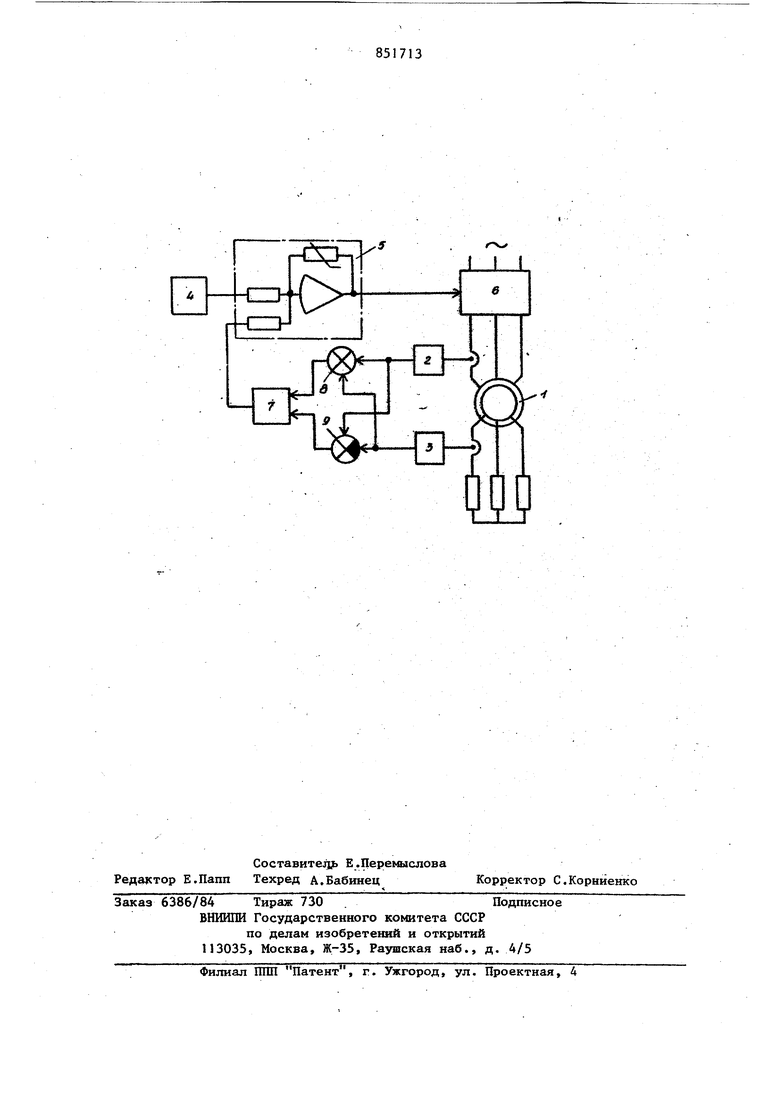
Изобретение относится к электротехнике, а именно к области управлени электроприводами с асинхронными двигателями , и может применяться в элект роприводах подъемно-транспортных машин. Известно устройство для управления асинхронным двигателем с фазным ротором, содержащее подключенный к статору двигателя тиристорный регулятор напряжения, подключенный к его входу регулятор скорости, логический блок и включенный на его входе датчик тока статора р. Недостатком этого устройства являе ся нестабильность и низкая динамическая точность управления двигателем, определяемые нестационарностью характеристик двигателя во время переход- . ных процессов. Наиболее близким к предлагаемому по технической сущности и по достигаемому результату является устройство для управления асинхронным двигателем С фазным ротором, содержащее соеданенные последовательно блок задания двигателя, представленный в виде регулятора скольжения, блок извлечения корня квадратного из суммы входных сигналов и подключенный к статору двигателя тиристорный регулятор напряжения, включенные между выходом блока задания момента двигателя и входом блока извлечения корня квадратного из суммы входных сигналов, блок деления и блок перемножения и подключенный ко входам последних блок определе1гая отношения скольжения к величине сопротивления, содержащий датчики тока статора и ротора, выход первого из которых подключен ко входу умножения, а выход второго - ко входу делителя множнтельно-делительного устройства, выход которого через нелинейный резистор с параболической характеристи- . кой соединен со входом операционного усилителя, в цепь обратной связи которого включен второй нелинейный ре- 38 зистор с параболической характеристикой, при этом вход усилителя подключен через линейный, резистор к источнику постоянного напряжения, реверсивный выход усилителя соединен со вторым входом умножения множительно-делительного устройства {2, Это устройство уменьшает методическую погрешность управления, повьппает стабильность и устойчивость системы управления, однако недостатком его является сложность и ограниченная инструментальная точность управления, определяемые прежде всего большим количеством нелинейных элементов и связанных с этим большим количеством последовательно выполняемых нелинейных преобразований сигналов, что увеличи- вает инструментальную погрешность, повьш1ает требования к точности выполнения этих нелинейных элементов, а это, в свою очередь, усложняет.и эти элементы и устройство в целом. Цель изобретения - упрощение устрой ства и повышение точности управления. Поставленная цель достигается тем, что устройство для управления асинхрон ным двигателем с фазным ротором, содержащее датчик тока статора и датчик тока ротора двигателя, блок перемножения, соединенш 1е последовательно блок задания момента двигателя, блок извлечения корня квадратного из суммы входных сигналов и подключенный к статору двигателя тиристорньй регулятор напряжения, снабжено блоком сложения и блоком вычитания, двй входа каждого из которых подключены к выходам датчиков тока статора и ротора, а их выходы соединены со входами блока йеремножени) выход которого подключая ко входу блока извлечения корня квадратного из cyMJ«j входных сигналов. На чертеже прйведе1ф схема устройства. Устройство для управления асинхрон ным двигателем 1 с фазным ротором со.держит датчик 2 тока статора и датчик 3 тока ротора, соединенные последовательно блок А задания момента двигате ля, блок 5 извлечения корня квадратного из суммы входных сигналов и подклю енный к статору двигателя 1 тиристорный регулятор 6 напряжения, блок 7 перемножения, блок 8 сложения и блок 9 вычитания. Два входа блока 8 сложения и два входа блока 9 вычитания подкшочены к выходам датчика 2 тока статора и датчика 3 34 тока ротора. Выходы блока 8 сложения и блока 9 вычитания подключены ко входам блока 7 перемножения, выход которого соединен со входом блока 5 извлечения корня квадратного из суммы входных сигналов. В качестве блока 4 задания момента двигателя может использоваться, например, регулятор скорости (скольжения) или источник напряжения. Блок 5 извлечения корня квадратного 13 суммы входных сигналов может быть выполнен, например, в виде суммирующего операционного усилителя с включенньм в цепи его обратной связи нелинейным резистором с параболической характеристикой. Блок 8 сложения и блок 9 вычитания могут быть выполнены, например, в виде операционных усилителей. Устройство работает следующим образом. Выходные сигналы датчика 2 тока статора Ц и датчика 3 тока ротора 1 поступают на входы блока 8 сложения и блока 9 вычитания, в результате чего на выходах последних формируются сигналы, пропорциональные соответственно величинам з + к.а 3, 4#2)Vr. Z. к)1. ( индуктивные фазные сопротивления статора, ротора и цепи намагничивания;л- активное фазное сопротивление статора. Умножение входных сигналов на требye ялe постоянные коэффициенты обеспечивается выбором параметров входных цепей блоков 8 и 9 (например, если в качестве этих элементов использовать операционные усилители, то выбираются параметры их входных резисторов) Указанные сигналы поступают на входы блока 7, с выхода которого на вход 5, , блока 5 поступает сигнал, пропорциональный величине .K,ca,-vK,3;)(V,uV)- -чк. - 2.3-1 ., 2. .) Курц- коэффициент усиления тири сторного регулятора 6 напряжения. Как следует из приведенного выражения , в предлагаемом устройстве вво дится обратная связь по разности умноженных на постоянные коэффициенты квадратов токов статора и ротора. После суммирования этого сигнала обратной связи с выходным напряжением и.. блока А из этой суммы выходной си нал блока 5 поступает на вход тиристо ного регулятора 6 напряжения и обесп чивает формирование на его выходе напряжения U , лоступакэдего на статор двигателя 1: и,-к , (.,-(3,,:i)( Учитывая, что момент fl двигателя характеризуется следующей зависимост от напряжения статора U , скольжени S и синхронной скорости(Ус : 51Слд; а токи статора 1 и ротора 2 связан с моментом М выражениями а. MmcSr/RV 2./. . . (), :(з) г МШг i с« где ll2 фазное активное сопротивлени ротора, после подстановки вы3ажений (1), (3) и (4) в выражение (2)получим ЗкЧун 2, Таким образом, введение обратной связи по разности умноженных на постоянные коэффициенты квадратов токов статора и ротора двигателя обеспечивает линейную зависимость момента двигателя от сигнала его задания, что обеспечивает стабилизацию характеристик систем 1 управления, способствующую получе шю высокой точности и устойчивости этой системы. В то же время, предлагаемое устройство требует значительно меньшего количества нелинейных элементов и, соответственно,меньшего количества нелинейных операций над сигналами, что уменьшает инструментальную погрешность, способствуя повышению точности управления, и упрощает устройство управления. Формула изобретения Устройство для управления асинхронньм двигателем с фазным ротором, содержащее датчик тока статора и датчик тока ротора двигателя, блок перемножения, соединеннь1е последовательно блок задания момента двигателя, блок извлечения корня квадратного из входных сигналов и подкш ченный к статору двигателя тиристорный регулятор напряжения, отличающее с я тем, что, с целью упрощения и повышения точности управления, оно снабжено блоком сложения и блоком вычитания, два входа каждого из которых подключены к вьпсодам датчиков тока статора и ротора, а их выходы соединены со входами блока перемножения, выход которого подключен ко входу блока извлечения корня квадратного из суммы входных сигналов. Источники информации, принятые во внимание при экспе }тизе i. Петров И.И. и др. Электропривод автоматизация управления.строительными башеяными кранами. М., Машиностроение , 1979, с. 215, рис. 32. 2. Авторское свидетельство СССР о заявке № 2790981/24-07, л. Н 02 Р 5/28 от 05.07.79.
I I I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Устройство для определения момента асинхронного электродвигателя | 1979 |
|
SU864029A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU838563A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU824056A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU800881A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |