(54) МНОГОПОЗИЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ
чей поверхности зуба храпового коле-; са.
Обе собачки установлены с возможностью взаимодействия с одним и тем же зубом зсрапового колеса.
. Пружина стопорной собачки установлена так, что направление ее усилия параллельно плоскости, проходящей через ось,стопорной собачки, перпендикулярной рабочей поверхности зуба храпового колеса, взаимодейству -);ей со стопорной собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса.
Рабочая поверхность направляющего элемента выполнена под углом 45 относительно плоскости, проходящей через осЬ рабочей собачки, перпендикулярной рабочей поверхности зуба храпового колеса, взаимодействующего с рабочей собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса.
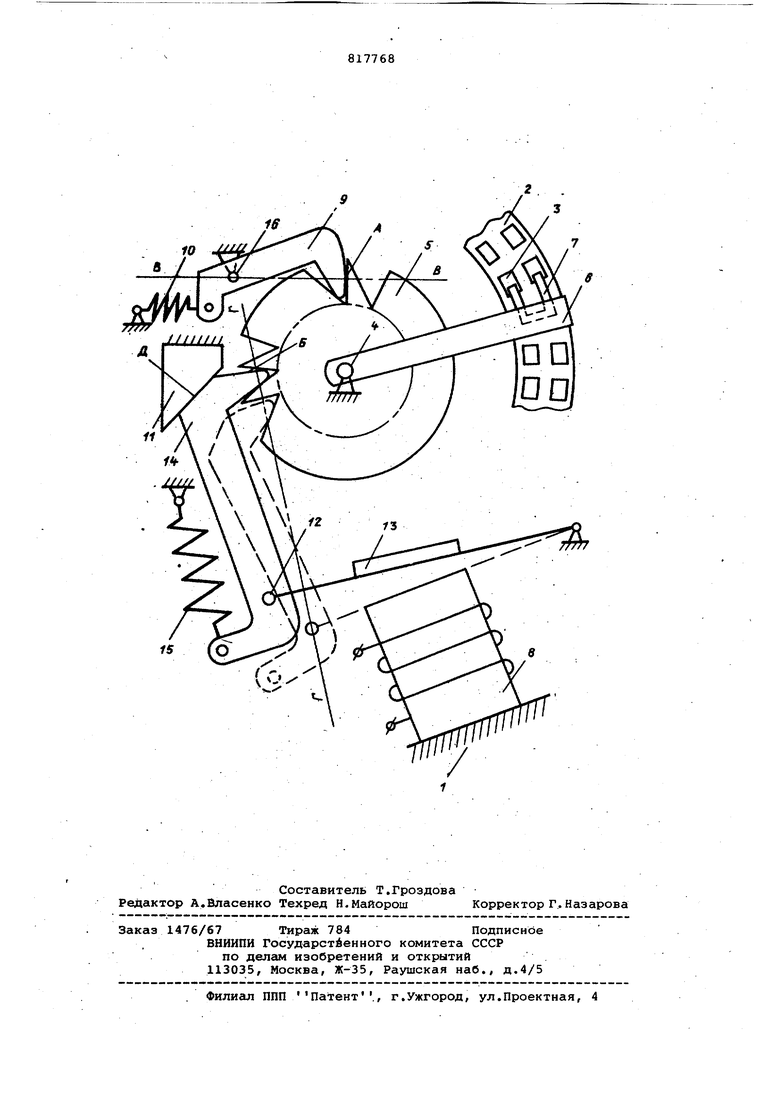
На чертеже изображен многопозиционный переключатель.
На корпусе 1 установлен один или несколько дисков 2 с ламелями 3, вал 4, на котором укреплено храповое колесо 5 и траверсы 6 с контактньпли элементами 7, электромагнит 8 и механизм переключения храпового колеса 5, состоящий из укрепленных на корпусе 1 стопорной собачки 9 с пружиной 10, направляющей элемента 11 и установленной на оси 12 якоря 13 электромагнита 8 рабочей собачки 14 с пружиной 15.
Рабочие поверхности А и Б соответственно собачек 9, 14 выполнены так, что их направляющими являются окружности, центры которых совпадают с осями 16 и 12 и расположены в плоскостях В-В и Г-Г, перпендикулярных рабочей поверхности зубьев храпового колеса 5, взаимодействующих с собачками 9, 14 и проходящих через среднюю линию рабочей поверхности зубьев храпового колеса. При выполнении указанного условия для стопорной собачки не требуется дополнительный люфт хода храпового колеса 5,обеспечиваюсций надежное западание стопорной . собачки 9 в межзубцовый паз. Для рабочей собачки выполнение указанного условия уменьшает ход якоря 13 электромагнита 8, необходимый для отраб4, шага храповым колесом 5.
Кроме того, уменьшается истирание и износ трущихся поверхностей, то обеспечивает требуемую кинематическую погрешность в течение большого срока службы прибора.
Положение плоскостей В-В и Г-Г определено для подпружиненной собачки 14 в начале, а для стопорной собачки 9 - в конце хода храпового олеса 5 в пределах отработки одного ва. При этом в момент наибольших силий, нагружающих собачки 9, 14
направления указанных усилий совпадают с нормалями В-В и Г-Г, т.е. проходят через центры вращения собачек 9, 14. Стопорная собачка 9 и рабочая собачка 14 взаимодействуют с одним зубом храпового колеса 5. Это исключает входящий в кинематическую погрешность люфт хода храпового колеса 5, компенсирующий кинематическую ошибку изготовления зубьев храпового колеса 5.
Направление действия пружины 10 стопорной собачки 9 совпадает с направлением фиксации храпового колеса 5, что исключает из суммарйой кинематической ошибки радиальный зазор между осью 16 и стопорной собачкой 9. .
. Угол между рабочей поверхностью Д направляющего элемента 11 и плоскостью, проходящей через ось рабочей собачки, перпендикулярной рабочей поверхности зуба храпового колеса, взаимодействующего с рабочей собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса, равен 45° и близок к 45° .
Это условие сводит до минимума увеличение динамического выбега подпружиненной собачки 14, а, следовательно, храпового колеса 5 при увеличении за счет износа гарантированного зазора между поверхностью Д и взаимодействующей с ней поверхностью подпружиненной собачки 14.
Переключатель работает следующим образом.
При залитке электромагнита 8 и притяжений якоря 13 рабочая собачка 14 выходит из межзубцового паза храпового колеса .§ и заскакивает в следующий межзубцовый паз храпового колеса 5, осуществляя введение механизма переключения храпового колеса 5, стопорение которой осуществляется стопорной собачкой 9 с пружиной 10. После снятия напряжения с обмотки электромагнита 8 под действием пружины 15 якорь перемещает рабочую собачку 14 до соударения последнего с направляющим элементом11, при этом храповое колесо 5 поворачивается на величину угловогсэ шага.
При повороте связанной через вал 4 с храповым колесом 5 траверсы 6 с контактными элементами 7, последние замыкают ламели 3 диска 2, осуществляя коммутацию очередной цепи переключателя. Очевидно, количество ламелей, а следовательно количество коммутируемых цепей прибора при заданном весе и габарите последнего определяется кинематическими точностями работы механизма переключения храпового колеса 5.
Формула изобретения 1. Многопозиционный переключатель содержащий корпус, на котором установлен по крайней мере один диск с ламелями, вал с укрепленным на нем храповым колесом, рабочая поверхность зубьев которого представляет собой плоскость, и траверсой с конTaKTHi MH элементами, электромагнит и механиэм переключения храпового колеса, состоящий из направлякмцего элемента, укрепленного на корпусе, и рабочей собачки с пружиной, установленной на оси якоря электромагни та,.отличающийся тем, что, с целью повышения кинематической точности, механизм переключения храпового колеса снабжен стопорной собачкой с пружиной, установленной на корпусе, рабочие поверхности упо мянутых собачек выполнены так, чтЬ их направляющими являются окружности, центр каждой из которых совпада ет с осью вращения соответствующей собачки, при этом ось вращения каждои собачки размещена в плоскости, перпендикулярной рабочей поверхност зуба храпового колеса, взаимодейств ющей с этой собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса. 2. Переключатель по,п.1, отли чающийся тем, что обе собач ки установлены с возможностью взаимодействия с одним и тем же зубом храпового колеса. 3.Переключатель по п.1 или 2, отличающийся тем, что пружина стопорной собачки установлена так, что направление ее усилия параллельно плоскости, проходящей через ось стопорной собачки, перпендикулярной рабочей поверхности храпового колеса, взаимодействующей со стопорной собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса. 4.Переключатель по пп. 2 или 3, отличающийс я тем, что рабочая поверхность направляющего элемента выполнена под углом 45 относительно плоскости, проходящей через ось рабочей собачки, перпендикулярной рабочей поверхности зуба храпового колеса, взаимодействующего с рабочей собачкой и проходящей через среднюю линию рабочей поверхности зуба храпового колеса. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 527755, кл. Н 01 Н 13/40, 1975. 2.Авторское свидетельство СССР 413542, кл. Н 01 Н 15/02, 1970.
16
10
IS
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ МНОГОПОЗИЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1965 |
|
SU174683A1 |
| Устройство для подачи штучных заготовок из магазина | 1983 |
|
SU1159697A1 |
| Бесступенчатый колод очно-ременный вариатор скорости | 1959 |
|
SU127119A1 |
| Товарный регулятор ткацкого станка | 1987 |
|
SU1481293A1 |
| Храповой механизм реверсивногодействия | 1972 |
|
SU508621A1 |
| Устройство преобразования качательного движения в одностороннее вращательное путем реализации заданного алгоритма подачи управляющих импульсов | 2024 |
|
RU2837540C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2310786C1 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ СКОРОСТИ | 2000 |
|
RU2267671C2 |
| Высокочастотный выключатель | 1979 |
|
SU817789A1 |
| Вибросмеситель | 1986 |
|
SU1417912A1 |