(54) Ы1ЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО
гайкой механизма перемещения, ервый конец ходового винта скрепен с третьей индикаторной пластиой, второй конец винта соединен с ервым концом третьего гибкого тросика, второй конец которого соедиен -с третьим роликом, резьбовая пора поворотно установлена на корпусе, второй, третий и четвертый указатели расположены у соответствующих шкал, которые нанесены на корпус.
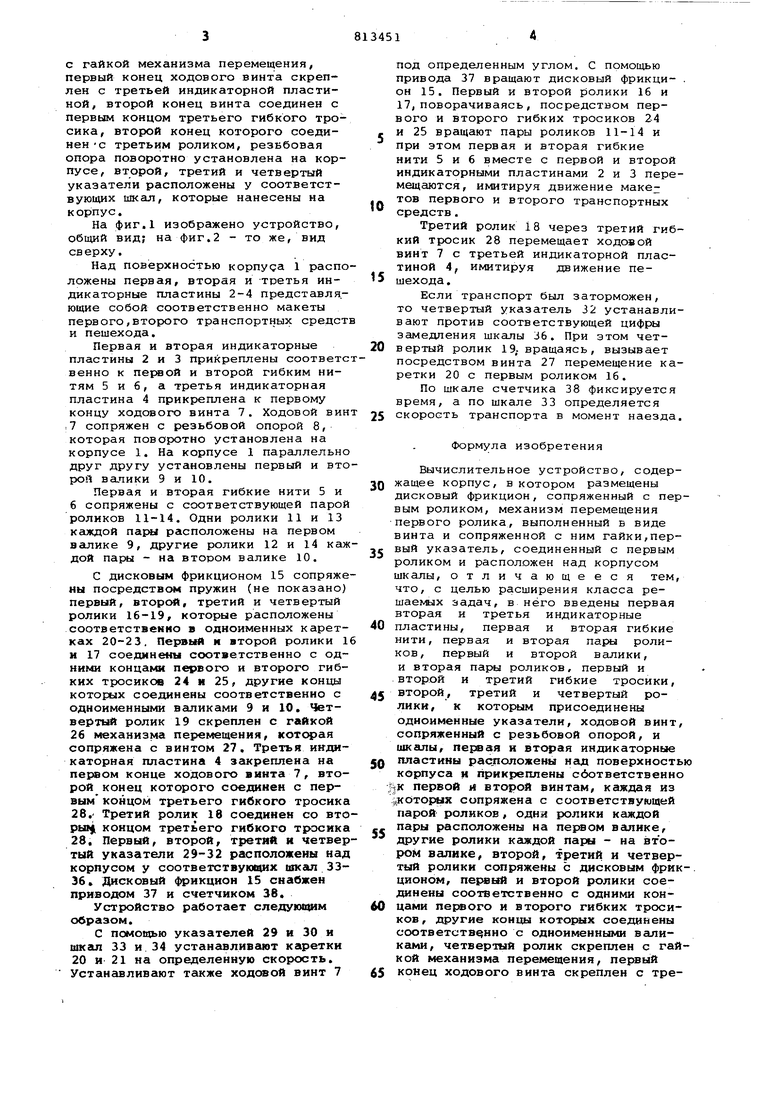
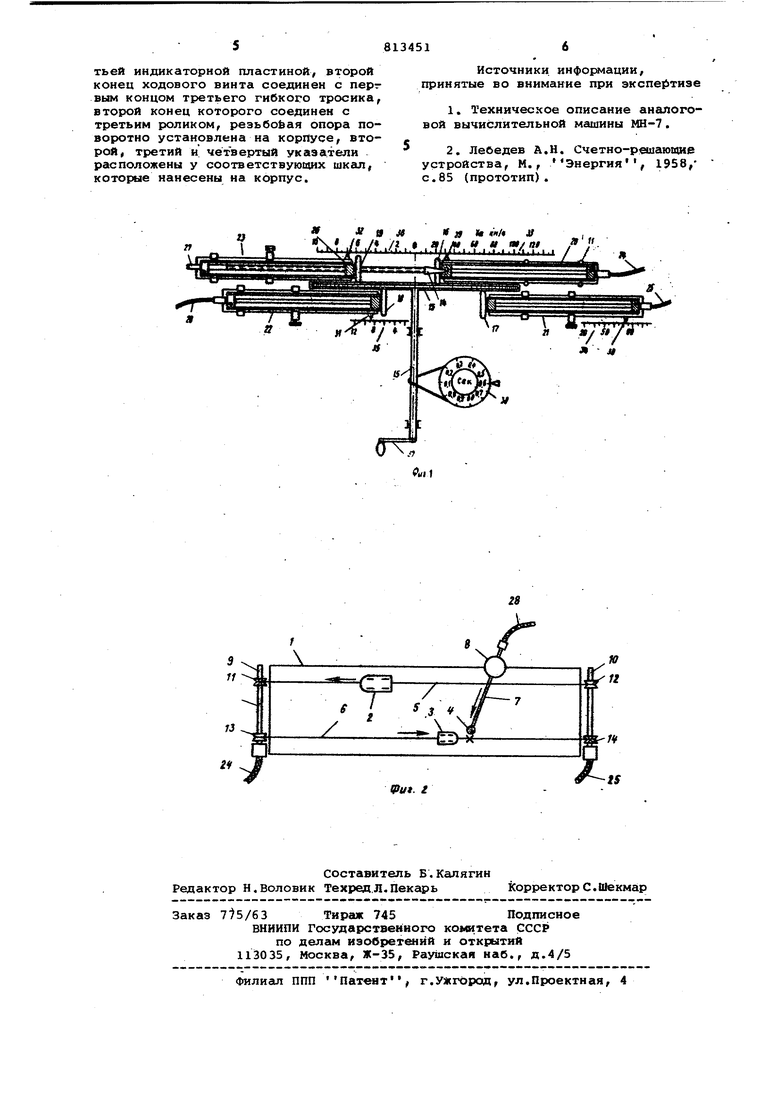
На фиг.1 изображено устройство, общий вид; на фиг.2 - то же, вид сверху.
Над поверхностью корпуда 1 расположены первая, вторая и -третья индикаторные пластины 2-4 представляющие собой соответственно макеты первого,второго транспортных средств и пешехода.
Первая и вторая индикаторные пластины 2 и 3 прикреплены соответственно к первой и второй гибким нитям 5 и б, а третья индикаторная пластина 4 прикреплена к первому концу ходового винта 7. Ходовой винт 7 сопряжен с резьбовой опорой 8, которая поворотно установлена на корпусе 1. На корпусе 1 параллельно друг другу установлены первый и второй валики 9 и 10.
Первая и вторая гибкие нити 5 и 6 сопряжены с соответствующей парой роликов 11-14. Одни ролики 11 и 13 ксокдой пара расположены на первом валике 9, другие ролики 12 и 14 каждой пары - на втором валике 10.
С дисковым фрикционом 15 сопряжены посредством пружин (не показано) первый, второй, третий и четвертый ролики 16-19, которые расположены соответственно в одноименных каретках 20-23. Первый и второй ролики 16 и 17 соединены соответственно с одними концаьш первого и второго гибких тросиков 24 н 25, другие концы которых соединены соответственно с одноименными валиками 9 и 10. Четвертый ролик 19 скреплен с гайкой 26 механизма перемещения, сопряжена с винтом 27, Третья индшкаторная пластина 4 закреплена на первом конце ходового винта 7, второй конец которого соединен с первым концом третьего гибкого тросика 28. Третий ролик 18 соединен со втоpH f концом третьего гибкого тросика 28, Первый, второй, третий и четвертый указатели 29-32 расположены над корпусом у соответствуюе(их шкал 3336. Дисковый фрика.ион 15 снабжен приводом 37 и счетчиком 38,
Устройства работает следуюа м образом.
С помо1чью указателей 29 и 30 и шкал 33 и 34 устангшливают каретки 20 и 21 на определенную скорость. Устанавливают также ходсжой винт 7
под определенным углом. С помощью привода 37 вращают дисковый фрикци- . он 15. Первый и второй ролики 16 и 17, поворачиваясь, посредством первого и второго гибких тросиков 2-4 и 25 вращают пары роликов 11-14 и при зтом первая и вторая гибкие нити 5 и 6 вместе с первой и второй индикаторными пластинами 2 и 3 перемещаются, имитируя движение макетов первого и второго транспортных
средств.
Третий ролик 18 через третий гибкий тросик 28 перемещает ходовой винт 7 с третьей индикаторной пластиной 4, имитируя движение пе5 шехода.
Если транспорт был заторможен, то четвертый указатель 32 устанавливают против соответствующей цифрам замедления шкалы 36. При этом чет0 вертый ролик 19,- вращаясь, вызывает посредством винта 27 перемещение каретки 20 с первым роликом 16.
По шкале счетчика 38 фиксируется время, а по шкале 33 определяется
5 скорость транспорта в момент наезда.
Формула изобретения
Вычислительное устройство, содерQ жащее корпус, в котором размещены
дисковый фрикцион, сопряженный с первым роликом, механизм перемещения первого ролика, выполненный в виде винта и сопряженной с ним гайки,перC вый указатель, соединенный с первым роликом и расположен над корпусом шкалы, отличающееся тем, что, с целью расширения класса решае их задач, в него введены первая вторая и третья индикаторные
0 пластины, первая и вторая гибкие нити, первая и вторая пары роликов, первый и второй валики, и вторая пары роликов, первый и второй и третий гибкие тросики,
5 второй, третий и четвертый ролики, к которым присоединены одноименные указатели, ходовой винт, сопряженный с резьбовой опорой, и шкалы, перва я и вторая индикаторные
Q пластины расположены наш поверхностью
корпуса н прикреплены сбответственно |iK первой X второй винтам, каждая из .моторах сопряжена с соответствующей парой роликов, ОДНИ ролики каждой пары расположены на первом валике, другие ролики каждой пары - на втором валике, второй, третий и четвертый ролики сопряжены с дисковым фрикционом, первьй) и второй ролики соединены соответственно с одними кон0 цами и второго гибких тросиков, другие концы которых соединены соответственно с одноименными валиками, четвертый ролик скреплен с гайкой механизма перемещения, первый
5 конец ходового винта скреплен с третьей индикаторной пластиной, второй конец ходового винта соединен с перг вым концом третьего гибкого тросика, второй конец которого соединен с третьим роликом, реэьбоЬая опора поворотно установлена на корпусе, второй, третий и. чётвертый указатели расположены у соответствуюьшх шкал, которые нанесены на корпус.
Источники, информации, принятые во внимание при экспе1Ьтизе
1.Техническое описание аналоговой вычислительной машины МН-7.
2.Лебедев й.Н. Счетно-решающие устройства, М., Энергия , 1958, с.85 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ КОВРОТКАЦКИЙ СТАНОК | 1991 |
|
RU2057826C1 |
| Устройство для неразрушающего контроля поверхности электропроводящих объектов | 1989 |
|
SU1682903A1 |
| Прибор для определения оптимальной длительности долбления в процессе бурения | 1950 |
|
SU104730A1 |
| ВЫРАВНИВАЮЩЕЕ УСТРОЙСТВО ФАРЫ | 2009 |
|
RU2482983C2 |
| СЕЯЛКА ДЛЯ РАВНОМЕРНОГО ШИРОКОПОЛОСНОГО ПОСЕВА СЕМЯН ОВОЩНЫХ КУЛЬТУР | 2014 |
|
RU2586163C2 |
| Устройство для измерения диаметра котловых полостей | 1990 |
|
SU1744421A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| МЕХАНИЗМ ИНДИКАЦИИ ПЕРИОДА ВРЕМЕНИ ГИБКИМ ИНДИКАТОРНЫМ ЭЛЕМЕНТОМ И ЧАСЫ, СОДЕРЖАЩИЕ ТАКОЙ МЕХАНИЗМ | 2016 |
|
RU2628713C1 |
| 3D-ПРИНТЕР | 2017 |
|
RU2649738C1 |
IPut.
