(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
оптически соединенный через призму соединенную с приводом, с другим входом блока совпгщёний, выход которого подключен к первому входу формирователя временных интервалов, второй вход которого соединен с выходом нулевого положения, выход генератора счетных импульсов подключен к приводу, соедщненному с датчиком .нулевого положения и к первому входу, первого ключевого элемента, второй вход которого соединен с выходом формирователя временны интервалов, выходы счетчика подключены к одним чд входов блока сравнения, к другим входам которого подключен регистр памяти, выход блока сравнения соединен с датчиксж нулевого положения, введены дополнителБный формирователь временного интервала/ форьшрователи сигналов по переднему и заднему фонтам, второй ключевой элемент и второй счетчик, вхоя дополнительного формирователя временного интервала соединены с выходом датчика нулевого положения, а выход дополнительного формировав теля ври енного интервала соединенс входамиi, формирователей сигналов по переднему и заднему фронтам, с входом второго ключевого элемента и третьим входом первого ключевого элемента,выход которого соединен с одним из входов второго счетчика, выход формирователя сигнала по заднему онту соединен с управляющи Ёходом блока сравнения, выход формироватэля сигналов по переднему фронту (Соединен с первым входом первого счетчика и с другим входом второго счетчика, выход генератора (Четных импульсов соединен с вторым входом второго ключевого элемента, выход которого соединен с вторым входом первого счетчика.
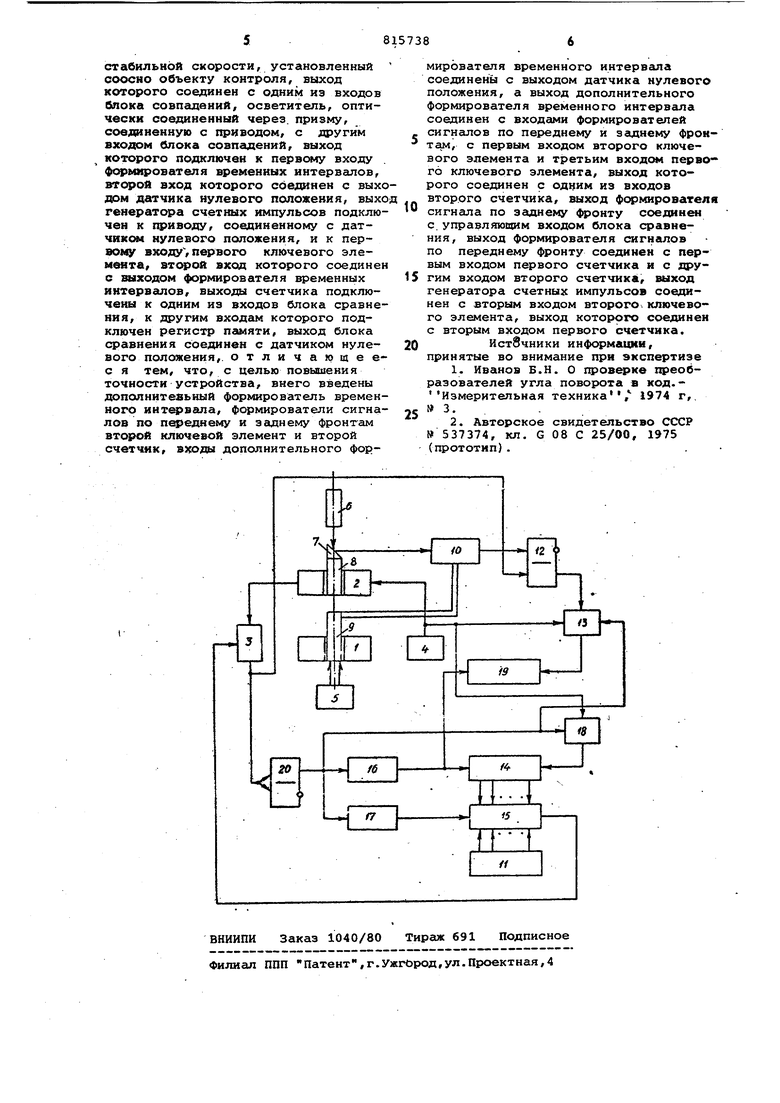
На чертеже приведена блок-схема щ едлагаемого устройства. Устройство содержит объект 1 контроля, привод 2 стабильной скодаюсти с датчиком 3 нулешах положений, генертор 4 стабильной частоты, привод 5 оси объекта коитрояя, осветитель б,, призму 7, соединейную с валом 8 ось 9 объекта контроля, блок 10 сов-. падений, регистр 11 памяти, формирователь 12 временных интервалов, ключевой элемент 13, счетчик 14,бло 15 сравнения, Ф«ч вйрователи 16 и 17 сигналов по переднему и заднему фронту соответственно, ключевой элемент 18,счетчик 19, формирователь 2 временного интервала.
Устройство работает следующим образом.
При включении привода 2 стабильной сксчрости, установленного соосно с объектом 1 контроля, световой поток от осветителя б через призму 7 совершает вращательное движение в
плоскости,перпендикулярной оси вращения вала привода 2. В той же полости с помощью привода 5 осуществляемсяповорот на некоторый уголо, блока 10 совпаден ий, жестко связанного с осью объекта контроля. В процессе работы устройства датчик 3 нулевых положений и блок 10 формируют выходные сигналы, в результате чего на выходе формирователя 20 формируется временный , соответствукнций повороту вала привода 2 на 36оо, а на выходе формирователя 12 - временный интервал, соответствующий значению измеряемого угла 2 п . Заполнение полученных- временных интервалов производится генератором 4 через соответствующие ключевые элементы 13 и 18, результаты записываются в счетчиках 14 и 19.Импульс с выхода формирователя 20 разршиает запись числа в счетчик 19 одновременно с записью соответствующего числа в счетчик 14. Установка обоих счетчиков в нулевое состояние производится сигналом с выхода, формирователя 16 по переднему фронту, сигнала с первого выхода формирователя 20, что исключает возможность суммирования результатов, полученных в различных циклах измерения.
По заднему фронту сигнала с формирователя 20 формирователь 17 формирует импульс опроса на блок 15 сравнения, который сравнивает число записанное в. счетчике 14 и соответствующее реальной скорости вргидения Wjj+itt) вала привода 2 за один оборот с расчетным значением скорости о/ записанным в регистре 11. При AcJ : О сигнал на выходе блока 15 сравнения не формируется и устройство работает в соответствии с описанным принципом. При переходе составляЮ1а|ей ди) через нуль на выходе блока 15 появляется постоянный сигнгш, который блокирует датчик 3 нулевых положений. Отсутствие сигналов с вЬгхода датчика 3 отключает от работы всю логическую часгрь устройства, при этом в счетчике 19 фиксируется число, соответствующее точному значению измед1яемого углао ц.
Таким образом, принцип действия предлагаемого устройства для измерения угловых перемещений основан на определении момента перехода через нуль нестабильной составлякицей скорости вращения вала привода стабильной скорости и снятии отсчета о значении измеряемого угла.Полученная измерительная информация, являясь оптимальной с точки зрения точности, не требует необоснованног увеличения времени измерения.
Формула изобретения
УЬтройство для измерения угловых перемещеглй, содержащее привод
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы преобразователей угол-код | 1975 |
|
SU537374A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1976 |
|
SU641490A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Весоизмерительное устройство | 1988 |
|
SU1569578A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416935A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Цифровое устройство для обработки информации частотных датчиков | 1984 |
|
SU1239622A1 |
| Устройство для измерения погрешности преобразователя угла в код | 1976 |
|
SU652601A1 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1981 |
|
SU1106985A1 |
