1
Изобретение относится к техническим средствам обучающих систем и может быть использовано в тренажерах для операторов радиолокационных станций, диспетчеров аэропортов и операторов сложных систем управления, осуществляющих наблюдение за группой движущихся объектов.
Известны устройства, позволяющие оценить качество деятельности оператора при выполнении им операций над одним безынерционным объектом по соотношению ошибки с нормативными значениями. Устройства этого типа содержат блок оценки, блок сравнения, блок нормативных значений и блок индикации nj.
Более обобщенную оценку точности действий оператора, выполняющего операции над одним инерционным объектом, формирует устройство, наиболее, близкое к изобретению и содержащее синхронизатор, соединенный с ключами и блоком аварийных ситуаций, блок определения ошибки, соединенный с ключами, блоком задания допустимой ошибки, выпрямителем и блоком аварийных ситуаций, который соединен о блоком задания допустимой ошибки и индикатором ошибки. К индикатору
ошибки подключен также блок сравнения, соединенный с блоком нормативов и интегратором, который подключен к выпрямителю и задатчику времени 2. Недостатком такого устройства является его применимость для оценки точности действий операторов в достаточно простых условиях. Для операторов сложных систем управления,
0 осуществляющих одновременно управление группой объектов (или наблюдение за группой движущихся объектов) в условиях дефицита времени критерии оценки точности их действий, за5ложенные в устройствах такого типа, являются недостаточными.
Цель изобретения - повышение точности оценки за счет учета всего комплекса составляющих действий оператора, осуществляющего управле0ние группой объектов или наблюдение за ними.
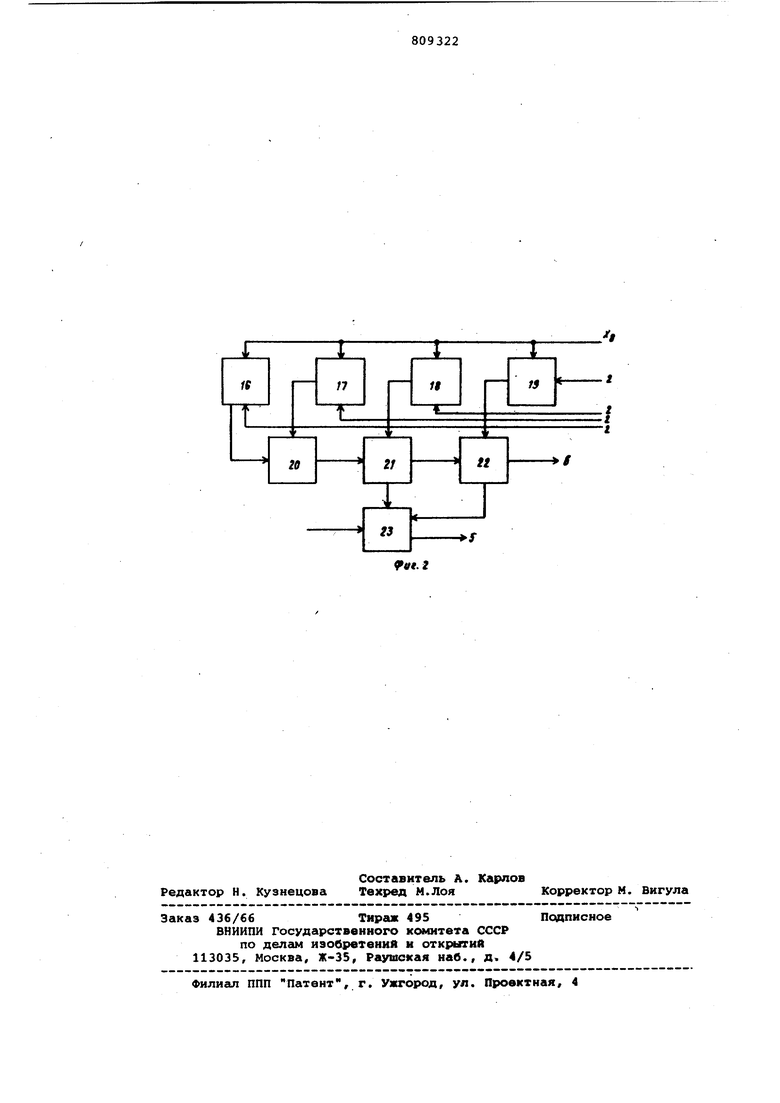
Указанная цель достигается тем, что в известное устройство, содержащее блок ввода эталонов, соединенный с первым входом блока сравнения, первый блок ключей, входы которого подключены к первым и вторым входам устройства, и блок индикации, введены коммутатор, блок анализа дейстВИЯ оператора, четыре счетчика, четыре блока деления и второй блок клю чей , выходы которого соединены с бло ком индикации, первые входы - с вторыми входами устройства, вторые входы - с выходами блоков деления, первые входы которых через первый счетчик подключены к вторым входам устро ства, вторые входы блоков деления соединены соответственно с выходами второго, третьего и четвертого счетчиков и с выходом блока ввода эталонов/ выходы блока сравнения соединены с входами третьего и четвертого счетчиков,а второй вход - с одним выходом блока анализа действий оператора, другой выход которого под ключен к входу второго счетчика, первые входы блока анализа действий оператора соединены непосредственно с вторыми входами устройства, а вторые входы - через KONHvtyTaTOp со вторыми входами устройства и с выходами первого блока ключей, причем блок анализа действия оператора содержит последовательно включенные группу сумматоров, узлов сравнения и элемент ИЛИ, подключенный к первым вхо ду и выходу блока, входы сумматоров соединены с вторыми входами бло ка, выход одного из узлов сравнения подключен к второму выходу блока. Посредством счетчиков, регистрирующих ошибки отождествления, и пер вого блока деления в устройстве определяется вероятность неправильного отождествления объектов оператором. Счетчик, регистрирующий число срывов, и второй блок деления служат для подсчета вероятности воз никновения аварийных ситуаций, а счетчик, регистрирующий оценки, и третий блок деления - для определеВИЯ вероятности правильного управления оператором. С помощью счетчи ка, регистрирующего числа управлений, и четвертого блока деления и блока эталонов определяется пропуск ная способность оператора, т.е. относительное количество перерабатываемой информации. На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 структура блока анализа действий оп ратора . Устройство содержит блок 1 ключе подключенный к коммутатору 2, соединенному с блоком 3 анализа действий оператора. На блок 1, коммутатор 2, блок 3 и счетчик 4 числа управлений поступает сигнал о управляющем воздействии оператора с тренажера. Блок 3 соединен со счетчиком 5 ошибок отож дествления и блоком б сравнения, ко торый соединен с блоком 7 эталонов счетчиком 8 срывов и счетчиком 9 юценки. Счетчик 4 соединен с первы ми входами блоков 10-13 деления,вторые входы которых соединены соответственно со счетчиком 5, счетчиком 8, счетчиком 9 и блоком 7 эталонов. Блоки 10-13 через второй блок 14 ключевой соединены с блоком 15 индикации. БЛОК 3 содержит сумматоры 16-19, входы которых соединены с соответствующими входами блока, а выходы с последовательно соединенными узлами 20-23 сравнения, которые подключены к элементу 23 ИЛИ. Выход элемента 23 ИЛИ и узла 22 сравнения подключены к выходс1М блока 3. Структура блока 3 приведена для случая п 4 управляемым объектом. Устройство для оценки профессиональной пригодности операторов автоматизированных систем управления работает следующим образом. Оператор осуществляет наблюдение за п движущимися объектами, последовательно определяя их координаты. На блок 1 постоянно поступают по п шинам одновременно истинные координаты объектов и в момент ввода оператором на тренажере координаты любого объекта управляющий сигнал поступает на блок 1, открывая его, и он же по соответствующей шине поступает в коммутатор 2. Блок 1 пропускает по всем п шинам сигналы об истинных координатах объектов на коммутатор 2. Коммутатор 2 имеет 2п входов и п выходов.и работает следующим образом. Если управляющий сигнал от тренажера поступает на i-ой шине, то коммутатор 2 по первой выходной шине пропускает на блок 3 сигнал, который поступил от блока 1 по i-ой шине и наоборот, по i-ой выходной шине пропускает сигнал, который поступил на 1-ую шину. Остальные сигналы от блока 1 выходят из коммутатора 2 по одноименным шинам. Управляющий сигнал от тренажера поступает также на счетчик 4 числа управлений и первые входы блока ЗУ на который также поступает п сигналов с выходных шин коммутатора 2. На вторые входы сумматоров 16-19 поступает в противофазе п сигналов от коммутатора 2 (п ) , а на первые входы - управляющий сигнал. На выходе первого сумматора 16 формируется сигнал, равный ошибке определения координаты наблюдаемого объекта, а на остальных сумматорах 17-19 - разность между вводимой координатой наблюдаемого объекта и истинными координатами других объектов. Выходные сигналы сумматоров 16 и 17 поступают на узел 20 сравнения, сумматора 18 - на узел 21, сумматора 19 - на узел 22. Если сигнал с сумматора 16 меньше сигнала с выхода сумматора 17, значит, оператор сделал ошибку в отояадествлении Объекта и узел 20 сравнения выраба тывает сигнал, который поступает н элемент 23 ИЛИ. В противном случае узел 20 сравнения пропускает сигнал с выхода сумматора 16 на узел 21 Сравнения. Узлы 20 и 21 выполняют ФУНКЦИЙ, аналогичные функции узла Если оператор правильно провел отождествление объекта, то на элемент 23 ИЛИ не поступит сигнал об ошибке с узлов 21 и 22 сравнения и сигнал с первого сумматора 16 о ра ности истинной координаты и вводимой оператором пройдет через все узлы 20-22 сравнения и поступит на блок 6 сравнения, на который также поступает сигнал о нормативном значении ошибки с блока 7. Если сигнал из блока 3 больше нормативного, то блок 6 сравнения вырабатывает импульс, поступающий на счетчик 8 чис ла срывов. В противном случае блок 6 вырабатывает импульс на счетчик 9 оценок. Если оператор провел отождествле ние неправильно, то один из узлов 20-22 сравнения выработает сигнал об ошибке, который через элемент 23 ИЛИ поступит на счетчик 5 ошибок отождествления. Сигнал о количестве управляющих воздействия Ny , введенных операторо поступает из счетчика 4 числа управлений на первые входы всех блоков 10-13. На второй вход блока 10 поступает сигнал о количестве ошибок отождествления со счетчика 5 и он определяет величину Ррщ , соответствующую вероятно ти неправильного отождествления объ екта. На второй вход блока 11 поступает сигнал о количестве срывов управления Мер со счетчика 8 и он определяет величину Рср . Р - , соответствующую вероятности срывов уп равления. На второй вход блока 12 поступает сигнал о количестве правильно выполненных управляющих воздействий Nnp со счетчика 9, и блок 12 определяет величину Р„ . соответствующую вероятности правильно го выполнения задания,- На второй вход блока 13 поступает сигнал из блока 7 о требуемом количестве упра ляющих воздействий за время цикла тренировки и блок 13 определя величину Р соответствующую относительному количеству вводимых оператором управляющих воздействий. Сигналы, соответствующие величи огп блоков нам Quj , ср пр 10-13 поступают через блок 14 на блок 15. Блок 14 открывается на определенное время в момент ввода оче редного управляющего воздействия оп ратором на тренажере. Таким образом, введение новых отличительных признаков позволяет оценить весь комплекс точностных ха-. рактеристик деятельности оператора при управлении им группой объектов (или наблюдении за ними), а именно относительное количество правильных управляющих воздействий оператора (или относительное количество управляющих воздействий, выполненных на определенную оценку), относительное количество срьшов управления, относительное количество ошибок отождествления (перепутывания) объектов, относительное количество введенных операторов управляющих воздействий за цикл тренировки (пропускную спо-; собность оператора}. Указанные характеристики полностью оценивают точность деятельности оператора при управлении им группой безынерционных объектов или наблюдении за ними. По значениям получаемых характеристик.-можно составить психофизиологический портрет оператора, оценить быстроту реакции по относительному количеству введенных управляющих воздействий, оценить характеристику зрительного анализатора данного оператора по относительному количеству правильных управляющих воздействий, оценить точность моторных компонентов.деятельности по относительному количеству срывов управления, оценить устойчивость психофизиологических качеств оператора по изменению оцениваемых характеристик за время тренировки. Все это также расширяет функциональные возможности устройства. Формула изобретения 1. Устройство для оценки профессиональной пригодности операторов автоматизированных систем управления , содержащее блок ввода эталонов, соединенный с первым входом блока сравнения, первый блок ключей, входы которого подключены к первым и вторым входам устройства, и блок индикации, отличающееся тем, что,с целью повышения точности оценки, оно содержит коммутатор, блок анализа действий оператора, чеыре счетчика, четыре блока деления и второй блок ключей, выходы которого соединены с блоком индикации, первые входы - с вторыми входами устройства , вторые входы - с выходами блоков деления, первые входы которых ерез первый счетчик подключены к вторым входам устройства, вторые ходы блоков деления соединены соотетственно с выходами второго, треьего и четвертого счетчиков и с ыходом блока ввода эталонов, выходы блока сравнения соединены с входами третьего и четвертого счетчиков, а второй вход - с одним выходом блока анализа действий оператора, другой выход которого подключен к входу второго счетчика, первые входы блока анализа действий оператора соединены непосредственно с вторыми входами устройства, а вторые вхо ды - через коммутатор с вторыми входами устройства и с выходами первого блока ключей.
2. Устройство по п. 1, отличающееся тем, что в нем блок анализа действий оператора содержит последовательно включенные группу
сумматоров, группу узлов сравнения и элемент ИЛИ, подключенный к первым входу и выходу блока, входы сумматоров соединены с вторыми входами блока, выход одного из узлов сравнения подключен к второму выходу блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке 272а877/18-24,
кл. G 09 В 7/02, 23.02.79.
2.Авторское свидетельство СССР 431534, кл. G 09 В 9/06, 1974 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер операторов систем управления | 1983 |
|
SU1138821A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Устройство трансляции | 1986 |
|
SU1390629A1 |
| Тренажер оператора локационных станций | 1982 |
|
SU1072086A2 |
| Устройство для оценки профессиональной пригодности оператора ручной системы управления | 1982 |
|
SU1061171A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Устройство для считывания графической информации | 1979 |
|
SU877584A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |