Изобретение относится к весоизме- рительной технике и может быть ис - пользовано для учета суммарного веса объектов на конвейера.
Целью изобретения явттяется повышение точности учета суммарного веса единичных объектов, расширение функциональных возможностей устройства.
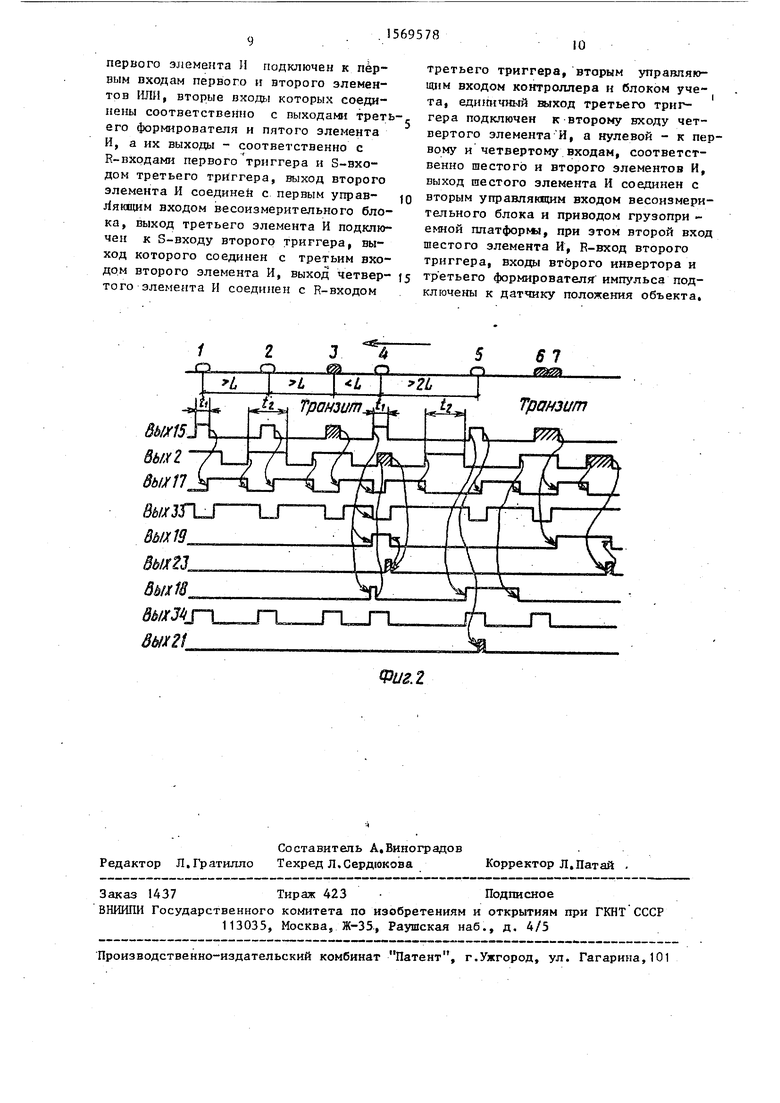
На фиг.1 показана блок-схема устройства; на фиг, 2 - временные диаграммы его работы.
Устройство содержит грузоприемную платформу 1, первый датчик 2 положения объекта, весоизмерительный блок 3, задатчик 4, счетчик 5 веса п-го объекта, счетчик 6 веса (n-l)-ro объекта,счетчик 7 суммарного веса, блок 8 индикации, блок 9 учета, блок 10 сравнения, мультиплексор 11, блок 12 учета отклонения веса объекта, блок 13 задающих генераторов, контроллер 14, второй датчик 15 положения объекта, блок 16 контроля интервалов, состоящий из трех триггеров 17-19, шести элементов И 20-25, двух ИЛИ 26- 27, трех формирователей 28-30 импульсов и инверторов 31-33, а также расширителя 34 импульсов.
Устройство работает следующим
образом.
При прохождении первого объекта под датчиком 15 положения он формирует импульс, длительность которого
равна времени нахождения объекта под датчиком t1 (фиг.2,вых„I5).
Этот импульс через инвертор 31 и формирователь 28 по заднему фронту установит в состояние 1 триггер 17 (фиг02,выха 17). В состояние О триггер 17 установится по переднему фронту импульса от датчика 2 положения через формирователь 30 и элемент ИЛИ 26, а также по выходному сигналу элемента И 20, Если интервал движения объектов не менее расстояния между датчиками 15 и 2 положения(на выходе элемента И 20 сигнал отсутствует и триггер 19 останется в состоянии О, обеспечивая прохождение сигнала от датчика 2 положения через элемент И 25 на второй управляющий вход весоизмерительного блока 33 Это сигнал (Брутто) запустит привод грузоподъемной платформы 1 на остано объекта, а весоизмерительный блок 3 - на взвешивание платформы совместно с объектом.
Время нахождения объекта на платформе под датчиком 2 положения:
2 ОСТ+ Цеп ИЗм+ сх 3t, ,
где tOCT- время на останов объекта; t VCn- время на успокоение платформы;
Ьцзм- время на измерение; . t сх - время схода объекта.
Расстояние между датчиками положе- иия:
L V xt
2
где
V - скорость движения ленты транспортера.
Сигналом с выхода датчика 2 положения осуществляется запуск блока 13 Задающих генераторов и контроллера 14 (по первому управляющему входу) на передачу информации о весе объекта в счетчики 5-7, Формируемая блоком 3 последовательность импульсов, число которых (Р) соответствует весу объекта, через контроллер 14 заносится в счетчик 5 n-го объекта,, При этом блок задающих генераторов 13 вырабатывает последовательность импульсов f, равную емкости счетчика 5 которая осуществляет перенос информации через контроллер 14 из счетчика 5 в счетчик 6 (n-l)-ro объекта и счетчик 7 суммарного веса. При наличии сигнала от датчика 2 информация о весе n-го объекта с выхода счетчика 5 поступит через мультипликатор 11 в блок 8 индикации и блок 9 учета а также в схему 12 учета отклонения веса объекта, которая при нарушении границ допустимого веса объекта выдаст в блок 9 учета сигнал Макс0 или Мин., При отсутствии сигнала от датчика 2 (нет на платформе) информация о суммарном веса с выхода счетчика 7 через мультиплексор 11 поступит в блоки 8 и 9, а также в схему 10 сравнения, которая при достижении в счетчике 7 величины задания веса, хранимого в задат- чике 4, выдаст в блок 9 учетный сигнал.
Сокращение интервала между объектами 3 и 4 (фиг.2) менее расстояния L, обеспечит приход импульса от датчика 15 положения (в момент прохождения под ним объекта 4) на второй вход элемента И 20, при установке триггера 17 в состоя:ше 1, На выходе элемента И 20 формируется импульс, устанавливающий через элемент ИЛИ 26 триггер 17 в состояние О, а триггер 19 через элемент ИЛИ 27 в состояние 1 (фиг,2,вых 1 7 и 19), Триггер 19 блокирует прохождение через элемент И 25 импульса от дат- чика 2 положения на запуск системы торможения и взвешивания. При этом
объект 3 (фиг,2) проходит через грузоподъемную платформу 1 транзитом. Сигнал 1 с единичного выхода триггера 19 поступает на вход элемента И 23, на другой вход которого через инвертор 32 поступает сигнал от датчика 2 положения. При сходе объекта 3 с платформы на выходе элемента И 2 3
Формируется импульс (-фиг.2,вых.23), который устанавливает в состояние О триггер 19 и запускает контрол- лер 14 по второму управляющему входу на перепись последовательностью им5 пульсов f информации через контроллер 14 со счетчика 6 (п-1)тго объекта в счетчик 7 суммарного веса. Таким образом, в счетчик 7 суммарного веса заносится теоретический вес тран0 знтного мешка. Импульс с выхода элемента И 23 также поступит в блок 9 учета с целью регистрации нарушения интервала движения объектов,
При увеличении интервала между
5 перемещающимися по конвейеру объектами 4 и 5 (фиг,2) более 2L импульс, сформированный формирователем 29 по переднему фронту сигнала от датчика 15 положения (в момент прохождения
0 под ним пятого объекта), поступает на вход эпемента И 220 При наличии на другом входе элемента И 22 сигнала 1, поступающего через инвертор 32 от датчика 2 положения при отсут5
ствии под ним объекта, импульс с его
0
выхода установит в состояние 1 триггер 18.
Сигнал 1 с выхода триггера 18 поступит на первый вход элемента И 21. При поступлении единичных сигналов с выхода расширитачя 34 (расширенный импульс с пятого объекта), инверсных выходов датчика 15 (выход инвертора 31) и триггера 19 на осс тальные входы элемента И 21, на его выходе формируется импульс (фиг,2, вых.21), запускакщий по первому управляющему входу весоизмерительный блок 3 на взвешивание пустой платл формы (тара). Таким образом взвешивание тары производится задним фронтом сигнала от датчика 15 положения при отсутствии объекта н а платформе 1,
При спаривании объектов 6 и 7 время прохождения их под датчиком 15 положения составит 2tf (фиг, 2),, IРасширитель 34 импульса обеспечивает формирование импульса длительностью l,5t, . При прохождении под датчиком
15 одного объекта импульс с формирователя 28, сформированный по заднему фронту сигнала от датчика 15,поступает на первый вход элемента И 24 в тот момент, когда на его втором вход будет еще инверсный импульс (выход инвертора 33) расширителя 340 На выходе элемента И 24 сигнал отсутствует. При прохождении под датчиком 15 положения двух спаренных объектов 6 и 7 импульс -с формирователя 28 посту пит на первый вход элемента И 24 после действия расширенного импульса (фиг,2,вых,,33) на первом входе элемента И 24„ Сигнал с выхода элемента И 24 установит через элемент ИЛИ 27 в состояние 1 триггер 19, блокирующий прохождение через элемент И 25 сигнала от датчика 2 положения на взвешивание объекта.Оба объекта 6 и 7 проходят через грузоприемную платформу транзитом. При сходе спаренных объектов с платформы на выходе элемента И 23 формируется импульс (фиг.2,вых023), устанавливающий триггер 19 в состояние О и запускающий контроллер 14 на перепись информации из счетчика 6 в счетчик 7. Во время транзитного прохождения спаренных объектов в зоне датчика 2 положения блок 13 задающих генераторов вырабатывает количество импульсов, равное числу спаренных объектов. В соответствии с этим числом импульсов блок задающих генераторов формирует эталонные серии импульсов f, осуществляющие перепись информации со счетчика (n-l) -ro объекта 6 в счетчик 7 суммарного веса столько раз, сколько было спаренных объектов.
Таким образом, введение второго датчика положения объекта и блока контроля интервалов повышает точность
5
0 о
0
5
0
5
датчик положения объекта, весоизме- . рйтельный блок, задатчик, счетчики веса n-го и (n-l)-ro объектов, счет- чик суммарного веса, блок индикации, блок учета, блок сравнения, мультиплексор, блок учета отклонения веса объекта, блок задающих генераторов и контроллер, вход которого соединен с выходом весоизмерительного блока, а выходы-входы связаны со счетчиками n-го и (n-l)-ro объектов, вход счетчика суммарного веса подключен к выходу контроллера, а его выход - к первым вхЪдам мультиплексора и блока сравнения, второй вход которого соединен с задатчиком, а выход - с блоком учета, выход счетчика веса n-го объекта соединен с вторым входом мультиплексора и схемой учета отклонения веса, выходы которой подключены к блоку учета, выход мультиплексора соединен с блоками индикации и учета, а датчик положения объекта - с первым управляющим входом контроллера, управляющими входами схемы учета отклонения веса мультиплексора и блока задающих генераторов, выходы которого подключены к тактовым входам контроллера, отличающееся тем, что, с целью повышения точности учета суммарного веса объектов, расширения функциональных возможностей, в него введены дополнительный датчик положения объекта и блок контроля интервалов, состоящий из трех триггеров, шести элементов И, двух элементов ИЛИ, трех формирователей импульсов и инверторов, одного расширителя импульса, причем дополнительный датчик положения подключен к первому входу первого элемента И, через первый инвертор - к входу первого формирователя импульса .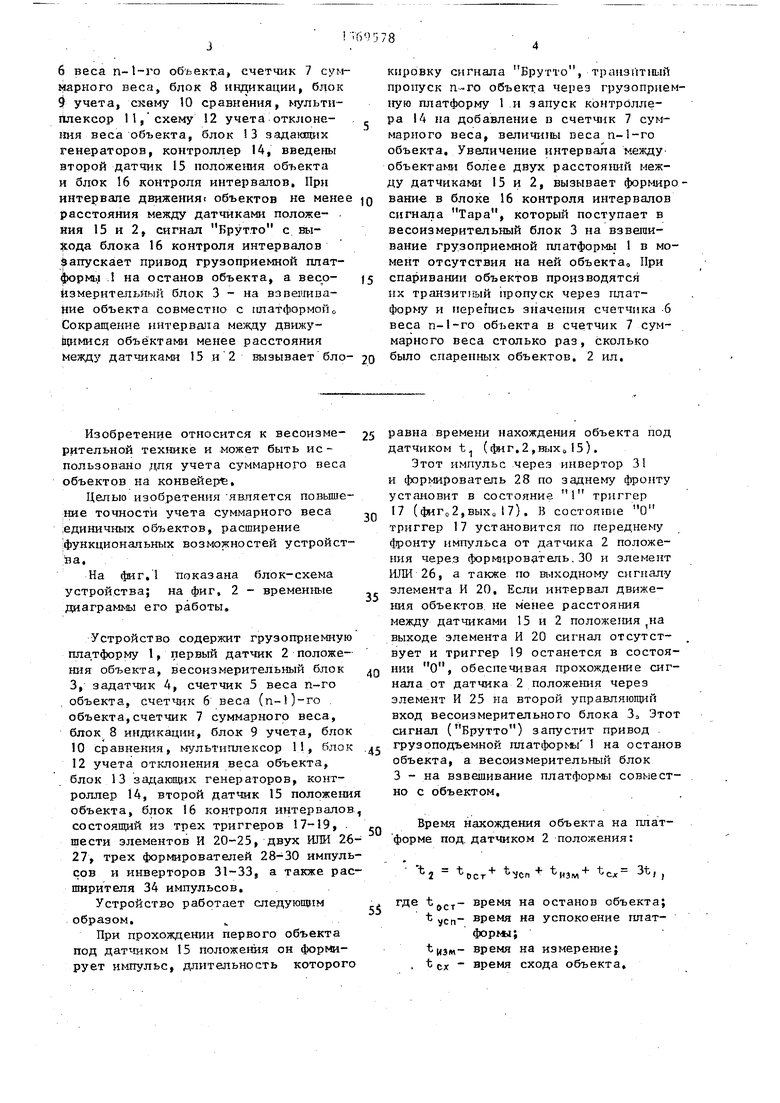
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1986 |
|
SU1377601A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для взвешивания железнодорожного состава в движении | 1984 |
|
SU1223046A1 |
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Устройство для поосного взвешивания подвижных объектов | 1989 |
|
SU1702185A1 |
Изобретение относится к весоизмерительной технике и может быть использовано для учета суммарного веса объектов на конвейере. Цель изобретения - повышение точности учета суммарного веса единичных объектов, расширение функциональных возможностей устройства. Для этого в устройство, содержащее грузоприемную платформу 1, первый датчик 2 положения объекта, весоизмерительный блок 3, задатчик 4, счетчик 5 веса N-го объекта, счетчик 6 веса N-1-го объекта, счетчик 7 суммарного веса, блок 8 индикации, блок 9 учета, схему 10 сравнения, мультиплексор 11, схему 12 учета отклонения веса объекта, блок 13 задающих генераторов, контроллер 14, введены второй датчик 15 положения объекта и блок 16 контроля интервалов. При интервале движения объектов, не менее расстояния между датчиками 15 и 2 положения, сигнал "Брутто" с выхода блока 16 контроля интервалов запускает привод грузоприемной платформы 1 на останов объекта, а весоизмерительный блок 3 - на взвешивание объекта совместно с платформой. Сокращение интервала между движущимися объектами менее расстояния между датчиками 15 и 2 вызывает блокировку сигнала "Брутто", транзитный пропуск N-го объекта через грузоприемную платформу 1 и запуск контроллера 14 на добавление в счетчик 7 суммарного веса величины веса N-1-го объекта. Увеличение интервала между объектами более двух расстояний между датчиками 15 и 2 вызывает формирование в блоке 16 контроля интервалов сигнала "Тара", который поступает в весоизмерительный блок 3 на взвешивание грузоприемной платформы 1 в момент отсутствия на ней объекта. При спаривании объектов производятся их транзитный пропуск через платформу и перепись значения счетчика 6 веса N-1-го объекта в счетчик 7 суммарного веса столько раз, сколько было спаренных объектов. 2 ил.
50
учета суммарного веса за счет адапта- и первому входу второго элемента И, ции устройства к изменению интервала между объектами, останавливаемыми на грузоприемной платформе.
. Это достигается взвешиванием тары (платформы) при увеличении интервала движения объектов и транзитным пропуском через платформу объектов, время взвешивания которых ограничено уменьшением интервала движения, с последующим учетом веса транзитных
объектов.
Формула изобретения
Весоизмерительное устройство, содержащее грузоприемную платформу,
55
а также через второй формирователь - к входу расширителя импульса и перво му входу третьего элемента И, второй вход которого соединен с выходом второго инвертора и первым входом четвертого элемента И, выход первого формирователя подключен к первому входу пятого элемента И и S-входу первого триггера, выход которого сое динен с вторым входом первого элеме та И, выход расширителя импульса под ключен к второму входу второго элеме та И и через третий инвертор - к вто рому входу пятого элемента И, выход
и первому входу второго элемента И,
а также через второй формирователь - к входу расширителя импульса и первому входу третьего элемента И, второй вход которого соединен с выходом второго инвертора и первым входом четвертого элемента И, выход первого- формирователя подключен к первому входу пятого элемента И и S-входу первого триггера, выход которого соединен с вторым входом первого элемента И, выход расширителя импульса подключен к второму входу второго элемента И и через третий инвертор - к второму входу пятого элемента И, выход
первого элемента И подключен к первым входам первого и второго элементов ИЛИ, вторые входы которых соединены соответственно с выходами третьего формирователя и пятого элемента И, а их выходы - соответственно с R-входами первого триггера и S-вхо- дом третьего триггера, выход второго элемента И соединен с первым управ- ягацим входом весоизмерительного блока, выход третьего элемента И подключен к S-входу второго триггера, выход которого соединен с третьим входом второго элемента И, выход четвер- того элемента И соединен с R-входом
ВЫХ15.
Выхг to/7
&//J5U LJ
Вых19.
ВыхЯ.
ВыхЗЬ
0
третьего триггера, вторым управляющим входом контроллера и блоком учета, единичный выход третьего триггера подключен к второму входу четвертого элемента И, а нулевой - к первому и четвертому входам, соответственно шестого и второго элементов И, выход шестого элемента И соединен с вторым управляющим входом весоизмерительного блока и приводом грузопри - емной платформы, при этом второй вход шестого элемента И, R-вход второго триггера, входы второго инвертора и третьего формирователя импульса подключены к датчику положения объекта.
Фиг. 2
| Устройство для учета суммарного веса объектов по мере их поступления | 1981 |
|
SU993041A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
