(54) ГИДРОПРИВОД МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод возвратно-поступательного движения | 1981 |
|
SU1015132A1 |
| Способ испытания гидропривода и устройство для его осуществления | 1986 |
|
SU1495543A1 |
| Гидросистема синхронизации гидродвига-ТЕлЕй | 1979 |
|
SU848781A2 |
| Стенд для испытания погружных гидроприводов | 1987 |
|
SU1511464A1 |
| Стенд для испытания погружных гидроприводов | 1988 |
|
SU1610078A1 |
| Система управления объемным гидроприводом | 1975 |
|
SU736884A3 |
| ГИДРОПРИВОД ЭКСКАВАТОРА | 1990 |
|
RU2041323C1 |
| Гидрообъемный привод ходовой части транспортного средства | 1985 |
|
SU1303446A1 |
| Гидропривод | 1988 |
|
SU1508014A1 |
| Гидропривод режущего устройствалЕСОзАгОТОВиТЕльНОй МАшиНы | 1979 |
|
SU823669A1 |
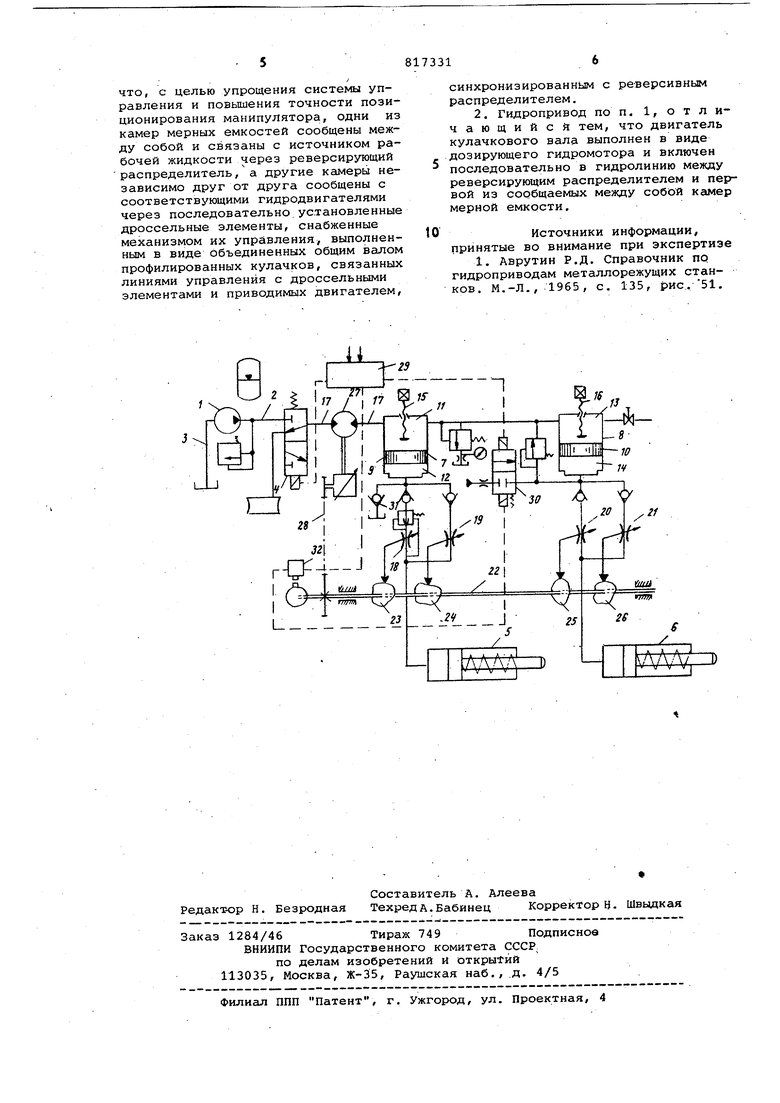
Изобретение относится к гидроприводу и автоматике, а именно объемному гидроприводу периодически действующих манипуляторов и других машинавтоматов с программируемым движением. Известен гидропривод, включающий источник рабочей жидкости с напорными и сливными: магистралями, сообщенный управляемым распределителем с гидродвигателями одностороннего действия и с мерными регулируемыми емкостями, разделенными на две каме ры ограниченно подвижным разделителем - поршнем 1. Недостаток этого гидропривода зак лючается в том, что для обеспечения Зсшанного движения требуется система многоканального частотно-импульс ного управления реверсирующими золо никами, что конструктивно сложно и дорого. Кроме того, наличие гЮгрешностей дозирования, связанных а частным пе реключением мерных емкостей, снижае точчосхв поз 1ционирования манипулят ра в заданном положении. Большая частота переключения снижает также надежность работы привода. Цель изобретения - упрощение системы управления и повышение точности позиционирования манипулятора. Указанная цель достигается тем, что одни из камер мерных емкостей сообщены между собой и связаны с источником рабочей жидкости через реверсирующий распределитель, а другие камеры независимо друг от друга сообщены с соответствующими гидродвигателями через последовательно установленные дроссельные элементы, снабженные механизмом управления, выполненным в виде объединенных общим валом профилированных кулачков, которые связаны линиями управ.пения с дрос сельными элементами и приводимые двигателем, синхронизированным с реверсирующим распределителем. Двигатель кулачкового вала выполнен в виде дозирующего гйдромотора и включен последовательно в гидролинию между реверсирующим распределителем и первой из сообщенных между собой камер мерной емкости. На чертеже изображена схема предлагаемого гидропривода, Гидропривод содержит источник рабочей жидкости 1 с напорной 2 и сливной 3 магистралями, управляемый
реверсирующий распределитель 4, гидродвигатели 5 и 6 одностороннего действия, мерные емкости 7 и 8, и кажда из которых разделена соответственно подвижными разделителями-поршнями 9 и 10 на две камеры 11, 12 и 13, 14 соответственно для каждой емкости.
Поршни 9 и 10 ограниченно подвижны между нижними и верхними регулируемьми упорами 15 и 16, которые являются задатчиками объема каждой мер ной емкости 7 и 8,
Верхние камеры 11 и 13 мерных емкостей сообщены между собой и связаны с источником рабочей жидкости 1 при помощи гидролинии 17 через общий реверсирующий распределитель 4, Нижние камеры 12 и 14 мерных емкостей 7 и 8 сообщены с гидродвигателямй 5 и б одностороннего действия через дроссельные элементы 18-21 с регулируемым проходным сечением, снабженные механизмом управления. Механизм управления выполнен в виде объединенных общим валом 22 профилированных кулачков 23-26, связанных линиями управления с сЬответствующими дроссельными элементами 18-21.
Общий вал 22 приводится от двигателя 27, в качестве которого используется дозирующий гидромотор. Двигатель 27 синхронизирован с реверсирующим распределителем 4 и установлен между ним и ближайшей к нему камерой 11, т.е. включен последовательно в гидролинию 17.
Двигатель 27 связан с кулачковым общим валом 22 через регулируемую по передаточному отношению передачу 28, обеспечивающую полный поворот вала 22 при совершении рабочего ход манипулятора, т.е. при переходе из исходного состояния в заданное.
БЛОК управления 29 переключает р,еверсирующий 4 и дополнительный 30 распределители, последний связан с гидролинией под давлением, сообщенной с подпиточными клапанами 31. Вал 22 воздействует на контакты конечног реле 32, связанного, с блоком управления 29,
Гидропривод работает следующим образом.
Установкой положения задатчиков (верхних регулируемых упоров 15 и 16) устанавливают конечное заданное состояние (положение рабочего органа) манипулятора. Профилированием кулачков 23-26 (установкой кулачков подходящего профиля) задают закон движения манипулятора из исходного состояния в заданное и обратно. Настраивгиот передачу 28 так, чтобы вал 22 повернулся на требуемый угол (обычно , что наиболее рационгшьно) при переходе манипулятора в заданное положение, которое он примет
когда поршни 9 и 10 остановятся своими нижними упорами.
Пуск привода осуществляется от блока управления 29, переключающего распределитель 4 в нижнюю позицию. При этом поршни 9 и 10 перемещаются вниз, а штоки гидродвигателей 5 и. 6 двигаются вправо со скоростью, заданной открытием дроссельных элементов 18 и 20. По мере перемещения штоков вращение вала 22 гидромотора, пропорциональное объему протекшей через него жидкости, изменяет скорость движения штоков, чем задает необходимую траекторию движения манипулятора при его переходе из исходного состояния в заданное.
При реверсировании манипулятора распределитель 4 переключается в исходное положение (показано на схеме) и штоки гидродвигателей 5 и 6 перемещаются влево со скоростью, заданной -дроссельными элементами 19 и 21. Закон изменения открытия этих дросселей определяется кулачками 24 и 26 и происходит по величине объема жидкости , проходящей в двигатель 27 в обратном направлении.
При отсутствии утечек объемы жидкости, протекающей через двигатель 2 в прямом и обратном направлении, одинаковы, поэтому вал 22 возвращается в исходное состояние.
При этом привод готов к повторени нового рабочего цикла манипулятора. .При наличии утечек для доворота вала 22 включается дополнительный распределитель 30, который выключается по сигналу реле 32. Причем перед началом нового рабочего хода манипулятора вал 22 и поршни 9 и 10 выставляются в своем исходном положении (для поршней это положение соответствует их контакту с задатчиком верхним упором 15 или 16) по команде блока 29, переключающего дополнительный распределитель 30, связанный с гидролинией под давлением, недостаточным для смещения штоков гидродвигателей 5 и 6 из их исходных крайних левых положений.
Таким образом, предлагаемый гидропривод манипулятора не требует слоной системы управления и обеспечивает высокую точность позиционирования.
Формула изобретения
что, с целью упрощения системы управления и повьтшения точности позиционирования манипулятора, одни из камер мерных емкостей сообщены между собой и связаны с источником рабочей жидкости через реверсирующий распределительна другие камеры независимо друг от друга сообщены с соответствующими гидродвигателями через последовательно.установленные дроссельные элементы, снабженные механизмом их управления, выполненным в виде объединенных общим валом профилированных кулачков, связанных линиями управления с дроссельными элементами и приводимых двигателем. 2 I /Г7Т/7 If Д-, 1 , / I к . „j
синхронизированным с реверсивным распределителем.
0
Источники информации, принятые во внимание при экспертизе
1, Аврутин Р.Д. Справочник по гидроприводам металлорежущих станков. М.-Л.,1965, с. 135, рис. 51. //
