Изобретение относится к области измерительной техники и предназначено для поиска кабельных линий с током, утерянных трубопроводов и буров в геологических скважинах, обнаружения дефектов печатных плат, поиска ферромагнитных предметов в теле человека, для обнаружения скрытого оружия на контрольных пунктах и т.д.
Известен магнитный градиентометр с компенсацией несоосностей (пат. США N 3488579, кл. 324-43, G 01 R 33/02, 1970), содержащий два основных магниточувствительных датчика, оси которых приблизительно коллинеарны выбранной оси, два дополнительных магниточувствительных датчика, оси которых перпендикулярны друг другу и упомянутой выбранной оси, генератор переменной ЭДС, первый выход которого подключен ко входам основных и дополнительных датчиков, три усилительно-преобразовательных блока, первые входы которых подключены ко второму выходу генератора переменной ЭДС, второй и третий входы первого усилительно-преобразовательного блока подключены к соответствующим выходам основных датчиков, а вторые входы второго и третьего усилительно-преобразовательных блоков подключены к выходам соответствующих дополнительных датчиков, два резистора, две катушки компенсации, одна из которых подключена через первый резистор к выходу второго усилительно-преобразовательного блока, а вторая катушка компенсации подключена через второй резистор к выходу третьего усилительно-преобразовательного блока, и регистрирующий прибор, подключенный к выходу первого усилительно-преобразовательного блока, при этом катушки компенсации размещены на соответствующих основных датчиках соосно с их осями.
Известное устройство работает следующим образом. На входы четырех магниточувствительных датчиков, в частности феррозондов, подается с генератора переменной ЭДС напряжение, возбуждающее эти датчики. В результате этого на выходе каждого датчика появляется ЭДС второй гармоники, пропорциональная проекции вектора магнитной индукции на магнитную ось соответствующего датчика (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с.66). Выходные сигналы с основных датчиков подаются на второй и третий входы первого усилительно-преобразовательного блока. Первый усилительно-преобразовательный блок осуществляет вычитание поступающих на его входы сигналов, а затем усиление и детектирование разностного сигнала, пропорционального градиенту магнитной индукции, который далее поступает на регистрирующий прибор. Выходные сигналы с дополнительных датчиков усиливаются и детектируются в соответствующих втором и третьем усилительно-преобразовательных блоках. Сигнал с выхода второго усилительно-преобразовательного блока пропорционален проекции вектора магнитной индукции на ось первого дополнительного датчика, а сигнал с выхода третьего усилительно-преобразовательного блока пропорционален вектору магнитной индукции на ось второго дополнительного датчика. Один из резисторов, подключенный к выходу второго усилительно-преобразовательного блока и к катушке компенсации, размещенной на первом основном датчике, обеспечивает такой ток, протекающий в упомянутой катушке, чтобы она воспроизводила магнитное поле равное по величине и противоположное по направлению ложному градиенту магнитного поля, обусловленного непараллельностью осей основных датчиков при наличии однородного магнитного поля, действующего параллельно оси первого дополнительного датчика. Другой резистор, подключенный к выходу третьего усилительно-преобразовательного блока и к катушке компенсации, размещенной на втором основном датчике, обеспечивает такой ток, протекающий в этой катушке, чтобы она воспроизводила магнитное поле равное по величине и противоположное по направлению ложному градиенту магнитного поля, обусловленного непараллельностью осей основных датчиков при наличии однородного магнитного поля, действующего параллельно оси второго дополнительного датчика.
Известным устройством невозможно измерить слабый градиент магнитной индукции из-за неидентичности чувствительностей основных магнито-чувствительных датчиков при наличии сильного однородного магнитного поля, в частности, геомагнитного поля, действующего в направлении осей основных датчиков. Так, например, даже при неидентичности чувствительностей основных датчиков 2•10-5, что составляет тысячную долю процента в магнитном поле Земли 5•104 нТл, погрешность измерения разности магнитной индукции для основных датчиков составит ±1 нТл. Это значит, что для градиентного включения датчиков упомянутых магнитометров погрешность измерения разностного сигнала может быть вдвое больше.
Известно устройство для измерения магнитного поля (Авт.св. N 662885, БИ N 18, 1979), которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из генератора переменной ЭДС, трех синхронных детекторов (усилительно-преобразовательных блоков), первые входы которых подключены к первому выходу генератора переменной ЭДС, двух двухкомпонентных магниточувствительных датчиков, одни оси которых коллинеарны, а вторые оси взаимно ортогональны, двух резисторов, двух катушек компенсации, первый вывод одной из которых подключен через первый резистор к выходу первого усилительно-преобразовательного блока, а первый вывод второй катушки компенсации подключен через второй резистор к выходу второго усилительно-преобразовательного блока, и регистрирующего прибора, подключенного к выходу третьего усилительно-преобразовательного блока. Вторые выводы обеих катушек компенсации подключены к общему контакту данного устройства, вторые входы первого и второго усилительно-преобразовательных блоков подключены к первым сигнальным выходам векторов магнитной индукции соответственно первого и второго датчиков, ориентированных по направлениям взаимно ортогональных осей упомянутых датчиков, второй и третий входы третьего усилительно-преобразовательного блока подключены ко вторым сигнальным выходам векторов магнитной индукции соответственно первого и второго датчиков, ориентированных по направлениям коллинеарных осей этих датчиков, входы обоих датчиков подключены ко второму выходу генератора переменной ЭДС, при этом оба магниточувствительных датчика установлены внутри помещенных одна в другой катушек компенсации, оси которых взаимно ортогональны. Коллинеарные оси датчиков перпендикулярны осям катушек компенсации, а взаимно ортогональные оси упомянутых датчиков параллельны соответствующим осям этих катушек.
Известное устройство работает следующим образом. На вторые входы обоих двухкомпонентных датчиков, у которых магниточувствительные элементы выполнены, например, в виде рамок или колец с взаимно ортогональными плоскостями, подается с генератора переменной ЭДС возбуждающее напряжение. В результате этого на первых сигнальных выходах векторов магнитной индукции каждого датчика появляются напряжения второй гармоники, пропорциональные значениям векторов магнитной индукции, ориентированных по направлениям взаимно ортогональных осей этих датчиков. На вторых сигнальных выходах векторов магнитной индукции каждого датчика появляются напряжения второй гармоники, пропорциональные значениям векторов магнитной индукции, ориентированных по направлению коллинеарных осей этих датчиков. Таким образом, сигнал с первого выхода первого датчика, пропорциональный вектору магнитной индукции, перпендикулярному плоскости рамки или кольца второго датчика, подается на второй вход первого усилительно-преобразовательного блока, а сигнал с первого выхода второго датчика, пропорциональный вектору магнитной индукции, перпендикулярному плоскости рамки или кольца первого датчика, подается на второй вход второго усилительно-преобразовательного блока. Сигналы же со вторых выходов обоих датчиков, пропорциональные векторам магнитной индукции, ориентированных по направлению коллинеарных осей этих датчиков, подаются соответственно на второй и третий входы третьего усилительно-преобразовательного блока. Для выпрямления сигналов с трех усилительно-преобразовательных блоков, полярность которых изменялась бы с изменением направления вектора магнитной индукции на угол 180o, на первые входы упомянутых усилительно-преобразовательных блоков подается напряжение с генератора переменной ЭДС. Выходной сигнал с первого усилительно-преобразовательного блока поступает на первую катушку компенсации через первый резистор, а выходной сигнал со второго усилительно-преобразовательного блока поступает на вторую катушку компенсации через второй резистор. Протекающие токи в катушках компенсации создают магнитное поле, вектор магнитной индукции которого равен по величине и противоположен по направлению вектору магнитной индукции, ориентированному перпендикулярно коллинеарным осям датчиков. Выходной сигнал с выхода третьего усилительно-преобразовательного блока, пропорциональный разности векторов магнитной индукции, ориентированных по направлению коллинеарных осей датчиков, подается на регистрирующий прибор. Этот сигнал с учетом расстояния между датчиками градуируется в сигнал, пропорциональный пространственной производной вектора магнитной индукции, то есть пропорциональный градиенту магнитной индукции.
Известным устройством, как и аналогом, невозможно измерить слабый градиент магнитной индукции из-за неидентичности чувствительностей датчиков, оси которых должны быть коллинеарны, при наличии сильного однородного магнитного поля, например, геомагнитного поля, действующего в направлении осей упомянутых датчиков. Так, например, даже при неидентичности чувствительностей упомянутых датчиков 2•10-5, что составляет 0,002% в магнитном поле Земли 2•104 нТл, погрешность измерения разности магнитной индукции может составить ±1 нТл. Это значит, что для градиентного включения датчиков упомянутых магнитометров погрешность измерения разностного сигнала может быть вдвое больше. Кроме того известным устройством невозможно обеспечить ослабление влияния сильного однородного магнитного поля, перпендикулярного коллинеарным осям датчиков, если диаметр или максимальная сторона каждой катушки компенсации незначительно превышает максимальное расстояние (базу градиентометра) между магниточувствительными элементами двух датчиков, что обусловлено наличием сильного неоднородного магнитного поля, воспроизводимого этими катушками в местах расположения датчиков. Неоднородность магнитного поля в объеме магниточувствительного элемента датчика приводит к возникновению ложного сигнала с его выхода, а, следовательно, и к ложному градиенту магнитного поля (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с.74-79). Так, например, у образцовой меры магнитной индукции первого разряда, со стороной квадратичной катушки, которую обозначим через l, неоднородность воспроизводимого магнитного поля составляет примерно 1% на расстоянии 0,3l от центра этих катушек. Кроме того, незначительная ассиметрия датчиков относительно центра катушек компенсации приводит к ложному градиенту магнитной индукции. Таким образом, известное устройство не обеспечивает измерение слабой разности векторов магнитной индукции, а, следовательно, и малых значений градиента магнитной индукции при наличии сильного однородного магнитного поля, например, магнитного поля Земли, ориентированного перпендикулярно коллинеарным осям датчиков. Увеличение размеров катушек компенсации ослабляет влияние однородного магнитного поля, перпендикулярного коллинеарным осям датчиков, но увеличивает габариты магниточувствительного блока, состоящего из датчиков и катушек компенсации. Это ограничивает применение известного устройства, например, при измерении градиента магнитной индукции, когда упомянутый магниточувствительный блок должен носить человек, или при использовании данного технического решения в качестве дефектоскопа.
Задачей предлагаемого изобретения является создание градиентометра, исключающего влияние однородного магнитного поля на измерение градиента магнитной индукции при неидентичности чувствительностей и неколлинеарности осей датчиков градиентометра независимо от того, изменяется направление упомянутого поля к датчикам или нет. Это обеспечивает измерение с высокой точностью слабых сигналов разностей проекций векторов магнитной индукции, пропорциональных градиенту магнитной индукции. Поставленная задача решается за счет автоматической компенсации ложного сигнала разности проекций векторов магнитной индукции, пропорционального ложному градиенту магнитной индукции, обусловленного наличием и изменением направления к датчикам градиентометра однородного магнитного поля, например, геомагнитного поля при неидентичности чувствительностей и неколлинеарности осей магниточувствительных датчиков.
Предлагаемый градиентометр, содержащий генератор переменной ЭДС, три усилительно-преобразовательных блока, первые входы которых подключены к первому выходу генератора переменой ЭДС, два двухкомпонентных магниточувствительных датчика, одни оси которых коллинеарны, а вторые оси взаимно ортогональны, два резистора, две катушки компенсации, первый вывод одной из которых подключен через первый резистор к выходу первого усилительно-преобразовательного блока, а первый вывод второй катушки компенсации подключен через второй резистор к выходу второго усилительно-преобразовательного блока, второй вывод первой катушки компенсации подключен к общему контакту градиентометра, вторые входы первого и второго усилительно преобразовательных блоков подключены к первым сигнальным выходам векторов магнитной индукции соответственно первого и второго датчиков, ориентированных вдоль взаимно ортогональных осей упомянутых датчиков, второй вход третьего усилительно-преобразовательного блока подключен ко второму сигнальному выходу вектора магнитной индукции первого датчика, ориентированного вдоль коллинеарных осей этих датчиков, входы обоих датчиков подключены ко второму выходу генератора переменной ЭДС, и регистрирующий прибор, подключенный к выходу третьего усилительно-преобразовательного блока, снабжен четвертым усилительно-преобразовательным блоком, первый вход которого подключен к первому выходу генератора переменной ЭДС, а второй ко второму сигнальному выходу вектора магнитной индукции второго датчика, ориентированного вдоль коллинеарных осей обоих датчиков, третьим и четвертым резисторами, первый вывод третьего резистора подключен к первому выходу четвертого усилительно-преобразовательного блока, а второй ко второму выходу второй катушки компенсации, первые выводы обеих катушек компенсации подключены через четвертый резистор ко второму выходу четвертого усилительно-преобразовательного блока, первая и вторая катушки компенсации размещены соответственно на первом и втором датчиках, при этом оси упомянутых катушек совпадают с коллинеарными осями соответствующих датчиков.
Измерение в предлагаемом устройстве с помощью одного из датчиков однородного магнитного поля, направленного вдоль коллинеарных осей датчиков и компенсация его в другом датчике, а также выделение и компенсация ложного сигнала разности векторов магнитной индукции, ориентированных вдоль коллинеарных осей обоих датчиков, обусловленного неидентичностью чувствительностей датчиков, обеспечивает исключение влияния однородного магнитного поля, ориентированного вдоль коллинеарных осей датчиков, на результат измерения градиента магнитной индукции.
Измерение с помощью двух датчиков составляющих векторов магнитной индукции вдоль двух взаимно ортогональных осей этих датчиков обеспечивает выделение и автоматическую компенсацию ложного сигнала разности векторов магнитной индукции, обусловленного неколлинеарностью двух других осей этих датчиков, при наличии однородного магнитного поля, ориентированного перпендикулярно оси, коллинеарно которой должны быть ориентированы две оси датчиков градиентометра. В результате этого исключается влияние упомянутого однородного магнитного поля на результат измерения градиента магнитной индукции.
Следует отметить, что воспроизведение магнитной индукции, компенсирующей ложный сигнал разности векторов магнитной индукции, обусловленный неидентичностью чувствительностей и неколлинеарностью осей датчиков, осуществляется одной катушкой компенсации.
Таким образом, технический результат предлагаемого изобретения заключается в исключении влияния однородного магнитного поля, в частности геомагнитного поля на измерение градиента магнитной индукции при неидентичности чувствительностей и неколлинеарности осей датчиков градиентометра независимо изменяется или нет ориентация упомянутого однородного магнитного поля к датчикам.
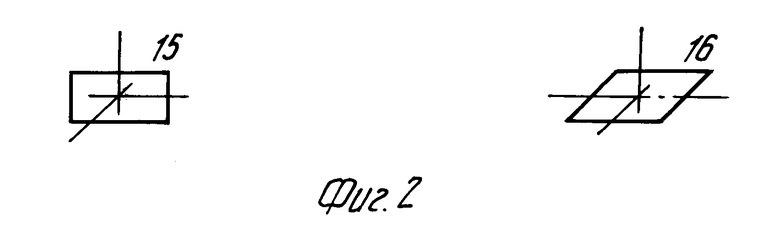
На фиг. 1 изображена структурная схема градиентометра; на фиг. 2 изображены сердечники магниточувствительных датчиков.
Предлагаемый градиентометр состоит (фиг. 1) из генератора переменной ЭДС 1, четырех усилительно-преобразовательных блоков 2-5, первые входы которых подключены к первому выходу генератора 1, двух двухкомпонентных магниточувствительных датчиков 6 и 7, одни оси которых коллинеарны, в частности, соосны с осью OY декартовой системы координат OXYZ, а вторые оси этих датчиков взаимно ортогональны, например, вторая ось датчика 6 параллельна оси OZ, а вторая ось датчика 7 параллельна оси ОХ, четырех резисторов 8-11, двух катушек компенсации 12-13 и регистрирующего прибора 14, подключенного к выходу блока 3. Первый вывод катушки 12 подключен через резистор 8 к выходу блока 2, а первый вывод катушки 13 подключен через резистор 9 к выходу блока 4. Второй вывод катушки 12 подключен к общему контакту градиентометра, а второй вывод катушки 13 подключен через резистор 10 к первому выходу блока 5, второй выход которого через резистор 11 подключен к первым выводам катушек 12 и 13. Вторые входы блоков 2 и 4 подключены к первым сигнальным выходам векторов магнитной индукции соответственно датчиков 6 и 7, ориентированных вдоль взаимно ортогональных осей упомянутых датчиков 6 и 7, то есть второй вход блока 2 подключен к выходу датчика 6, измеряющего вектор магнитной индукции, параллельный оси OZ, а второй вход блока 4 подключен к выходу датчика 7, измеряющего вектор магнитной индукции, параллельный оси ОХ. Вторые входы блоков 3 и 5 подключены ко вторым сигнальным выходам векторов магнитной индукции соответственно датчиков 6 и 7, ориентированных коллинеарно осям упомянутых датчиков 6 и 7, т.е. вторые входы блоков 3 и 5 подключены к выходам соответствующих датчиков 6 и 7, измеряющих вектора магнитной индукции соосные с осью OY декартовой системы координат OXYZ. Катушки 12 и 13 размещены соответственно на датчиках 6 и 7, при этом оси упомянутых катушек совпадают с коллинеарными осями соответствующих датчиков 6 и 7, т.е. оси катушек 12 и 13 соосны с осью OY.
Предлагаемый градиентометр работает следующим образом.
На входы (фиг. 1) обоих двухкомпонентных датчиков 6 и 7, у которых магниточувствительные элементы выполнены, например, в виде рамок или колец 15 и 16 (фиг. 2) с взаимно ортогональными плоскостями, подается с генератора 1 возбуждающее напряжение. В результате этого на первых сигнальных выходах векторов магнитной индукции каждого датчика 6 и 7 (фиг. 1) появляются напряжения второй гармоники, пропорциональные значениям векторов магнитной индукции, ориентированных по направлениям взаимно ортогональных осей этих датчиков (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с.55, рис. 27б). На вторых сигнальных выходах векторов магнитной индукции каждого датчика 6 и 7 появляются напряжения второй гармоники, пропорциональные значениям векторов магнитной индукции, ориентированных по направлению коллинеарных осей этих датчиков. Таким образом, сигнал с первого выхода датчика 6, пропорциональный вектору магнитной индукции, перпендикулярному плоскости рамки или кольца 16 (фиг. 2) датчика 7 (фиг. 1), т.е. сигнал с первого выхода датчика 6, пропорциональный вектору магнитной индукции, параллельному оси OZ, подается на второй вход блока 2, а сигнал с первого выхода датчика 7, пропорциональный вектору магнитной индукции, перпендикулярному плоскости рамки или кольца 15 (фиг. 2) датчика 6 (фиг. 1), т.е. сигнал с первого выхода датчика 7, пропорциональный вектору магнитной индукции, параллельному оси ОХ, подается на второй вход блока 4. Сигналы же со вторых выходов датчиков 6 и 7, пропорциональные векторам магнитной индукции, ориентированных по направлению коллинеарных осей этих датчиков, т.е. соосно с осью OY, подаются соответственно на вторые входы блоков 3 и 5. Для выпрямления сигналов с блоков 2 и 5, полярность которых менялась бы с изменением направления вектора магнитной индукции на угол 180o, на первые входы упомянутых блоков 2 и 5 подается напряжение с первого выхода генератора 1. Выходной сигнал с блока 5 через резистор 10 подается на последовательно и согласно включенные катушки компенсации 12 и 13. В результате этого канал, состоящий из датчика 7 с катушкой 13 и блока 5, охвачен глубокой отрицательной обратной связью по магнитному полю в направлении оси OY, действующему на датчик 7. Катушка 12, как и катушка 13, воспроизводит магнитное поле равное по величине и противоположное по направлению магнитному полю, измеренному датчиком 7, поэтому сигнал с выхода блока 3 пропорционален разности векторов магнитной индукции соосных с осью OY, измеренных датчиками 6 и 7. Однако даже при неидентичности постоянных катушек 12 и 13 равной 2•10-5, что составляет 0,002% в магнитном поле Земли 5•104 нТл, действующим вдоль оси OY, погрешность измерения разности магнитной индукции составляет ±1 нТл. Для исключения этого ложного сигнала напряжение со второго выхода блока 5, пропорциональное вектору магнитного поля соосного с осью OY, через резистор 11 подается на катушку 12. Резистор 11 обеспечивает такой ток в катушке 12, чтобы она воспроизводила магнитное поле равное по величине и противоположное по направлению ложному разностному сигналу магнитного поля, обусловленного наличием однородного магнитного поля, направленного вдоль оси OY, и неидентичностью постоянных катушек 12 и 13. Полярность напряжения со второго выхода блока 5 выбирается в зависимости от отношения постоянных катушек 12 и 13. Так, например, полярность напряжения со второго выхода блока 5 выбирается отрицательной, если отношение постоянной катушки 12 к постоянной катушке 13 больше единицы. Следовательно, в предлагаемом устройстве исключается влияние однородного магнитного поля, действующего по направлению оси OY, на измерение разности векторов магнитной индукции по направлению упомянутой оси, пропорциональной градиенту магнитного поля.
Выходные сигналы с блоков 2 и 4 через соответствующие резисторы 8 и 9 поступают на катушку компенсации 12. Резистор 8 обеспечивает такой ток в катушке 12, чтобы она воспроизводила магнитное поле равное по величине и противоположное по направлению ложному разностному сигналу магнитного поля, обусловленного наличием однородного магнитного поля, направленного параллельно оси OZ, и несоосностью осей датчиков 6 и 7 с осью OY. Резистор 9 обеспечивает такой ток в катушке 12, чтобы она воспроизводила магнитное поле равное по величине и противоположное по направлению ложному разностному сигналу магнитного поля, обусловленного наличием однородного магнитного поля, направленного параллельно оси ОХ, и несоосностью осей датчиков 6 и 7 с осью OY. Следовательно, в предлагаемом устройстве исключается влияние однородного магнитного поля, действующего по направлению перпендикулярно оси OY, на измерение разности векторов магнитной индукции по направлению упомянутой оси OY, пропорциональной градиенту магнитного поля.
Для реализации предлагаемого градиентометра могут быть использованы четыре однокомпонентных феррозондовых датчика с сердечниками типа "Рейс-трек" или два двухкомпонентных феррозондовых датчика с кольцевыми сердечниками, генератор переменной ЭДС и усилительно-преобразовательный блок, приведенные в работе (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с. 55, рис.2.7а,б, с.127-138, рис.53-56).
Таким образом, предлагаемый градиентометр исключает влияние однородного магнитного поля, в частности, геомагнитного поля на измерение градиента магнитной индукции при неидентичности чувствительностей и неколлинеарности осей датчиков градиентометра независимо изменяется или нет ориентация упомянутого однородного магнитного поля к датчикам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТР | 1994 |
|
RU2091807C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2138019C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1994 |
|
RU2124736C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2151405C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1993 |
|
RU2077733C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
Сущность изобретения: измерение с помощью одного из датчиков однородного магнитного поля, направленного вдоль коллинеарных осей датчиков и компенсация его в другом датчике, а также выделение и компенсация ложного сигнала разности векторов магнитной индукции, ориентированных вдоль коллинеарных осей обоих датчиков, обеспечивает исключение влияния однородного магнитного поля, ориентированного вдоль указанных осей, на результат измерения градиента магнитной индукции. Измерение с помощью двух датчиков составляющих векторов магнитной индукции вдоль двух взаимно ортогональных осей этих датчиков обеспечивает компенсацию ложного сигнала разности векторов магнитной индукции, обусловленного неколлинеарностью двух других осей этих датчиков в случае, если имеется однородное магнитное поле, ориентированное перпендикулярно оси, коллинеарно которой должны быть ориентированы две оси датчиков. В результате этого исключается влияние и этого однородного магнитного поля на результат измерения. 2 ил.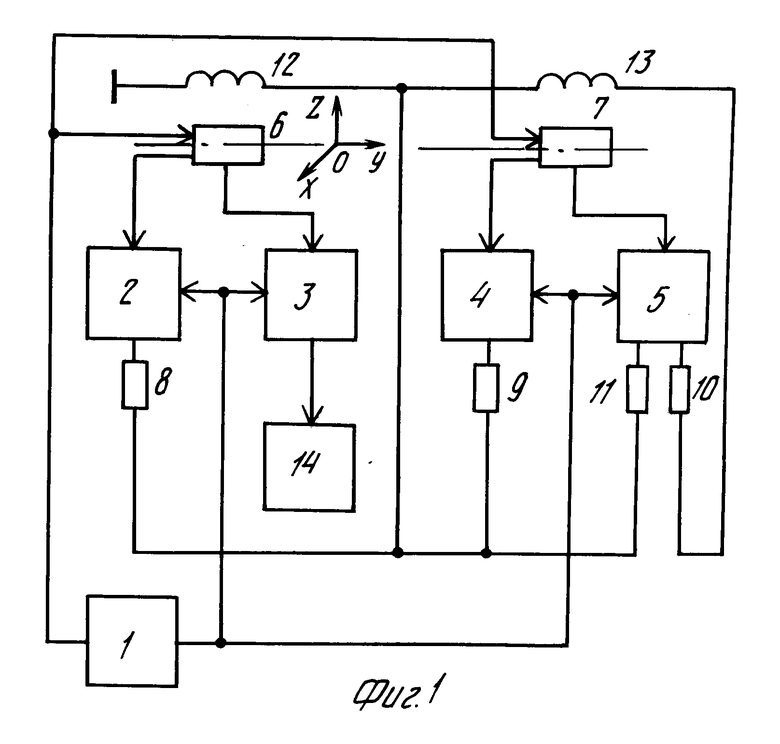
Градиентометр, содержащий генератор переменной ЭДС, три усилительно-преобразовательных блока, первые входы которых подключены к первому выходу генератора переменной ЭДС, два двухкомпонентных магниточувствительных датчика, одни оси которых коллинеарны, а вторые оси взаимно ортогональны, два резистора, две катушки компенсации, первый вывод одной из которых подключен через первый резистор к выходу первого усилительно-преобразовательного блока, а первый вывод второй катушки компенсации подключен через второй резистор к выходу второго усилительно-преобразовательного блока, второй вывод первой катушки компенсации подключен к общему контакту градиентометра, вторые входы первого и второго усилительно-преобразовательных блоков подключены к первым сигнальным выходам векторов магнитной индукции соответственно первого и второго датчиков, второй вход третьего усилительно-преобразовательного блока подключен к второму сигнальному выходу вектора магнитной индукции первого датчика, ориентированного вдоль коллинеарных осей датчиков, входы обоих датчиков подключены к второму выходу генератора переменной ЭДС, и регистрирующий прибор, подключенный к выходу третьего усилительно-преобразовательного блока, отличающийся тем, что он снабжен четвертым усилительно-преобразовательным блоком, первый вход которого подключен к первому выходу генератора переменной ЭДС, а второй к второму сигнальному выходу вектора магнитной индукции второго датчика, ориентированного вдоль коллинеарных осей обоих датчиков, третьим и четвертым резисторами, первый вывод третьего резистора подключен к первому выводу четвертого усилительно-преобразовательного блока, а второй к второму выводу второй катушки компенсации, первые выводы обеих катушек компенсации подключены через четвертый резистор к второму выходу четвертого усилительно-преобразовательного блока, первая и вторая катушки компенсации размещены соответственно на первом и втором датчиках, при этом оси упомянутых катушек совпадают с коллинеарными осями соответствующих датчиков.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 3488579, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Афанасьев Ю.В | |||
| Феррозондовые приборы | |||
| - Л.: Энергоатомиздат, 1986, с.66 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для измерения градиента магнитного поля | 1976 |
|
SU662885A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
