифровом аксиометре позволяет получить технико-экономический эффект за счет сокращения времени, в течение которого необходимо занимать канал связи с UBM при вычислении указанных параметров, сократить машинное время на обработку данных, уменьшить загрузку центральной ЭВМ. Формула изобретения Судовой цифровой аксиометр по авт . св„ № 921965, отличающ и и с я тем, что, с целью расяаирения функциональных возможностей аксиометра, в него введены сумматор число-импульсных кодов, регистр среднего значения угла, дополнительный дешифратор нуля, счатчик числа кладок, регистр числа кладок, дополнительный делитель и элемент задержки, при этом третий выход иамерителя модуля угла перекладки руля через дополнительный делитель соединен с входами регистров среднего значения угла и числа кладок, а выход дополнительного делителя через элемент задержки соединен с первыми входами счетчика числа кладок и cyN$iaTOpa число-импульсных кодов, причем второй и третий входы последнего соединены с выходс1ми регистра борта, а его четвертый вход соединен с выходом первого элемента И, при этом выход сумматора число-импульсных кодов через регистр среднего значения угла соединен с выходом аксиометра, вход дополнительного дешифратора нуля соединен с выходом регистра приращения модуля угла, а его выхор через счетчик числа кладок и регистр числа кладок соединен с выходом аксиометра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 921965, кл. В 63 Н, 25/36, 10.07.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой цифровой аксиометр | 1978 |
|
SU921965A1 |
| Судовой цифровой аксионметр | 1977 |
|
SU918184A1 |
| БОРТОВОЙ АКСИОМЕТР ПЕРЕКЛАДКИ РУЛЯ | 1972 |
|
SU432041A1 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| Указатель положения руля | 1982 |
|
SU1041420A1 |
| Цифровой измеритель угловой скорости | 1988 |
|
SU1509741A1 |
| Устройство для оценки работы рулевого | 1985 |
|
SU1406627A1 |
| Автоматическая система управления силовым приводом судового руля | 1978 |
|
SU737291A2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |