(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗАГРУЗКИ КОВША ДРАГЛАЙНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Устройство для определения загрузки ковша драглайна | 1978 |
|
SU747942A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОВШАДРАГЛАЙНА | 1971 |
|
SU308155A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
1
Изобретение относится .к одноковшовым экскаваторам и предназначено для определения загрузки ковша мощных драглайнов в процессе транспортировки ковша.
Известно устройство для определений загрузки ковша драглайна, содержапхее датчики усилий в этих канатах, блоки суммирования, амплитудные модуляторы, фазовые дискриминаторы, фазоврашатели, источник переменного напряжения, индикатор веса, причем выходы датчиков длин подъемного и тя oвoгo канатов вместе с выходом фазовращателя напряжения источника переменного напряжения подключены ко входу пер-, вого блока суммирования, выход которого соединен со входами двухканального регулятора, каждый канал которого образован последовательно включенными фазовым дискриминатором, интегратором и фазовращателем, выход которого подключен к первичной обмотке соответствующего поворотного трансформатора, а вторые входы фазовых дискриминаторов через фазовращатель соединены с источником переменного напряжения, при этом Вторичные обмотки поворотных трансформаторов соединены также со входами амплитудных модуляторов, другие
входы которых подключены к соответствующим датчикам усилий в подъемном и тяговом канатах, а выходы амплитудных модуляторов подключены ко второму блоку суммирования, выход которого подключен ко входу третьего блока суммирования вместе с выходами еще одного двухканального регулятора, каждый канал которого образован последовательно включенными фазовым дискриминатором, блоком интегрирорования и амплитудным модулятором, выход
которого соединен со входом третьего блока суммирования, причем вторые входы двух фазовых дискриминаторов и одного из двух амплитудных модуляторов двухканального регулятора соединены с выходом источника
переменного напряжения, вход второго амплитудного модулятора подключен к источнику переменного напряжения через фазовращатель, а выход первого амплитудного модулятора подключен ко входу индикатора веса 1.
Недостатками этого устройства являются его сложность и недостаточная точность, а также необходимость переналадки после замены канатов.
Наиболее близким к предложенному по технической сущности и достигаемому результату является устройство для определения загрузки ковша драглайна, содержащее датчики усилий в подъемном и тяговом канатах, подключенные к двум входам вычислительного блока, включающего узлы суммирования и перемножения 2.
Недостатками устройства являются его сложность и неточность, определяемая влиянием неизбежного в процессе работы драглайна вытягивания канатов. Кроме того, устройство требует переналадки после каждой замены канатов (а также при их вытягивании), что усложняет его эксплуатацию.
Целью изобретения является повышение точности и упрощение устройства.
Цель достигается тем, что устройство снабжено измерителем углов между осью стрелы драглайна и подъемным и тяговым канатами, подключенны.ми к двум другим входам вычислительного блока. Цри этом устройство имеет три варианта выполнения измерителя углов между осью стрелы драглайна и подъемным и тяговым канатами и соответственно вычислительного блока. По первому варианту измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами выполнены в виде двух соответствующих синусно-косинусных вращающихся датчиков, причем синусная и косинусная роторные обмотки датчика угла между осью стрелы драглайна и тяговым канато.м подключены к первичной и квадратурной обмоткам датчика угла между осью стрелы и подъемным канатом, синусная роторная обмотка которого подключена к одному из входов вычислительного блока, ко второму входу которого подключена косинусная роторная обмотка датчика угла между осью стрелы и тяговым канатом.
Вычислительный блок снабжен узлом перемножения-деления и двумя входными выпрямителями, выход одного из которых подключен ко входу перемножения узла перемножения-деления, ко второму входу пере множения которого подключен датчик усилия в подъемном канате, а выход делителя узла перемножения-деления соединен со вторым входным выпрямителем.
По второму варианту измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами выполнены в виде синусно-косинусного вращающегося датчика угла между осью стрелы драглайна и подъемным канатами, а вычислительный блок снабжен узлом преобразования постоянного напряжения в переменное и функциональным преобразователем, ко входам которого подключены датчик усилия в тяговом канате и выход одного из входных выпрямителей напряжения, выход второго вы-прямителя подключен ко входу узла суммирования, ко второму входу которого подключен выход функционального преобразователя, а узел преобразования постоянного напряжения в переменное входом соединен с датчиком усилий в подъемном канате, а выходом с датчиком угла между осью стрелы драглайна и подъемным канатом.
По третьему варианту измеритель углов
между осью стрелы драглайна и подъемным и тяговым канатами выполнен в виде двух сельсинных датчиков синусов углов между Осью стрелы и подъемным и тяговым канатами, а вычислительный блок снабжен дополнительным узлом перемножения, расположенным вместе с первым узлом перемножения на входе вычислительного блока и выходы обоих узлов перемножения соединены со входом суммирующего узла.
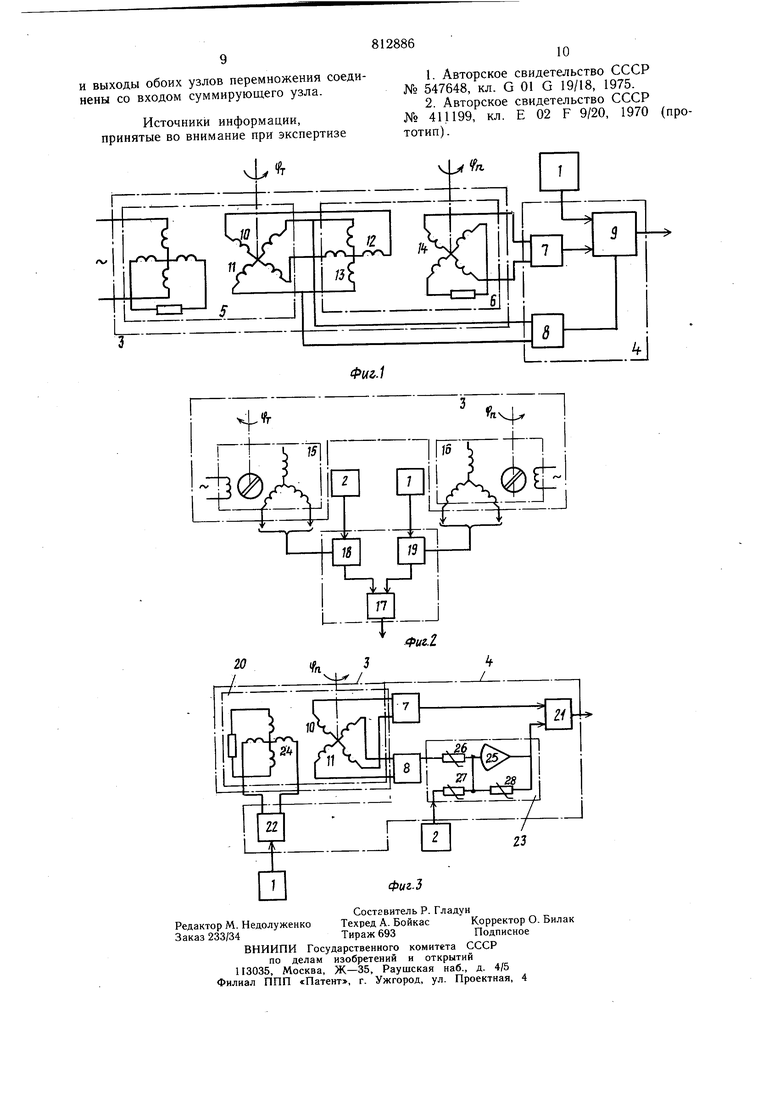
На фиг. 1-3 представлена принципиальная схема выполнения измерителя углов между осью стрелы драглайна и подъемным и тяговым драглайном и вычислительного блока, варианты 1-3.
Устройство содержит датчики 1 и 2
усилия в подъемном канате, измеритель 3 углов между осью стрелы драглайна и подъемным и тяговым канатами, подключенный ко входам вычислительного блока 4.
При этом по первому варианту исполнения измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами (фиг. 1) состоит из двух синусно-косинусных вращающихся датчиков 5 и 6 углов между осью стрелы драглайна и канатами тяговым и подъемным и вычислительный
0 блок 4 из двух выпрямителей 7 и 8 и блока 9 перемножения-деления, причем синусная 10 и косинусная 11 роторные обмотки первого синусно-косинусного вращающегося датчика 6 угла срт между осью стрелы и тяговым канатом подключены к первичной 12 и квадратурной 13 статорным обмотка.м второго синусно-косинусного вращающегося датчика 6 угла (рд между осью стрелы и подъемным канатом, синусная роторная обмотка 14 которого через первый выпрямитель 7 подключена к первому входу блеска 9 перемножения-деления, ко второму входу перемножения которого подключен выход датчика 5 усилия Fa в подъемном канате, а вход делителя этого блока через второй выпрямитель 8 соединен с косинусной роторной обмоткой 11 первого синусно-косинусного вращающегося датчика 5 угла между осью стрелы и тяговым канатом.
По второму варианту измеритель углоЬ 0 .между осью стрелы драглайна и подъемным и тяговым канатами (фиг. 2) состоит из двух сельсинных датчиков 15 и 16 синусов углов между осью стрелы драглайна и канатами подъемным и тяговым, а вычислительный блок из блока 17 суммирования и двух блоков 18 и 19 перемножения. Причем выходы указанных сельсинных датчиков 15 и 16 подключены к первым входам первого 18 и второго 19 блоков перемножения, вторые входы которых соединены с выходами соответственного первого 1 и второго 2 датчиков усилий в подъемном и тяговом канатах, а их выходы подключены ко входам блока 17 суммирования.
По третьему варианту измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами (фиг. 3) состоит из одного синусно-косинусного вращающегося датчийа 20 угла между осью стрелы угла драглайна и подъемным канатом, а вычислительный блок состоит из блока 21 суммирования, блока 22 преобразования постоянного напряжения в переменное, двух выпрямителей 7 и 8 и функционального преобразователя 23.
При этом выход первого датчика 1 усилия в подъемном канате через блок 22 преобразования постоянного напряжения в переменное подключен к первичной обмотке
24синусно-косинусного вращающегося датчика 20 угла между осью стрелы драглайна и подъемным канатом, синусная выходная обмотка 10 которого через первый выпрямитель 7 подключена ко входу блока 21 суммирования, а его косинусная выходная обмотка 11 подключена через второй выпрямитель 8 к первому входу функционального преобразователя 23 извлечения корня квадратного из алгебраической суммы квадратов входных сигналов, второй вход которого соединен с выходом второго датчика 2 усилия в тяговом канате, а его выход подключен ко входу блока суммирования 21
Функциональный преобразователь 23 извлечения корня квадратного из алгебраической суммы квадратов входных сигналов может быть выполнен, например, в виде операционного усилителя 25 и нелинейных резисторов с параболической характеристикой 26, 27, 28, включенных на его входе и в цепи обратной связи. Входные нелинейные резисторы 26 и 27 обеспечивают формирование на входе операционного усилителя
25квадратов входных сигналов, а нелинейный резистор 28 в цепи его обратной связи обеспечивает извлечение корня квадратного.
Работает устройство по первому варианту следующим образом.
Выходные напряжения синусной 10 и косинусной 11 роторных обмоток первого синусно-косинус ого вращающегося датчика 5 угла между осью стрелы и тяговым канатом, пропорциональные синусу и косинусу этого угла, подаются на взаимно перпендикулярные первичную 12 и квадратурную 13 статорные обмотки второго синусно-косинусного вращающегося датчика 6 угла между осью стрелы и подъемным канатом. Благодаря этому, в магнитопроводе второго синусно-косинусного датчика 6 создается магнитный поток, величина которого постоянна., угол между вектором этого потока и статорными обмотками указанного датчика равен углу поворота ротора первого синуснокосинусного вращающегося датчика 5. При этом угол между вектором магнитного потока и магнитной осью синусной роторной обмотки 14 второго синусно-косинусного вращающегося датчика 6 равен сумме угS лов поворота роторов датчиков 5 и 6, вследствие чего выходное напряжение второго синусно-косинусного вращающегося датчика 6, снимаемое с его синусной роторной обмотки 14, пропорционально величине sin (ipn+ фт)- Это напряжение после выпрямления умножается на выходное напряжение датчика 1 усилия Fn в подъемном канате И делится на выпрямленное напряжение, снимаемое с косинусной роторной обмоткк11 первого синусно-косинусного вращающегося датчика 6 ч пропорциональное ве5личине cos (фл-ot), где ot - угол наклона стрелы к горизонту, в результате чего на выходе блока 9 перемножения-деления получают сигнал, пропорциональный весу ковща
0„ Fn-S.n.()
-СобСЧ т-«А)
тем самым обеспечивая определение загрузки ковша при любом его положении.
Начальная фаза -ct выражении
5 cos (р.- оС) обеспечивается предварительным сдвигом ротора первого синусно-косинусного вращающегося датчика 6 на угол d. На такой же угол в противоположном направлении смещается ротор второго синусно-косинусного вращающегося датчика 7
0 для исключения влияния этой начальной фазы на величину sin (( (.
По второму варианту устройство работает следующим образом.
Выходные напряжения сельсинных датчиков 15 и 16 пропорциональны соответ5ственно выражениям
Sitvln Strv т .
где (рп и «рт - углы между осью стрелы и канатами подъемным и тяговым.
Указанные выходные сигналы сельсин0ных датчиков 15 и 16 умножаются на выходные сигналы соответственно первого датчика 1 усилия .Е,. в тяговом канате, а результаты этого перемножения поступают на входы блока 3 суммирования, выходной сигнал которого при этом пропорционален весу ковша Р, причем указанный сигнал поступает непрерывно в процессе транспортировки ковша независимо от его положения, а поскольку вес порожнего ковша известен, при этом определяется вес
грунта в ковше.
Рабата по третьему варианту осуществляется следующим образом.
Напряжение, поступающее с выхода преобразователя 22 постоянного напряжения в переменное на первичную обмотку 24 еинусно-косинусного вращающегося датчика 5 угла ф между осью стрелы драглайна и подъемным канатом, пропорционально величине усилия F в подъемном канате, измеряемого с помощью датчика 1 этого усилия. При этом выходные напряжения на вторичных синусной 10 и косинусной 11 обмотках синусно-косинусного вращающегося датчика 5, ротор которого повернут относительно нулевого положения (при 0) на угол Ы наклона стрелы драглайна к горизонту, пропорциональны соответственно величинам Fn-sin (ф„+с/1) и Fn-cos (). Выпрямленное выходное напряжение косинусной обмотки 11 и выходное напряжение второго датчика 2 усилия F, в тяговом канате с разными знаками подают соответственно на первый и второй входы функционального преобразователя 23 извлечения корня квадратного из алгебраической суммы входных сигналов, выходное напряжение которого при этом пропорционально величине Jf -F -Cos4%M)- Суммирование этого напряжения с выпрямленным выходным напряжением синусной обмотки 10 позволяет получить на выходе блока 21 сигнал суммирования, пропорциональный весу ковша драглайна Р у ч-Рп-Со8Ч% - У- Fn-Sin Mn.X) И тем самым определяет загрузку ковша, поскольку вес порожнего ковша известен. Предлагаемое устройство проще известных устройств аналогичного назначения, а поскольку вытягивание канатов не оказывает влияния на выходные сигналы синусно-косинусного вращающегося датчика угла между осью стрелы и подъемным канатом (Б отличие от используемых в известных устройствах датчиков длин канатов, где это влияние может быть существенным), тем самым исключается вызываемая вытягиванием канатов ошибка определения загрузки ковша. Таким образом, устройство позволяет упростить и повысить точность определеНИН- загрузки ковша драглайна. Кроме того, оно не требует переналадки после замены канатов (и при их вытягивании), что упрощает его эксплуатацию, уменьшает время, необходимое для его обслуживания, что способствует повышению производительности драглайна, а также уменьшает вероятность появления дополнительных субъективных ошибок, которые могут возникнуть при частых переналадках. Формула изобретения 1. Устройство для определения загрузки ковща драглайна, содержащее датчики усилий в подъемном и тяговом канатах, подключенные к двум входам вычислительного блока, включающему узлы суммирования и перемножения, отличающееся тем, что, с целью повышения точности и упрощения устройства, оно снабжено измерителем углов между осью стрелы драглайна и подъемным и тяговым канатами, подключенными к двум другим входам вычислительного блока. 2.Устройство по п. 1, отличающееся тем, что измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами выполнен в виде двух соответствующих синусно-косинусных вращающихся датчиков, причем синусная и косинусная роторные обмотки датчика угла между осью стрелы драглайна и тяговым канатом подключены к первичной и квадратурной обмоткам датчика угла между осью стрелы и подъемным канатом, синусная роторная обмотка которого подключена к одному из входов вычислительного блока, ко второму входу которого подключена косинусная роторная обмотка датчика угла между осью стрелы и тяговым канатом. 3.Устройство по пп. 1 и 2, отличающееся тем, что вычислительный блок снабжен узлом перемножения-деления и двумя входными выпрямителями, выход одного из которых подключен ко входу перемножения узла перемножения-деления, ко второму входу перемножения которого подключен датчик усилия в канате, а выход делителя узла перемножения-деления соединен со вторым входным выпрямителем. 4.Устройство по п. 1, отличающееся тем, что измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами выполнен в виде синусно-косинусного вращающегося датчика угла между осью стрелы драглайна и подъемным канатом. 5.Устройство по пп. I, 3 и 4, отличающееся тем, что вычислительный блок снабжен узлом преобразования постоянного напряжения в переменное и функциональным преобразователем, ко входам которого подключены датчик усилия в тяговом канате и выход одного из входных выпрямителей, выход второго выпрямителя подключен ко входу узла суммирования,КО второму входу которого подключен выход функционального преобразователя, а узел преобразования постоянного напряжения в переменное входом соединен с датчиком усилий в подъемном канате, а выходом с датчиком угла между осью стрелы драглайна и подъемным канатом. 6.Устройство по п. 1, отличающееся тем, что измеритель углов между осью стрелы драглайна и подъемным и тяговым канатами выполнен в виде двух сельсинных датчиков синусов углов между осью стрелы и подъемным и тяговым канатами. 7.Устройство по пп. 1 и б, отличающееся тем, что вычислительный блок снабжен дополнительным узлом перемножения, расположенным вместе с первым узлом перемножения на входе вычислительного блока
и выходы обоих узлов перемножения соединены со входом суммирующего узла.
Источники информации, принятые во внимание при экспертизе
№ 411199, кл. Е 02 F 9/20, 1970 тотип).
