Изобретение относится к автоматическому управлению курсом судна, а именно к авторулевым.
Целью изобретения является повышение эффективности путем уменьшения числа перекладок руля, при движении судна на волнении.
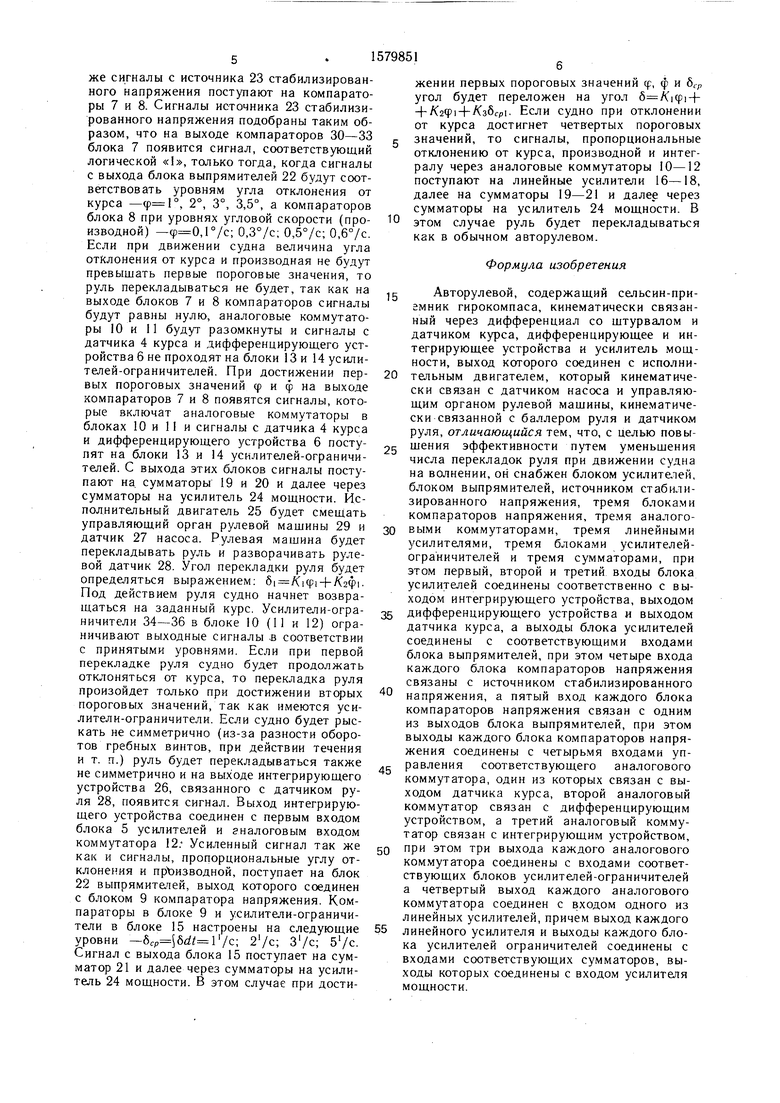
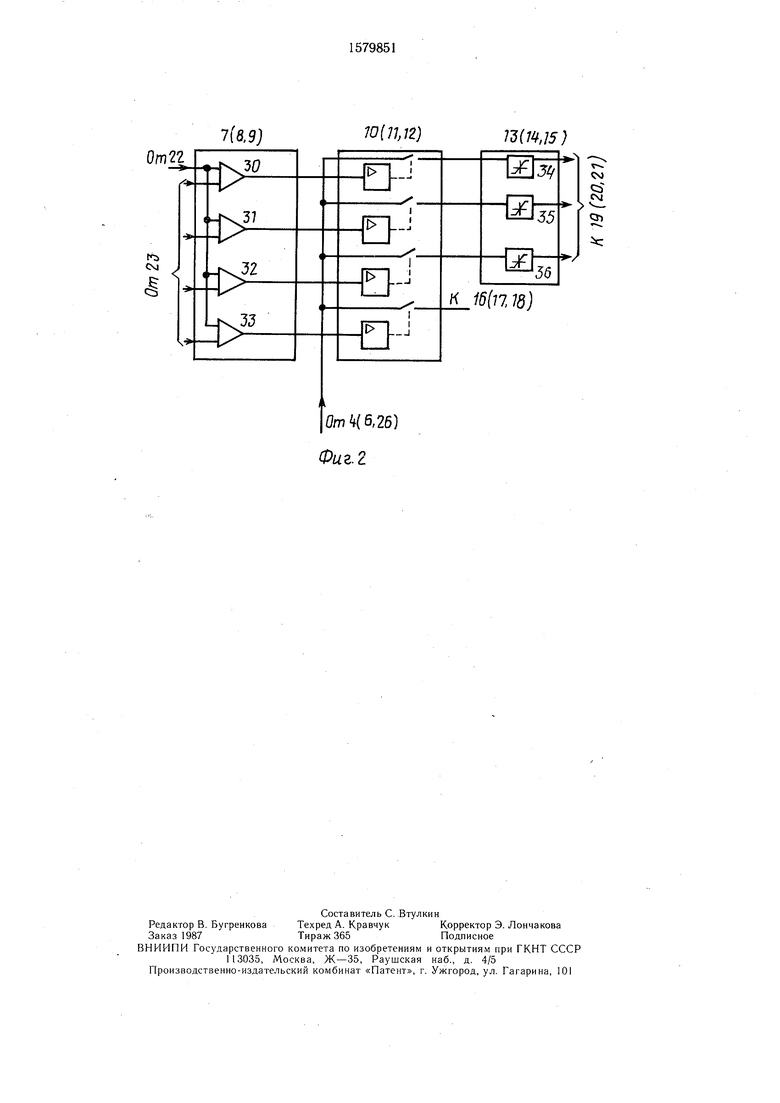
На фиг. 1 приведена блок-схема авторулевого; на фиг. 2 - блок-схема компаратора напряжения, аналогового коммутатора и блока усилителей-ограничителей.
Авторулевой содержит сельсин-приемник гирокомпаса 1, дифференциал 2, штурвал 3, датчик 4 курса, блок 5 усилителей, дифференцирующее устройство 6, блоки 7-9 компараторов напряжения, аналоговые комму- таторы 10-12, блоки 13-15 усилителей- ограничителей, линейные усилители 16-18, сумматоры 19-2, блок 22 выпрямителей, источник 23 стабилизированного напряжения, усилитель 24 мощности, исполнитель- ный двигатель 25, интегрирующее устройство 26, датчик 27 насоса, датчик 28 руля, рулевую машину 29, компараторы 30-33 напряжения и усилители-ограничители 34- 36. Сельсин-приемник 1 гирокомпаса кинематически связан через дифференциал 2 со штурвалом 3 и датчиком 4 курса, выход которого соединен с входом дифференцирующего устройства 6, с третьим входом блока 5 усилителей и с аналоговым входом коммутатора 10. Выход дифференцирующего устройства 6 соединен с вторым входом блока 5 усилителей и аналоговым входом коммутатора 11. Выходы блока 5 усилителей соединены с входами блока 22 выпрямителей а выходы блока 22 выпрямителей и выходы источника 23 стабилизированного напряжения соединены с входами блоков 7-9 компараторов. Выходы блоков 7-9 компараторов соединены с управляющими входами соответствующих аналоговых коммутаторов
10-12, причем три выхода каждого из аналоговых коммутаторов 10-12 подключены на входы соответствующих блоков 13-15 усилителей-ограничителей, а четвертый выход аналоговых коммутаторов 10-12 подключен на вход соответствующего линейного усилителя 16-18. Выходы блоков 13-15 усилителей-ограничителей и линейных усилителей 16-18 подключены к входам соответствующих сумматоров 19-21, выходы которых через сумматоры соединены с входом усилителя 24 мощности. На вход усилителя 24 мощности подключены также выходы датчика 27 насоса и датчика 28 руля. Выход усилителя мощности электрически соединен с исполнительным двигателем 25, который кинематически сязан с датчиком 27 насоса и управляющим органом рулевой машины 29 кинематически связанной с баллером руля и датчиком 28 руля, выход которого соединен с входом интегрирующего устройства 26. Выход интегрирующего устройства 26 соединен с первым входом блока 5 усилителей и с аналоговым входом коммутатора 12.
Авторулевой работает следующим образом.
В нем осуществляется дискретная перекладка руля в зависимости от уровней входных сигналов. При отклонении судна от курса сельсин-приемник 1 гирокомпаса через механический дифференциал 2 развернет датчик 4 курса., Штурвал 3 служит для введения градусных поправок к курсу. Сигнал с датчика 4 курса поступает на вход дифференцирующего устройства 6, третий вход блока 5 усилителей и аналоговый вход коммутатора 10, а сигнал с выхода дифференцирующего устройства 6 - на второй вход блока 5 усилителей и аналоговый вход коммутатора 11. Усиленные в блоке 5 усилителей сигналы поступают на входы блока 22 выпрямителей. Выпрямленные сигналы, а
же сигналы с источника 23 стабилизированного напряжения поступают на компараторы 7 и 8. Сигналы источника 23 стабилизированного напряжения подобраны таким образом, что на выходе компараторов 30-33 блока 7 появится сигнал, соответствующий логической «1, только тогда, когда сигналы с выхода блока выпрямителей 22 будут соответствовать уровням угла отклонения от курса , 2°, 3°, 3,5°, а компараторов блока 8 при уровнях угловой скорости (про- изводной) - ,Г/с; 0,3°/с; 0,5°/с; 0,6°/с. Если при движении судна величина угла отклонения от курса и производная не будут превышать первые пороговые значения, то руль перекладываться не будет, так как на выходе блоков 7 и 8 компараторов сигналы будут равны нулю, аналоговые коммутаторы 10 и 11 будут разомкнуты и сигналы с датчика 4 курса и дифференцирующего устройства б не проходят на блоки 13 и 14 усилителей-ограничителей. При достижении пер- вых пороговых значений р и ф на выходе компараторов 7 и 8 появятся сигналы, которые включат аналоговые коммутаторы в блоках 10 и 11 и сигналы с датчика 4 курса и дифференцирующего устройства 6 поступят на блоки 13 и 14 усилителей-ограничителей. С выхода этих блоков сигналы поступают на сумматоры 19 и 20 и далее через сумматоры на усилитель 24 мощности. Исполнительный двигатель 25 будет смещать управляющий орган рулевой машины 29 и датчик 27 насоса. Рулевая машина будет перекладывать руль и разворачивать рулевой датчик 28. Угол перекладки руля будет определяться выражением: (i(pi-T-/C2 pi. Под действием руля судно начнет возвращаться на заданный курс. Усилители-ограничители 34-36 в блоке 10 (11 и 12) ограничивают выходные сигналы .в соответствии с принятыми уровнями. Если при первой перекладке руля судно будет продолжать отклоняться от курса, то перекладка руля произойдет только при достижении вторых пороговых значений, так как имеются усилители-ограничители. Если судно будет рыскать не симметрично (из-за разности оборотов гребных винтов, при действии течения и т. п.) руль будет перекладываться также не симметрично и на выходе интегрирующего устройства 26, связанного с датчиком руля 28, появится сигнал. Выход интегрирующего устройства соединен с первым входом блока 5 усилителей и аналоговым входом коммутатора 12: Усиленный сигнал так же как и сигналы, пропорциональные углу отклонения и прЪизводной, поступает на блок 22 выпрямителей, выход которого соединен с блоком 9 компаратора напряжения. Компараторы в блоке 9 и усилители-ограничители в блоке 15 настроены на следующие уровни -6Cp S6 l /c; 2 /c; З /с; 5 /с. Сигнал с выхода блока 15 поступает на сумматор 21 и далее через сумматоры на усилитель 24 мощности. В этом случае при дости
15
10 0 о 0 5
5
5
0
жении первых пороговых значений р, ф и 6f;, угол будет переложен на угол + /С2ф1 + Л збср1. Если судно при отклонении от курса достигнет четвертых пороговых значений, то сигналы, пропорциональные отклонению от курса, производной и интегралу через аналоговые коммутаторы 10-12 поступают на линейные усилители 16-18, далее на сумматоры 19-21 и далее через сумматоры на усилитель 24 мощности. В этом случае руль будет перекладываться как в обычном авторулевом.
Формула изобретения
Авторулевой, содержащий сельсин-приемник гирокомпаса, кинематически связанный через дифференциал со штурвалом и датчиком курса, дифференцирующее и интегрирующее устройства и усилитель мощности, выход которого соединен с исполнительным двигателем, который кинематически связан с датчиком насоса и управляющим органом рулевой машины, кинематически связанной с баллером руля и датчиком руля, отличающийся тем, что, с целью повышения эффективности путем уменьшения числа перекладок руля при движении судна на волнении, он снабжен блоком усилителей, блоком выпрямителей, источником стабилизированного напряжения, тремя блоками компараторов напряжения, тремя аналоговыми коммутаторами, тремя линейными усилителями, тремя блоками усилителей- ограничителей и тремя сумматорами, при этом первый, второй и третий входы блока усилителей соединены соответственно с выходом интегрирующего устройства, выходом дифференцирующего устройства и выходом датчика курса, а выходы блока усилителей соединены с соответствующими входами блока выпрямителей, при этом четыре входа каждого блока компараторов напряжения связаны с источником стабилизированного напряжения, а пятый вход каждого блока компараторов напряжения связан с одним из выходов блока выпрямителей, при этом выходы каждого блока компараторов напряжения соединены с четырьмя входами управления соответствующего аналогового коммутатора, один из которых связан с выходом датчика курса, второй аналоговый коммутатор связан с дифференцирующим устройством, а третий аналоговый коммутатор связан с интегрирующим устройством, при этом три выхода каждого аналогового коммутатора соединены с входами соответствующих блоков усилителей-ограничителей а четвертый выход каждого аналогового коммутатора соединен с входом одного из линейных усилителей, причем выход каждого линейного усилителя и выходы каждого блока усилителей ограничителей соединены с входами соответствующих сумматоров, выходы которых соединены с входом усилителя мощности.
7(8.9)
10(11,12)
ШЮ.15)
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1988 |
|
SU1527092A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Система управления судном | 1977 |
|
SU644666A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
Изобретение относится к автоматическому управлению курсом судна, а именно к авторулевым, и решает задачу повышения эффективности путем уменьшения числа перекладок руля при движении судна на волнении. Сущность изобретения: авторулевой снабжен блоком усилителей, блоком выпрямителей, источником стабилизированного напряжения, тремя блоками компараторов напряжения, тремя аналоговыми коммутаторами, тремя литейными усилителями, тремя блоками усилителей ограничителей и тремя сумматорами, при этом первый, второй и третий входы блока усилителей соединены соответственно с выходом дифференцирующего устройства и выходом датчика курса, выходы блока усилителей соединены соответствующими входами блока выпрямителей, при этом четыре входа каждого блока компараторов напряжения связаны с источником стабилизированного напряжения, а пятый вход каждого блока компараторов напряжения связан с одним и выходов блока выпрямителей, при этом выходы каждого блока компараторов напряжения соединены с четырьмя входами управления соответствующего аналогового коммутатора, один из которых связан с выходом датчика курса, второй аналоговый коммутатор связан с интегрирующим устройством, при этом три выхода каждого аналогового коммутатора соединены с входами соответствующих блоков усилителей-ограничителей, а четвертый выход каждого аналогового коммутатора соединен с входом одного из линейных усилителей, причем выход каждого линейного усилителя и выходы каждого блока усилителей ограничителей соединены с входами соответствующих сумматоров, выходы которых соединены с входом усилителя мощности. 2 ил.
От Ц6,26) Фиг.2
| Мордовченко Д | |||
| Н | |||
| и др | |||
| Техническая эксплуатация авторулевых, 1980, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
