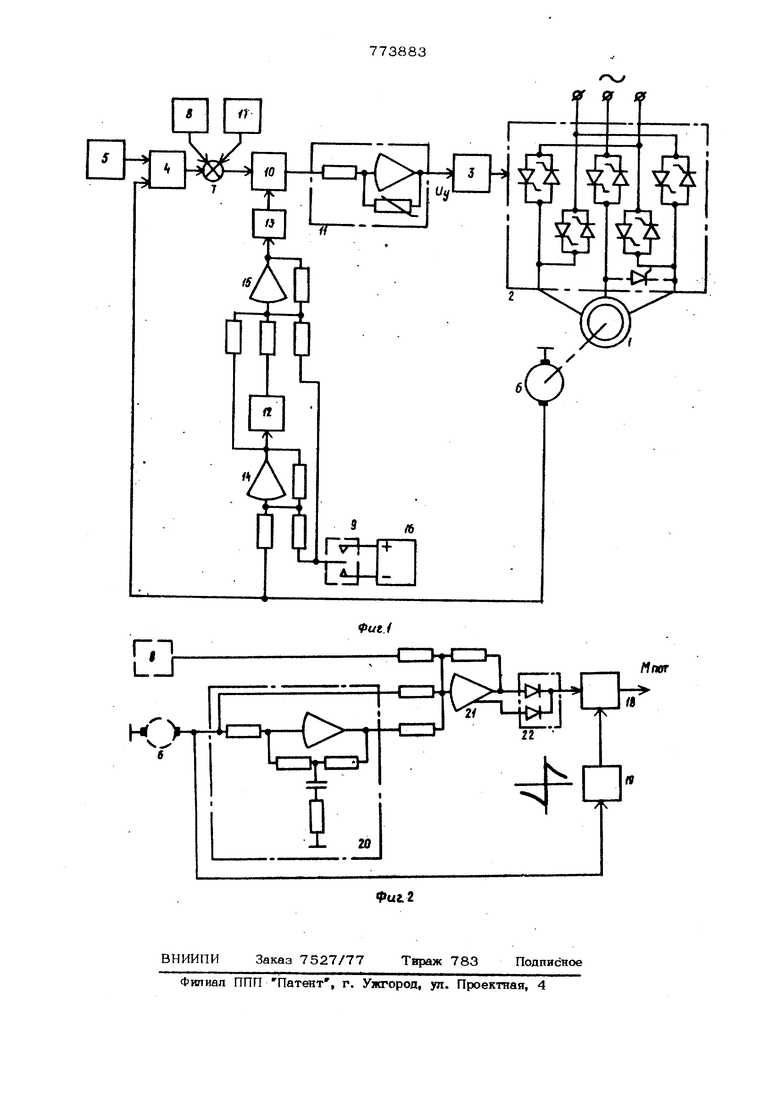
Изобретение относится к электротехнике, а именно к управлению электроприводами с асинхронными двигателями и может применяться в электроприводах лифтов и подъемников. Известно устройство цля управления асинхронным электроприводом лифта, содержащее подключенный к статорной обмотке асинхронного электродвигателя тиристорный регулятор напряжения с систе мой импульсно-фазового управления тиристорами, контактный переключатель напряжения движения, два компаратора для режимов ускорения и торможення, подключенные к их входам датчик скорости электропривода и задающий генера тор, состоящий из узла ускорения, на выходе которого вырабатывается нapacтa ющий в функции времени управляющийсигнал, и узла замедления, образованного путевыми датчиками и формирующего закон изменения скорости в режиме торможения, блок переключения режимов Т Ь{едостатком этого устройства является недостаточная точность воспроизведения задаваемой диаграммы движения и определяемая этим пониженная производительность и комфортабельность лифта, что является следствием существенной нелинейности характеристики двигателя и влиянием изменяющегося момента нагрузки в зависимости от загрузки кабины. Наиболее близким к предложенному по технической сущности и достигаемому эффекту является устройство для управления асинхронным электроприводом лифта, содержащее подключенный к статорной обмотке асинхронного электродвигателя тиристорный регулятор напряжения с системой импульсно- зового управления тиристорами, регулятор скорости с подключенными к его входам задатчиком интенсивности и датчиком скорости электропривода, включенный на выходе регулятора скорости элемент суммирования, датчик загрузки кабины, блок переключения режимов, соединенные последовательно блок интегрирования и блок формирования требуемого закона изменения скорости в функции пути в режиме торможения, включенные через выходной элемент блока переключения режимов между выходом датчика скорости и входом элемента суммирования, включенные через выходн ые элементы блока переключения режимов между выходом задатчика интенсивности и входо суммирующего элемента блоки формирования управляющих сигналов в режимах разгона и торможения, включенный между выходом датчика загрузки кабины и входом элемента суммирования релейный функциональный преобразователь 21. Недостатком этого устройства является ограниченная производительность и комфортабельность лифта, вследствие недостаточной точности воспроизведения задаваемой диаграммы движения, определяемой изменением ошибки регулирования вследствие изменения передаточного коэффициента системы управления электродвигателем в процессе разгона и торможения и влиянием переменного момента потерь в механической передаче лифта. Цель изобретения - повышение производительности и комфортабельнгюти лифта Это достигается тем, что в устройство для управления электроприводом лифта, содержащее подключенный к статор- ной обмотке асинхронного электродвигателя гиристорный регулятор напряжения с системой импульсно-фазового управления тиристорами, регулятор скорости с подключенными к его входам задатчиком интенсивности и датчиком скорости элект ропривода, включенный на выходе регуля тора скорости элемент суммирования, датчик загрузки кабины, блок переключения режимов, введены блок перемножения, нелинейный блок определения корня квадратного, нелинейный блок определения обратной величины, блок определения модуля, два суммирующих усилителя, источник постоянного напряжения, узел определения момента потерь в механичес кой передаче, причем выход нелинейного блока определения корня квааратного.под ключен ко входу системы нмпульсно- - зового управления тиристорами, а его вход соединен с выходом блока перемножения, два входа которого подключены к выходам элемента суммирования и бло ка определения модуля, выход источника постоянного напряжения через выходной элемент блока переключения режимов 7 83.4 подключен ко входам первого и второго суммирующих усилителей, выход датчика скорости подключен ко входу nepBoio суммирующего усилителя, а выход последнего подключен непосредственно и через нелинейный блок определения обратной величины ко входам второго суммирующего усилителя, выход которого соединен со входом блока определения моду- ля, выход узла определения момента потерь в механической передаче подключен ко входу элемента суммирования, а узел определения момента потерь в механической передаче выполнен в виде включенного на выходе этого узла дополнительного блока перемножения, подключенного к первому входу этого блока перемножения функционального преобразователя, соединенного с выходом датчика скорости электропривода, включенной между выходом датчика скорости электропривода и вторым входом блока перемножения цепочки из соединенных последовательно блока определения динамического момента суммирующего усилителя и элемента выделения модуля, причем ко входу дополнительного суммирующего усилителя этой цепочки подключен выход датчика загрузки кабины. На фиг. 1 приведена схема предложенного устройства управления; на фиг. 2 - схема узла определения момента потерь в механической передач. Устройство для управления асинхронным аректроприводом лифта содержит подключенные к статорной обмотке асинхронного электродвигателя 1 тиристорный регулятор 2 напряжения с системой 3 импульсно-фазового управления тиристорами, регулятор 4 скорости с подключенными к его входам задатчиком интенсивности 5 н датчиком 6 скорости электропривода, включенный на выходе регулятора 4 скорости элемент суммирования 7, датчик 8 загрузки кабины, блок 9 переключения режимов, блок 1О перемножения, нелинейный блок 11 определения корня квадратного, нелинейный блок 12 определения обратной величины, блок 13 определения модуля, два суммирующих усилителя 14 и 15, источник постоянного напряжения 16, узел 1,7 определения момента потерь в механической передаче, причем нелинейного блока 11 определения корня квадратного подключен ко входу системы 3 1мпульсно-фазового управления тиристорами, а его вход соединен с выходом блока перемножения 10, два входа которого подключены к выходам элемента суммирования 7 и блока определения модуля 13, выход источника постоянного напряжения 16 через выходной элемент блока переключения режимов 9 подключен ко входам первого 14 и второ го 15 суммирующих усилителей, выход датчика 6 скорости подключен ко входу первого суммирующего усилителя 14, а выход последнего подключен непосредственно и через нелинейный блок 12 определения обратной величины ко входам второго суммирующего усилителя 15, выход которого соединен со входом блока 13. определения модуля, выход узла 17 -определения момента потерь в механической передаче подключен ко входу элемента суммирования 7. Узел 17 определения момента потерь в механической передаче (фиг. 2) выпал ней в виде включенного на выходе этого узла дополнительного блока18 перемножения, подключенного к первому входу этого блока перемножения функционального преобразователя 19, соединенного с выходом датчика 6 скорости электропривода, включенной между выходом датчика 6 скорости электропривода и вторым входом блока 18 перемножения цепочки из соединенных последовательно блока определения динамического ;момент 20, суммирующего усилителя 21 и элемента выделения модуля 22, причем ко входу дстолнительного суммирующего уси лителя 21 этой цепочки подключен выход датчика 8 загрузки кабины. Работает устройство следующим образом. Выходное напряжение источника постоянного напряжения 16 пропорционально синхронной скорости С0„ асинхронного электродвигателя 1. При разгоне электродвигателя тиристоры регулятора 2 напряжения отпираются, причем только те, которы обеспечивают нужное чередование фаз и разгон в нужном направлении. Одновременно выходной элемент блока 9 переключения режимов подключают ко входу первого суммирующего усилителя 14, выходное напряжение источника 16 постоянного напряжения нужной полярности, соответствующее синхронной скорости 6Э{ч. Сигнал на выходе первого суммирующего усилителя 14 при этом пропорционален раз- нос11и синхронной GOo и фактической 60 скоростей, т. е. величине сОд-СО.Этот сиг нал поступает на вход второго суммирующего усилителя 15 непосредственно и че- рез нелинейный блок 12 определения обратной величины f/COp- СО . На вход второго суммирующего усилителя 15 с вывода источника постоянного напряжения 16 поступает также сигнал, пропорциональный синхронной скорости СО(,. Модуль выходного напряжения второго суммирующего усилителя 15 умножается на выходное напряжение элемента суммирования 7, пропорциональное сумме выходного сигнала и р(; регулятора скорости 4, выходного сигнала датчика загрузки кабины В, пропорционального активному моменту нагрузки КддМр, определяемому весом перемещаемых грузов (кабина с грузом и противовес), и выходного сигнала блока определения момента потерь в механической передаче 17 (), т . е. на величину т ирс КмЛЛг мК - масштабный коэффициент момента. Из полученного в результате такого перемножения сигнала с помощью блока11 обеспечивается извлечение корня квадратного с сохранением знака входного сигнала (блок 11 определения корня квадратного может быть выполнен, например, в виде операционного усилителя с включением в- цепи его обратной связи нелинейным резистором с квадратичной характеристикой, например, тиристовым резистором. В результате на вход снетемы 3 импульсно-фазового управления тиристорами подается сигнал управления, определяемый зависимостью ( )Х(и1 V Х(у) J «-(-%У «м-:да- с1 (ирс+КмМг+Км пот - индуктивные сопротивления обмоток статора,. ротора и контура намагничивания;Т,,.- активные фазные сопротивления обмоток статора и ротора; X + Xj- индуктивное фазное сопротивление короткого ..замыкания; °° перецаточный коэффи np liy циент тиристорного регулятора напряжения с системой импуль сно-фааного управления тиристорами, определяющий зависимость фазного напряжения Uif асЛ1нхронного электродвигателя от управляющего напряжения OnПриведенная зависимость представляет собой функцию, обратную функции, свя зывающей фазное напряжение асинхронно го электродвигателя с величиной его мо мента, благодаря чему момент М асинхронного электродвигателя пропорционален выходному напряжению элемента сум мирования 7, . i7-(u ,причем вь1ходной сигнал датчика 8 загрузки кабины и выходной сигнал узла 17 определения момента потерь в механической передаче осущест вляют регулирование по статическому моменту нагрузки и обеспечивают инвариантность системы регулирования скорости электропривода по отношению к этому моменту нагрузки. Тогда при использовании, например, пропорциЪнального; регулят ора 4 скорост с коэффициентом усиления Крс зависимос скорости 00 асинхронного электродвигате ля 1 от ее заданного значенияС0з и5ц/ определяемого отношением выходного на ряжения Озы задатчика интенсивности 5 к передаточному коэффициенту К у датчика 6 скорости, характеризуется дифференциальным уравнением , - постоянная време Выбором величины 1 „g коэффициента усиления регулятора 4 скорости можно обеспечить достаточно малое значение постоянной времени Т , ири которой об печивается высокая точность отработки задаваемой диаграммы движения электр привода, причем независимо от загрузки кабины и переменного момента потерь в механической передаче, а нелинейный характер механической характеристики асинхронного электродвигателя также не оказывает при этом отрицательного влияния на точность отработки задаваемой диаграммы движения. Это позволяет осуществлять разгон с максимальным допустимым ускорением и тем самым повысить производительность лифта при обеспечении максимальной комфортабельности для пассажиров. Аналогична решается эта задача в режиме торможения, когда переключением тиристоров регулятора 2 напряжения обеспечивается обратное чередование фаз подаваемого на электродвигатель трехфазного напряжения и с помощью выходного элемента блока 9 переключения режимов изменяется полярность подаваемого на входы первого 14 и второго 15 суммирующих усилителей постоянного напряжения в соответствии с изменением знака синхронной скорости, т. е. осуществляется торможение в режиме противовключения. Это же устройство может быть использовано для обеспечения режима динамического торможения, при котором переключением тиристоров регулятора 2 напряжения обеспечивается протекание постоянного тока через статорную обмотку электродвигателя 1,а блок 9 переключения режимов отключает входы первого 14 и второго 15 суммирующих усилителей от источника 16 постоянного напряжения и изменяет величины входных сопротивлений второго суммирующего усилителя 15 в соответствии с требуемой при этом зависимостью управляющего напряжения Uy от выходного напряжения элемента суммирования 7 U UPC+XM P- M У L3KM-K R2Q г(1,Щ 60 2 i V J , ); - передаточный коэффициент тиристорного регулятора 2 напряжения с системой 3 импульсно-фазового управления тиристорами в режиме динамического торможения. При этом указанная зависимость обеспечивается с помощью тех же элементов, которые используются в режиме разгона. Узел опрецеления момента потерь в механической передаче (фиг. 2) работае следующим образом. Сигнал с выкоца датчика 6 скорости электропривода поступает на вход блока 20 определения динамического момента. В данном случае этот блок выполнен в виде соединенных параллельно пропорционально-дифференциального операционног усилителя, выходной сигнал которого пр порционален величине J7со 4- ТГ) Ц пи, по которой передается сигнал -Jco . Суммарный выходной сигнал блока 20 поступает на вход дополнительного суммирующего усилителя 21 и пропорционален величине динамического момента -.. V .. Зш На вход дополнительного суммирующего усилителя 21 поступает также выходной сигнал с датчика 8 загрузки кабины, пропорциональный активному моменту нагрузки М J, , определяемому весом кабины с грузом и противовеса. Пос ле суммирования этих сигналов на выходе блока 22 выделения модуля формируе ся сигнал, пропорциональный модулю передаваемого через редуктор механическо передачи момента (Мду,Ц- Mpj . Функцио нальныйпреобразователь 19 формирует на своем выходе сигнал, пропорциональный зависящему от величины скорости электропривода коэффициенту потерь в механической передаче Kf,Q-p с учетом знака этой скорости . После перемножения выходных сигналов блока 22 выделения модуля и функционального преобразователя 19 на выходе блока .перемножения 18 и узла 17 формируется сигнал, пропорциональный величине момента потерь в механической передаче. . noTS ЕГсли величина максимального момента двигателя существенно превышает величину момента потерь в механической передаче, требования к точности определения момента потерь становятся менее жесткими, тогда узел 17 определения момента потерь в механической передаче может быть упрощен за счет исключения из него блока 20 определения динамического момента, а ко входу дополнительного суммирующего усилителя 21 может быть подФормула изобретения
Устройство для управления асинхронным электроприводом лифта, содержащее подключенный к статорной обмотке асин- хронного электродвигателя тиристорный регулятор напряжения с системой импульсно-фазового управления тиристорами, pe-i гулятор скорости с подключенным к еГЪ входам задатчиком интенсивности и датчиком скорости электропривода, включенключей выход регулятора 4 скорости, выходной сигнал которого можно считать пропорциональным динамическому моменту-. d 60 Дин Г J образом,. предлон ение обеспечивает повышение произвоаительности и комфортабельности лифта путем повышения точности отработки задаваемой диаграммы, поскольку в предложенном устройстве исключается отрицательное влияние нелинейности механической характеристики асинхронного электродвигателя на эту точность, а также исключается влияние момента потерь в механической передаче на точность отработки diiaграммы-движения, т. е. обеспечивается инвариантность системы регулирования по отношению к моменту нагрузки и к Moi tCHTy потерь, обеспечивается вoз ;oжнocть снижения инерционности электропривода до постоян- ной малой величины независимо от абсолютного значения скорости в любом ре ней- ме разгона и торможения. Изобретение может также использо- ваться для управления асинхронным электроприводом с двухскоросгным электродвигателем или с двигателями большой скорости (с малым числом пар полюсов (и малой скорости), с большим числом пар полюсов), когда используются два комплекта тиристорных регуляторов напряжения для питания соответственно обмоток большой и малой скорости, тогда при разгоне электропривода устройство управления подключается ко входу комплектатиристорного регзлятора на-пряжения, питающего обмотку большой скорости, а при торможении это устройство подключается ксэ входу второго комплекта тиристорного регзлятора напряжения, питающего обмотку малой скорости (с помощью блока переключения режимов) . 1177 ный на выхоце регулятора скорости элемент суммирования, датчик загрузки кабины, блок переключения режимов, отличающееся тем, что, с целью повышения производительности и комфор - табельности в него введены блок перемнО жения, нелинейный блок определения корня квадратного, нелинейный блок определе ния обратной величины, блок определения модуля, два суммирующих усилителя, источник постоянного напряжения, узел определения момента потерь в механической передаче, причем выход нелинейного блока определения корня квадратного подч ключен ко входу системы импульсно-фа- зового управления тиристорами, а его вход соединен с выходом блока перемножения, цва входа которого подключены к выходам элемента суммирования и блока определения модуля, выход источника по- стоянного напряжения через выходной эле мент блока переключения режимов подклю чен ко входам первого и второго суммирующих усилителей, выход датчика скорости подключен ко входу первого суммйрующего усилителя, а выход последнего подключен непосредственно и через нелинейный блок определения обратной величины входам второго суммирующего усилителя, выход которого соединен со дом блока определения модуля, выход узл 3 определения момента потерь в механической передаче подключен ко входу элемента суммирования. 2. Устройство по п. 1, отлича ющ е е с я тем, что, узел определения момента потерь в механической передаче выполнен в виде включенного на выходе этого узла дополнительного блока перемножения, подключенного к первому входу этого блока перемножения функционального преобразователя, соединенного с выходом датчика скорости электропривода, включенной между выходом датчика скорости электропривода и вторым входом блока перемножения цепочки из .соединенift ix последовательно блока определения динамического момента суммирующего усилителя и элемента выделения модуля, причем ко входу дополнительного суммирующего усилителя .подключен выход датчика загрузки кабины. Источники информации, принятые во внимание при экспертизе 1. Патент США N 387918, кл. 318-203, 1975. 2.Автоматизированный электропривод Б промышленности . Труды У1 Всесоюзной конференпни по автоматизированному;/ электроприводу. М., Энергия, 1974, с. 263-266, рис. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Электропривод | 1978 |
|
SU748763A1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1979 |
|
SU860254A2 |
| Устройство для управления асинхроннымдВигАТЕлЕМ C фАзНыМ POTOPOM | 1979 |
|
SU851713A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод переменного тока с экстремальным управлением | 1987 |
|
SU1495968A1 |
| Способ управления асинхронным электродвигателем лифта и устройство для его осуществления | 1988 |
|
SU1690159A1 |
Мпвг
