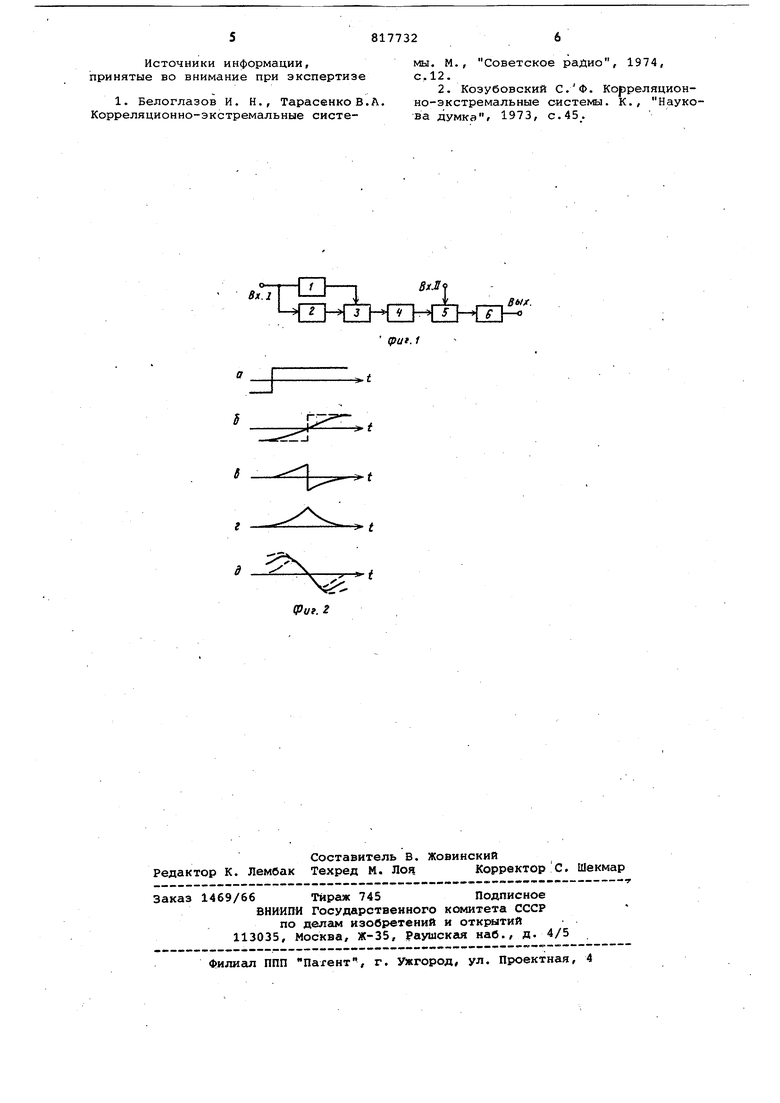
диаграммы, характеризующие заявляемое устройство. Устройство содержит линию 1 задер ки, филРгр 2 низких частот, вход которого соединен со входом линии 1 за держки , блок 3 вычитания, первый вхо которого соединен с выходом линии 1 задержки, а второй - с выходом фильт ра 2 нижних частот, интегратор 4, вход которого соединен с выходом бло ка 3 вычитания, блок 5 умножения,вхо которого соединен с выходом интегратора 4, интегратор 6, вход которого соединен с выходом умножения. Устройство работает следующим образом. Один из двух сопоставляемых входных сигналов, представленный на фиг. 2а перепадом напряжения, воздействует одновременно на входы линии 1 задержки и фильтра 2 нижних частот. Время задержки сигнала в линии 1 задержки установлено равным времени задержки сигнала в фильтре 2 нижних частот, поэтому сигналы на их выходах представлены соответственно пунктирной и сплошной линиями (фиг.2 Их вычитание блоком 3 вычитания дает конечную разность вторюго порядка (фиг. 2в), Интеграл от конечной разности второго порядка, фо 7мируемый интегратором 4 и показанный на фиг. 2г, в отличие от конечной разно ти первого порядка, формируемой в известном устройстве, является несмешенной функцией вычитаемых сигналов (фиг. 2б). В этом отношении пред лагаемый дискриминатор подобен известным дискриминаторам с вычислением производной, которая также является несмешенной функцией. Однако в отличие от последних преимущество достигается без потери помехоустойчивости, так как предлагаемый дискри минатор временного сдвига, как и известный Сз оперирует только с конечными разностями. При подаче интеграла от конечной разности второго порядка (фиг. 2г) на один из входов блока 5 умножения, а второго из сопоставляеких сигналов на другой вход, на выходе блока 5 формируется сигнал, зависящий от взаимного временного сдвига сопоставляемых сигналов. Например, если второй из сопоставляемых сигналов представить так, как показано пунктиром на фиг. 26, то до момента поступления фронта произведение отри цательно, а после - положительно.Интеграл от произведения, вычисляемый интегратором 6, равен нулю. Если же имеет место временной сдвиг, то положительные и отрицательные сигналы действуют на входе интегратора б разное время, так что результат интегрирования оказывается не нулевым, причем знак результата определяет на правление сдвига. При поступлении отрицательного перепсща напряжения изменяются знаки обоих сигналов, подводимых к блоку 5 умножения, так что зависимость знака результата интегрирования от направления сдвига сохраняется прежней. Получаемая дискриминаторная характеристика показана на фиг. 2д. Если интервал корреляции сопоставляемых сигналов изменяется, то зто отражается преимущест-, венно на периферийных участках дискриминаторной характеристики (например как показано пунктиром на фиг. 2д), а крутизна дискриминаторной характеристики на центральном участке не претерпевает существенных изменений. Таким образом, обеспечивается достижение указанной выше цели. Эффект от применения предлагаемого дискриминатора временного сдвига обусловлен тем, что он сочетает достоинства дифференциальных дискриминаторов и дискриминаторов с вычислением производной. Подобно первым он обладает повышенной помехоустойчивостью, и, подобно вторым, обладает улучшенной точностью за счет увеличенной стабильности дискриминаторной характеристики при работе с нестационарными входными сигналами. Такое сочетание достоинств особенно необходимо в системах совмещения изображения, например, в системах совмещения растров цветных телевизионных камер и в системах технологического позиционирования, поскольку сигналы изображений характеризуются выраженным свойством нестационарности. Внедрение предлагаемого дискриминатора временного сдвига позволит создавать надежно работающие системы совмещения изображений, что в конечном счете способствует развитию техники телевидения и техники автоматизации производственных процессов. Формула изобретения Корреляционный дискриминатор временного сдвига, содержащий первый интегратор, линию задержки, вход которой является первым входом дискриминатора, а выход подключен к первому входу блока вычитания, блок умножения, первый вход которого является вторым входом дискриминатора, а выход соединен со входом второго интегратора, отличающийся тем, что, с целью повышения точности при обработке нестационарных сигналов, в дискриминатор введен фильтр низких частот, вход которого соединен с первым входом дискриминатора, а выход подключен ко второму входу блока вычитания, выход которого через первый интегратор по-,ключен ко второму входу блока умножения. Источники информации, принятые во внимание при экспертизе 1. Белоглазов И. Н., ТарасенкоВ.Л. Корреляционно-экстремальные системы. М., Советское радио, 1974, с, 12. 2. Козубовский С.Ф. Корреляционно-экстремальные системы. К., Наукова думка i 1973, с.45.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционное устройство для определения времени задержки | 1983 |
|
SU1101837A1 |
| Корреляционный измеритель скорости проскальзывания | 1983 |
|
SU1083119A1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С НЕПРЕРЫВНОЙ ФАЗОЙ | 2006 |
|
RU2323536C1 |
| ВРЕМЕННОЙ ДИСКРИМИНАТОР | 1987 |
|
RU2042148C1 |
| ЦИФРОВОЙ ВРЕМЕННОЙ ДИСКРИМИНАТОР | 2011 |
|
RU2445728C1 |
| СПОСОБ МНОГОПАРАМЕТРИЧЕСКОГО СЛЕЖЕНИЯ ЗА НАВИГАЦИОННЫМИ СИГНАЛАМИ И ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С МНОГОПАРАМЕТРИЧЕСКИМ УСТРОЙСТВОМ СЛЕЖЕНИЯ ЗА СЛАБЫМИ СИГНАЛАМИ В УСЛОВИЯХ СВЕРХВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2012 |
|
RU2551805C2 |
| Корреляционный измеритель скорости | 1979 |
|
SU890251A1 |
| Корреляционный измеритель скорости | 1984 |
|
SU1163271A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
Вх.1
(Риг.2
BUf.
