(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ МЕСТЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической остановки транспортного средства в заданном месте | 1982 |
|
SU1142319A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство регулирования скорости путевой машины | 2023 |
|
RU2803807C1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Стенд для испытания транспортных средств | 1980 |
|
SU1012072A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Устройство регулирования пропорционального давления подбоек путевой машины | 2023 |
|
RU2820198C1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
1
изобретение относится к области управления транспортными средствами и может быть использовано, например, в металлургическом производстве, для остановки в месте загрузки и выгрузки слитков, где требуется .точная остановка.
Известно устройство для автоматической остановки транспортного средства в заданном месте, содержашее соединенные последовательно командоконтролер, блок регулирования реяшмов, соединенный с тормозным блоком, и тиристорный преобразователь, подключенный к двигателю, соединенному через npeo6pai3OBaтель, подключенный к двигателю, соединенному через тахогёнератор с блоком регулирования режимов, путевые датчики определения местоположения транспортного средства (1J.
Недостатком данного устройства является низкая надежность и точность остановки.
Цель изобретения повышение точности остановки.
Поставленная цель достигается тем, что путь участка остановки установлен на двух опорах, а устройство снабжено реверсивным
усилителем, пу1гевыми датчиками и включенными между ними промежуточными усилителями, причем путевые датчики выполнены в виде установленных на опорах тензометрических элементов.
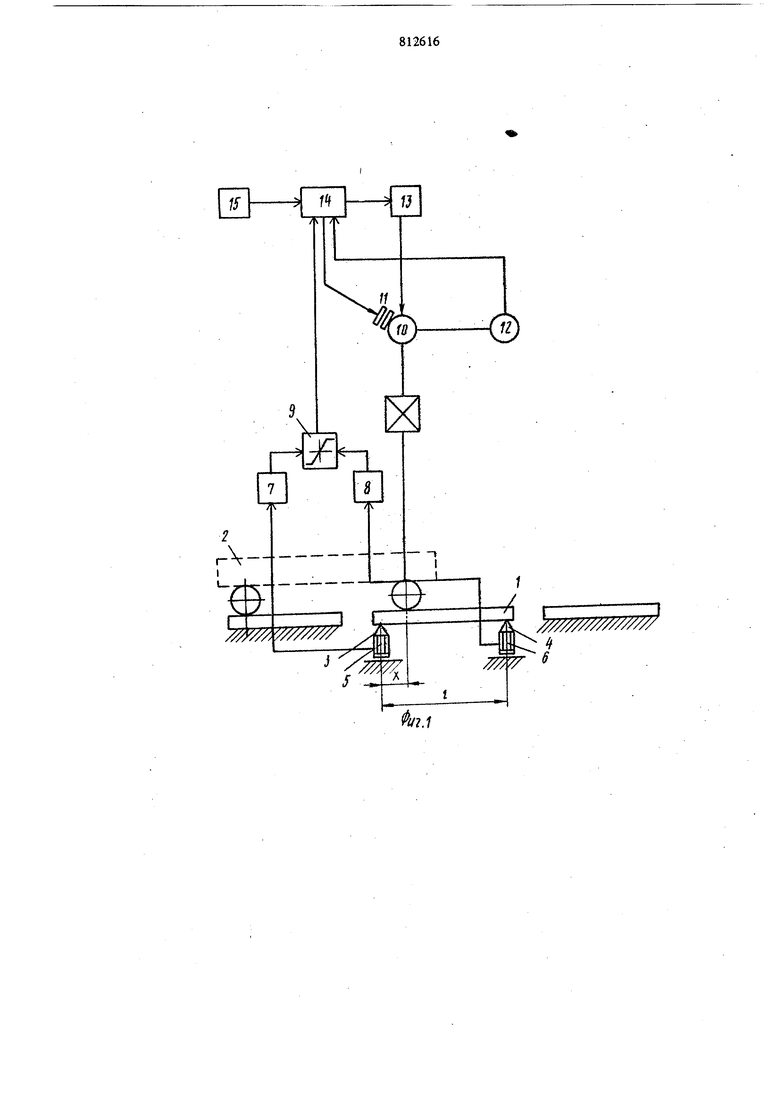
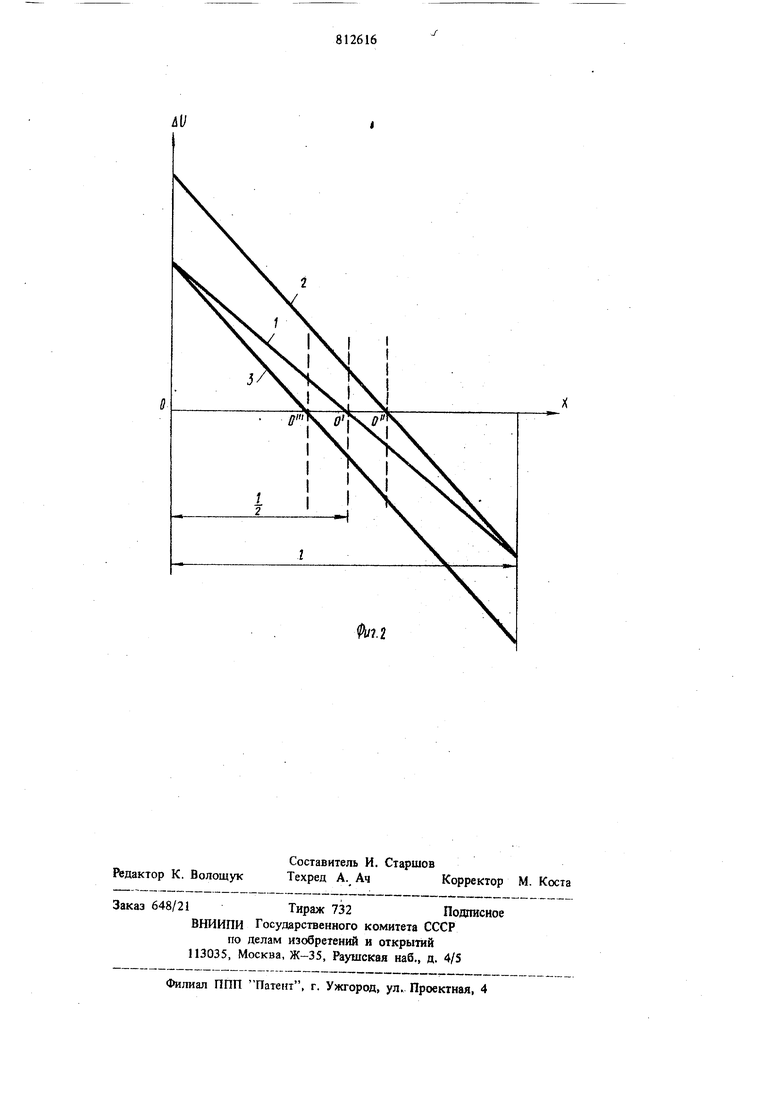
На фиг. 1 - показано устройство, обиош вид; на фиг. 2 - зависимость суммарного выходного сигнала с путевых датчиков.
Устройство состоит из рельсового участка 1 для остановки транспортного средства 2.
0 Участок 1 остановки установлен на двух опорах 3 и 4, размещенных по концам участка и снабженных путевыми датчиками 5 и 6 величины реакции опор от нагрузки транспортного средства 2. Датчики 5 и 6 могут быть
5 выполнены, например, в виде тензометрических элементов. Выходы каждого датчика 5 и 6 через промежуточные усилители 7 и 8 с регулируемым коэффициентом усиления включены встречно в реверсивный усилитель 9, включенный в систему управления транспортным средством. Система управления состоит из двигателя 10, тормоза II, тахогенератора 12, тиристорного преобразователя 13, блока регулирования режимов 14 и задающего коман доконтролера 15. Устройство работает следующим образом. При приближеш{и транспортного средства 2 к участку 1 остановки рельсового пути пред варительно срабатывает датчик пути (не пока зан) и дает комавду на снижение скорости приводного двигателя. При входе первой колесной пары транспортного средства 2 на участок i на выходе датчиков 5 и 6 появля ются сигналы (реакция опор от нагрузки транспортного средства), которые через усили тели 7 и 8 с регулируемыми коэффициентами усиления подаются встргчно на входы суммирующего реверсивного усилителя 9. На выходе усилителя 9 появляется сигнал, пропорциональный расстоянию от точки касания первой колесной пары до точки остановки. На фиг. 2 показана зависимость величины fi. и выходного сигнала с усилителя 9 от текущего значения расстояния X, пройденного колесной парой от начала остановочного участ ка длиной . Прямая 1 определяет зависимость при одинаковых коэффициентах усиле1ШЯ KI и Kj, соответствующих промежуточных усилителей 7 и 8 с точкой остановки О Прямая 2 показывает зависимость при KI KJ (точка остановки О ), прямая 3 при KI KJ (точка остановки Q ). С усилителя 9 сигнал поступает в блок регулирования режимов 14, который переводит тиристорньш преобразователь в режим торможеьгия и поддерживает заданную интенсивность торможения в зависимости от величины сигнала, пропор1 4ционального расстоянию от точки касания колесной пары до точки oCTaiioBKH, и сигнала отрицательной обратной связи по скорости двигателя 10, поступающего от тахогенератора 12. Торможение происходит до исчезновения сигнала в точке остановки. Отрицательная обратная связь по скорости двигателя 10 служит также для устранения перерегулирования в месте остановки и регулирования скорости в двигательном режиме. Формула изобретения Устройство для автоматической остановки транспортного средства в заданном месте, содержащее соединенные последовательно комавдокон-гроллер, блок регулирования режимов, соединен 1Ый с тормозным блоком, и тиристорный преобразователь, подключенный к двигателю, соединенному через тахогенератор с блоком регулирования режимов, путевые датчики определения местонахождения транспортного средства, отличающее С Я тем, что с целью повышения точности остановки, путь участка остановки установлен на двух опорах и устройство снабжено реверсивным усилителем, путевыми датчиками и включенными между ними промежуточными усилителями, причем путевые датчики выполнены в вшГе установленных на опорах тензометрических элементов. Источники информации, принятые во внимание при экспертизе 1. Патент Японии Ni 48-31234, В 65 G 17/00, 1973.
ЖТЖ
3 с
W///////
5 -
-4п
1
W
2
С
/////////////////
