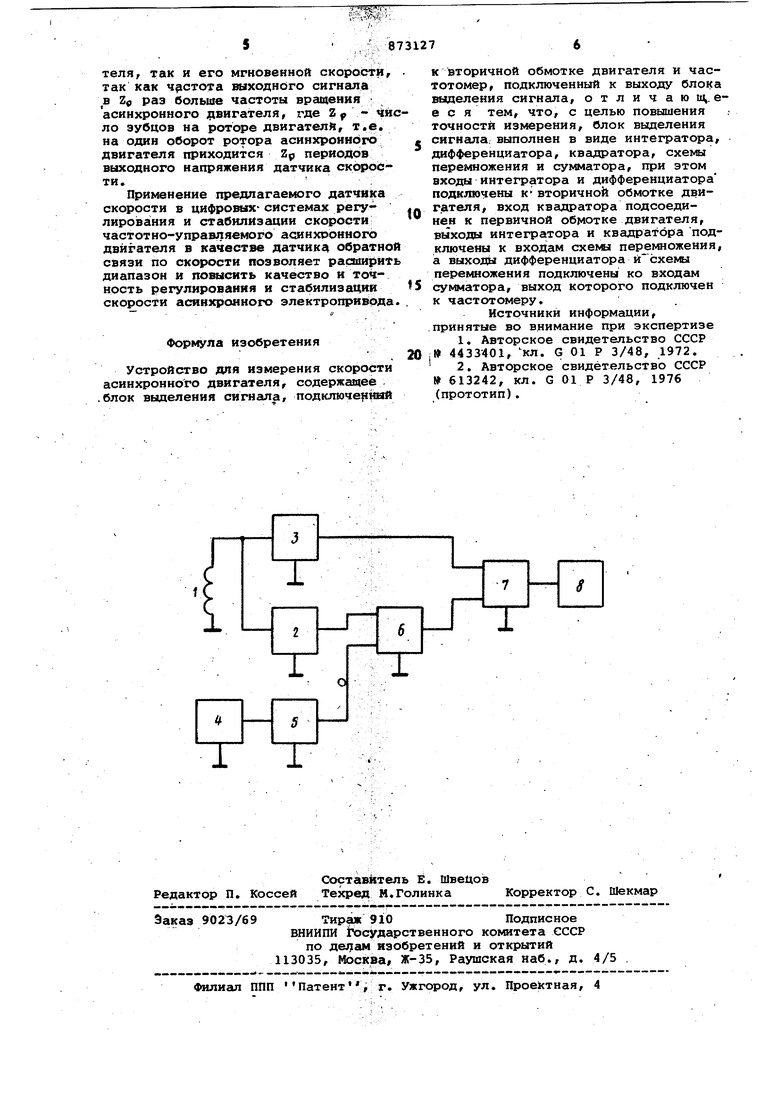
ной обмотке двигателя, вход квадрато ра подключен к первичной обмотке, двигателя, выходы интегратора и кващ ратора подключены к входам схемы перемножения, а выходы дифференциаTftpa и схемы перемножения подключен йо-входам сумматора, выход которого подключен к частотомеру. На чертеже приведена блок-схема датчика скорости асинхронного двигателя. Датчик скорости асинхронного двигателя состоит из дополнительной обмотки 1 статора асинхронного двигателя, интегратора 2, блока дифференцирования 3, датчика част1эты, подводимого к статору 4 двигателя напряжения, квадратора 5, блока перемножения 6, cyNwaTopa 7, частотомера 8.. Датчик скорости асинхронного двигателя работает следующим образом. В дополнительной обмотке 1, расположенной в статоре асинхронного двигателя, наводится ЭДС, определяе мая суммой двух гармоник cosа)+Е„,с05 Zp uJv- , И) где t(t) - гармоника, частота которой UJ определяется частотой подводимого к статору двигателя напряжения, а амплитуда равна ert(t) - гармоника, частота которой определяется произведением частоты вращегния ротора wij и числом зубков ротора,Zp, ее амплитуда равна Е,. Таким образом, частота гармонической e/j.) пропорционсшьна ско- рости вращения ротора и наводится в дополнительной обмотке 1 за счет влияния пазов и зубцов на поверхнос ти ротора двигателя. Так как их амп литуды много, меньше учтенных (1), т ЭДС (1), снимаемая с Дополнительной обмотки 1, поступает на входы интег ратора 2 и блока дифференцирования С,выхода интегратора 2.получаем сиг нал, который определяется выражением i t-4 E cosiu icSttJE cosZp j.tat rlSlS5nlU,t+ S-in Zpiyf.t. Этот сигнал поступает на один из входов блока перемножения 6. Одновременно с выхода датчика частоты, подводимого к статору двигателя напряжеиия 4, на вход квадратора 5 по ступает сигнал, амплитуда которого пропорциональна частоте подводимого к статору двигателя напряжения и). в квадраторе 5 этот сигнал возводится в квадрат и поступает на второй вход блока перемножения 6. С выхода блока перемножения 6 получаем сигнал, определяемый с учетом (2) вьфсркением cjuHe(t)at i«iErt 3 nuj t+j sinzpiu t. (3) Этот сигнал с выхода блока перемножения 6 поступает на один из входов сумматора 7.Одновременно на другой вход сумматора 7 поступает сигнал с выхода блока дифференцирования 3,который определяется как производная по времени А. e(t)-uu,e sitia),tt2paj.,s nzpai t .(4) В сумматоре 7 сигналы, определяемые вьф згдаениями (3) и (4) ,складываются. Б результате на выходе сумматора 7 имеем. u.eWcft «W tv. -z,u,. Из (5) видно, что в сумматоре 7 гармонические, частота которых пропорциональна частоте подводимого к статору двигателя напряжения, уничтожгиотся, и на выходе сумматора 7 получаем переменное напряжение, частота которого пропорциональна скорости вршдения двигателя . Это напряжение поступает на вход частотомера 8,- который выдает информацию о величине скорости асинхронного двигателя. Основные блоки устройства (интегратор 7, блок дифференцирования 3, квадратор 5, блок перемножения б, сумматор 7) выполняются на базе операционных усилителей. Измерительная обмотка может быть уложена в пазы статора, в которых находится рабочая обмотка, охватывая один или два зубца статора, или может быть наклеена к одному из зубцов статора двигателя. Применение предлагаемого датчика скорости асинхронного двигателя Не требует применения дополнительной электрической машины на валу асинхронного двигателя, позволяет получить сигнал, частота которого пропорциональна скорости вращения асинхронного двигателя. Это позволяет существенно повысить точность измерения средней скорости асинхронного двигателя, так и его мгновенной скорости, так как частота выходного сигнала в Zo раз больше частоты вращения ; асинхронного J lвигateля, где Zf - 4й ло зубцов на роторе двигателя, т.е. на один оборот ротора асинхроннЬгЬ двигателя приходится Zp периодов выходного напряжения датчика скоройТИ.,, , Применеиие предлагаемого датчика скорости в цифровых- системах регулиро 9а:ния и стабилизации скорости частотно-управляемого асинхронного двигателя в качестве датчику обратно связи по скорости позволяет расширит диапазон и повысить качество и точность регулирования и стабилизации скорости асинхронного электропривода Формула изобретения Устройство для измерения скорости асинхронного двигателя, содержателе .блок выделения сигнсша, подключе|11Шй к вторичной обмотке двигателя и частотомер, подключенный к выходу блока выделения сигнала, отличаю щ. ее с я тем, что, с целью повышения точности измерения, блок выделения сигнала: выполнен в виде интегратора, дифференциатора, квадратора, схемы перемножения и сумматора, при этом входы интегратора и дифференциатора подключены к вторичной обмотке двиг.ателя, вход квадратора подсоедиHeji к первичной обмотке двигателя, выходы интегратора и квадратора подключены к входам схели перемножения, а выходил дифференциатора и схемы перемножения подключены ко входам сумматора, выход которого подключен к частотомеру. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 4433401, кл. G 01 Р 3/48, 1972. 2. Авторское свидетельство СССР 613242, кл. G 01 Р 3/48, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| Электропривод | 1978 |
|
SU864478A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
