(54) СИСТЕМА ОДЧИНЕННОГО РЕГУЛИРОВАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Электропривод с раздельным управлением | 1989 |
|
SU1817220A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления | 1984 |
|
SU1354377A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронной машины | 1983 |
|
SU1252890A1 |
| Электропривод с подчиненным регулированием параметров | 1981 |
|
SU997215A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| Устройство для управления частотнорегулируемым асинхронным электроприводом | 1979 |
|
SU862344A1 |
| Электропривод с подчиненным регулированием параметров | 1979 |
|
SU896733A1 |
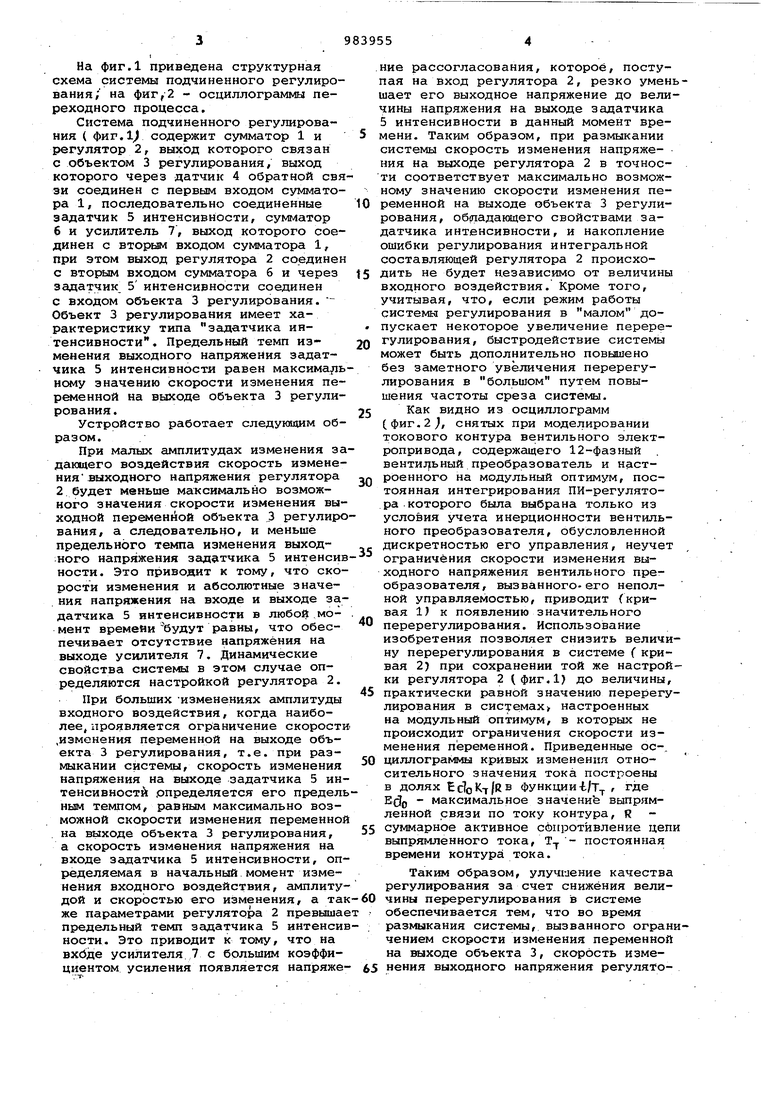
Изобретениеотносится к электротехнике, в частности к системам автоматического управления, в которы происходит ограничение скорости изме нения переменной, и может-быть испол зовано там, где требуется исключить накопление ошибки управления за время размыкания системы, обусловленное ограничением скорости изменения пере менной. Известна система подчиненного рег лирования, содержащая последовательн соединенные сумматор, регулятор, объ ект регулирования, датчик обратной связи, выход которого соединен с входом сумматора . Наиболее близкой по технической сущности к изобретению является система подчиненного регулирования, содержащая сумматор и регу.го1тор, выход которого связан с объектом регулирования г выход которого чере|3 датчик обратной связи соединен с первым входом сумматора 2 . Общим для всех систем подчиненног регулирования является наличие звена или контура, имеющих ограниченную скорость изменения выходной переменной, которые могут быть представлены в виде эквивалентного условного объ- екта .регулирования, обладающего характеристикой типа задатчика интенсивности . Для поддержания высокой точности регулирования выходной переменной и обеспечения требуемой частоты среза системы передаточная функция регулятора содержит интегральную составляющую (регуляторы типа И, ИП, ПИ, В известных системах ограничение скорости изменения переменной в замкнутом контуре тока приводит к появлению значительного перерегулирования. Устранение перерегулирования в системе достигается путем ограничения частоты среза, т.е. путем снижения быстродействия. Целью изобретения яв.пяется повышение качества системы подчиненного регулирования. Поставленная цель достигается тем, что в систему введены последовательно соединенные задатчик интенсивности, второй сумматор и усилитель, выход которого соединен с вторым входом cjnywaTopa, при этом выход регулятора соединен с вторым входом второго сумматора и через задатчик интенсивности соединен с входом объекта регулирования. На фиг.1 приведена структурная схема системы подчиненного регулирования; на фиг,2 - осциллограммы переходного процесса. Система подчиненного регулирования ( фиг. содержит сумматор 1 и регулятор 2, выход которого связан с объектом 3 регулирования, выход которого через датчик 4 обратной свя зи соединен с первым входом сумматора 1, последовательно соединенные задатчик 5 интенсивности, 6 и усилитель 7, выход которого соединен с вторщм входом сумматора 1, при этом выход регулятора 2 соединен с вторым входом сумматора б и через задатчик 5 интенсивности соединен с входом объекта 3 регулирования. - Объект 3 регулирования имеет характеристику типа задатчика интенсивности , Предельный темп изменения выходного напряжения задатчика 5 интенсивности равен максима/гь ному значению скорости изменения переменной на выходе объекта 3 регулирования. Устройство работает следующим образом. При малых амплитудах изменения за дающего воздействия скорость изменения выходного напряжения регулятора 2 будет меньше максимально возможного значения скорости изменения выходной переменной объекта 3 регулиро вания, а следовательно, и меньше предельного темпа изменения выходного напряжения задатчика 5 интенсив ности. Это приводит к тому, что скорости изменения и абсолютные значения напряжения на входе и выходе задатчика 5 интенсивности в любой момент времени будут равны, что обеспечивает отсутствие напряжения на выходе усилителя 7. Динамические свойства системы в этом случае определяются настройкой регулятора 2. При больших -изменениях амплитуды входного воздействия, когда наиболее, проявляется ограничение скорост .изменения переменной на выходе объекта 3 регулирования, т.е. при размыкании систе№1, скорость изменения напряжения на выходе задатчика 5 ин тенсивности определяется его предел ным темпом, равным максимально возможной скорости изменения переменно на выходе объекта 3 регулирования, а скорость изменения напряжения на входе задатчика 5 интенсивности, оп ределяемая в начальный момент изменения входного воздействия, амплиту дой и скоростью его изменения, а та же параметрами регулятора 2 превыша предельный темп задатчика 5 интенси ности. Это приводит к тому, что на вхбде усилителя 7 с большим коэффициентом усиления появляется напряже ние рассогласования, которое, поступая на вход регулятора 2, резко уменьает его выходное напряжение до величины напряжения на выходе задатчика 5 интенсивности в данный момент времени. Таким образом, при размыкании системы скорость изменения напряжения на выходе регулятора 2 в точности соответствует максимально возможному значению скорости изменения переменной на выходе объекта 3 регулирования, обладающего свойствами задатчика интенсивности, и накопление ошибки регулирования интегральной составляющей регулятора 2 происходить не будет независимо от величины входного воздействия. Кроме того, учитывая, что, если режим работы системы регулирования в малом допускает некоторое увеличение перерегулирования, быстродействие системы может быть дополнительно повьлиено без заметного увеличения перерегулирования в большом путем повышения частоты среза системы. Как видно из осциллограмм (фиг. 2, снятых при моделировании токового контура вентильного электропривода, содержащего 12-фазный вeнтиJ lьный преобразователь и настроенного на модульный оптимум, постоянная интегрирования ПИ-регулятора .которого была выбрана только из условия учета инерционности вентильного преобразователя, обусловленной дискретностью его управления, неучет ограничения скорости изменения выходного напряжения вентильного преобразователя, вызванного-его неполной управляемостью, приводит (кривая 1) к появлению значительного перерегулирования. Использование изобретения позволяет снизить величину перерегулирования в системе ( кривая 2) при сохранении той же настройки регулятора 2 (фиг.1) до величины, практически равной значению перерегулирования в системах настроенных на модульный оптимум, в которых не происходит ограничения скорости изменения переменной. Приведенные ос-, циллограммы кривых изменения относительного значения тока построены в долях Еdo в функции 1/Т , где E(Jjj - максимальное значение выпрямленной связи по току контура, R суммарное активное сопротивление цепи выпрямленного тока, Т-,. - постоянная времени контура тока. Таким образом, улучшение качества регулирования за счет снижения величины перерегулирювания в системе обеспечивается тем, что во время размыкания системы, вызванного ограничением скорости изменения переменной на выходе объекта 3, скорость изменения выходного напряжения регулятоpa 2 ограничивается величиной, равной максимально возможной скорости, измеиения переменной на выходе объекта регулирования, в результате чего ликвидируется увеличение оишбки регут йирования во время размыкания систекм поскольку изобретение позволяет производить настройку регулятора без учета свойств ограничения скорости изменения переменной на выходе объек та регулирования, то оно обеспечивает, по сравнению, с известным устройством повышение быстродействия. Формула изобретения Система подчиненного регулирования, содержащая последовательно соединенные сумматор и регулятор, выход которого связан с объектом регулирования, выход которого через датчик обратной связи соединен с первым входом сумматора,. отличающаяся тем, что, с целью повьшения качества регулирования, в нее введены последовательно соединенные задатчик интенсивности, второй сумматор и усилитель, выход которого.соединен с вторым входом сукматора, при -этом выход регулятора соединен с вторая входом второго сумматора и через задатчик интенсивности - с входом Гобъекта регулирования,Источники информации, . принятые во внимание при экспертизе 1.Лебедев Е.Д. и др. Управление вентильными электроприводами постоянного тока. Н., Энергия, 1970, с.102 2.Там е, с.43
/77л-/f
,/
