Изобретение относится к электроприволУ и может, найти применение для определения электромагнитнЪго момен.та в системах управления и контроля электропривода с асинхронным электро дви1;ателем с фазным ротором. Известно устройство для определения электромагнитного момента электрической машины, содержащее датчик ЭДС в виде измерительной обмотки в зоне статорной обмотки, два гальванометра мощности, петли которых подключены к датчику ЭДС, одна непосред ственно, а вторая через интегрирующий контур, а обмотки электромагни-. тов гальванометров соединены йоследо вательно со статорной обмоткой двига теля. Одна непосредственно, а другая через дифференцирующую цепочку, причем параллельно обмотке электромагни та гальванометра с петлей, подключен ной к интегрирующему контуру и диАференцирукчцему контуру включен резис тор 1 . Недостатком этого известного .устройства является низкая точность измерения и сложность конструкции. Наиболее близким по технической сущности и по достигаемому результату к предлагаемому изобретению являемся устройство для определения момента асинхронного электродвигателя,.содержащее три датчика фазных напряжений, три датчика фазных токов статорной обмотки, подключенный, к датчикам фазных напряжений блок определения составляющих напряжений по двум прямоугольньв координатам, подключенный к трем датчикам фазных токов статорной обмотки блок определения составлякяцих токов по двум прямоугольнь координатам, подключенные к выходам указанных блоков два элемента определения составляющих производной по времени потокосцепления по двум прямоугольным координатам, включенные на выходах этих элементов два блока интегрирования, два блока перемножения, первые входы которых соединены с выходами двух блоков интегрирования, а вторые их вхолол соединены с выходами блока определения соответствукчцих токов статорной обмотки по двум прямоугольным координатам, подключенным к выходам двух блоков перемножения элемент суммирования 2 . Недостатком этого известного устройства является недостаточная точность определения момента, причем ошибка может быть, особенно существенной при длительной , например в системе управления, вслелствие ухода нуля блоков интегрирования.
Цель изобретения - повыигение точности определения момента.
Укэзонная- цель достигается тем, что устройство содержа1пее по крайней мере Один датчик электрических параметров статорной обмотки и блок перемножения, снабжено блоком определения корня квадратного из алгебраической суммы квадратов входных сигналов Один из входов которого соединен с выходом датчика тока статорной обмотки, а выход связан р одним из входов блока перемножения. Кроме того, в устройство введен датчик тока роторной обмотки, выход которого соединен с вторым входом блока определения корня квадратного из алгебраической суммы квадратов входных сигналов и вторым входом блока перемножения, а так же выход блока определения корня квадратного из алгебраической . квадратов входНЕлх сигналов связан с блоком перемножения через введенный в устройство элемент алгебраического суммирования, к другому входу которого подключен выход датчика тока статорной обмотки, причем к другог у входу- блока перемножения выход датчика тока статорной оомотки подключен непосредственно, а к другому входу блока определения корня квадратного из алгебраической суммы квадратов входных сигналов подключен датчик напряжения статорной обмотки.
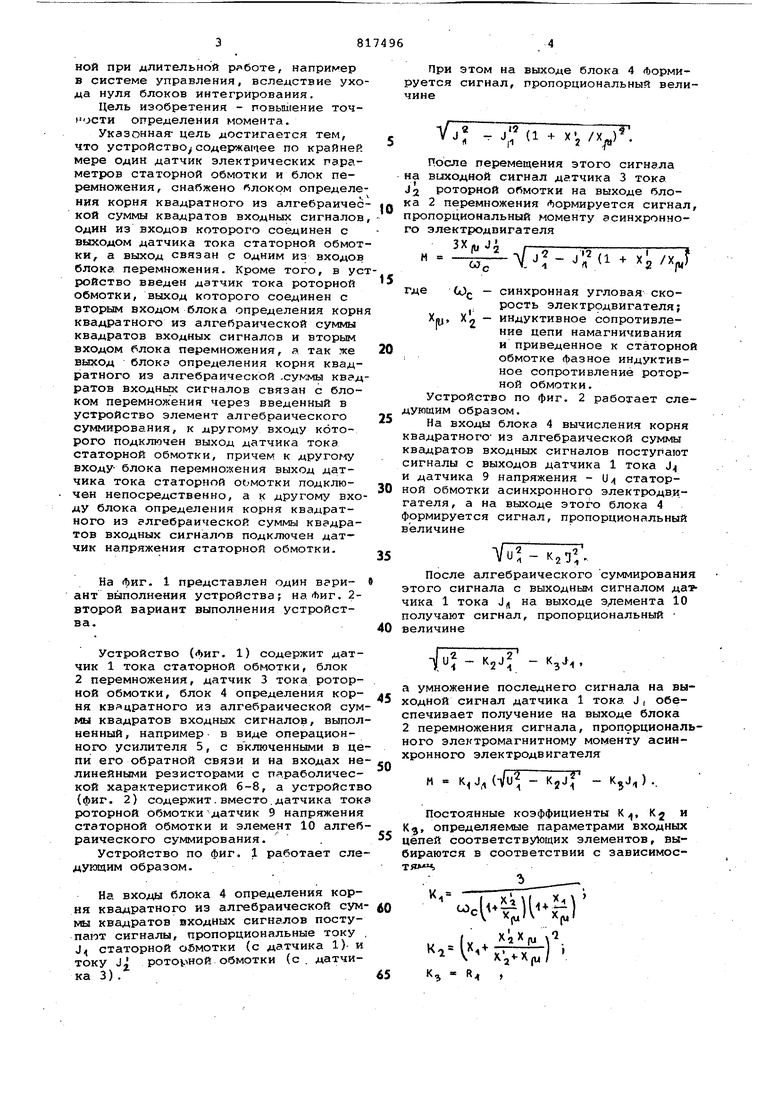
На фиг, 1 представлен один вгри- 9 ант выполнения устройства; . 2второй вариант выполнения устройства.40 Устройство (фиг, 1) содержит датчик 1 тока статорной обмотки, блок 2 перемножения, датчик 3 тока ротор- . ной обмотки, блок 4 определения корня квадратного из алгебраической суммы квадратов входных сигналов, выполненный, например- в виде операционного усилителя 5, с включенными в цепи его обратной связи и на входах не- ,« линейными резисторами с параболической характеристикой 6-8, а устройство {фиг. 2) содержит.вместо.датчика тока роторной обмотки датчик 9 напряжения статорной обмотки и элемент 10 алгебраического суммирования. . Устройство по фиг, 1 работает следукядим образом. На входы блока 4 определения корня квадратного из алгебраической сум- 0 №J квадратов входных сигналов поступают сигналы, пропорциональные току J статорной обмотки (с датчика 1)- и J Х. с А я Vi v,4.j- -I .- -х - ,-. току Jj poтov нoй обмотки (с. датчика 3).
При этом на выходе блока 4 Формируется сигнал, пропорциональный величине
V
-
у /X V X J /
После перемещения этого сигнала на виходной сигнал датчика 3 тока J2 роторной обмотки на выходе блока 2 перемножения ()Ормируется сигнал, пропорциональный моменту асинхронного электродвигателя
3X(uJ
xlj
J7 (1
М
о57
где (л) - синхронная угловая скорость электррдвигателя; Хя1, Хя - индуктивное сопротивление цепи намагничивания и приведенное к статорно :обмотке фазное индуктивное сопротивление роторной обмотки.
Устройство по фиг, 2 работает следующим образом.
На входы блока 4 вычисления корня квадратного из алгебраической суммы квадратов входных сигналов поступают сигналы с выходов датчика 1 тока J и датчика 9 напряжения - U статорной обмотки асинхронного электродвигателя, а на выходе этого блока 4 формируется сигнал, пропорциональный величине
Vub к,и
После алгебраического суммирования этого сигнала с выходным сигналом датчика 1 тока J на выходе эдхемента 10 получают сигнал, пропорциональный величине а хо сп 2 но хр К це би 2 умножение последнего сигнала на выдной сигнал датчика 1 тока J, обеечивает получение на выходе блока перемножения сигнала, пропорциональго электромагнитному моменту асинонного электродвигателя к, J, (V, - - K,jJ, ) .. Постоянные коэффициенты К, Kj и , определяемые параметрами входных пей соответствующих элементов, выраются в соответствии с зависимос 14,)1-1-;) .