1
Изобретение относится к обработ ке металлов давлением и, в частное- . ти, может быть использовано в системах управления электроприводами намоточных устройств агрегатов продольной резки полос.
Известно .устройство для намотки полос, содержащее намоточный барабан с ведущим валом и установленными на нем намоточными гильзами с фрикционньзми элементами, привод вращбния ведущего вала, датчик скорости ведущего вала и датчик скорости одной из намоточных гильз, выполненных в виде тахог енераторов, регулятор обгойа, эадатчик обгона, связанный с одним из. входов регулятора обгона .
Однако использование этого устройства связана С трудностями сочленений тахогенератора с гильзой. Кроме того, использование тахогенераторов в качестве датчиков скорости не обеспечивает необходимой точности поддержания a6cojHOTHoro значения скольжения ведущего вала и гильзы.
Известно также устройство для уп.равления электроприводом при нгмотке нескольких лент, содержащее последовательно соединенные и электрически Jcвязaниыe датчики импульсов ведущего
вала и гильзы, датчик скорости полосы, регулятор скоррсти и регулятор тока, преобразователь частоты и задатчик обгона рД.
Повышение надежности работы в этом устройстве достигается заменой измерителей скорости (тахогенераторов) ведущего вала и гильзы соответственно датчиками импульсов и преоб0разователями частоты в напряжение. Устройство не позволяет обеспечить поддержание величины обгона на заданном уровне во всем диапазоне изменения скорости приводного злектродвига
5 теля по причине неточности преобразования частоты в напряжение при ее изменении в больших пределах. Кроме того, одноконтурная схема регулирования не обеспечивает необходимых показа0телей динамики в переходных режимах.
Цель изобретения - повышение точности и качества регулирования.
Указанная цель достигается тем, что устройство снабжено преобразова5телем кода в напряжение, реверсивным счетчиком с блоком сложения и блоком вычитания, сумматором частот и гене.ратором частот, а выход задатчика обгона соединен с первым входом преобразователя частоты, второй вход последнего соединен с выходом генератора частоты, выход преобразователя частоты соединен с первым входом сумматора частот, второй вход сумматора частот соединен с выходом датчика импульсов гильзы, выход сумматора частот соединен со входом блока сложения реверсивного счетчика, причем вход блока, вычитания реверсивного счетчика соединен с выходом ;датчика импульсов ведущего вала, а вьЬсоД: соединен со входом преобразователя кода в напряжение, выход которого соединен с первым входом регулятора скорости.
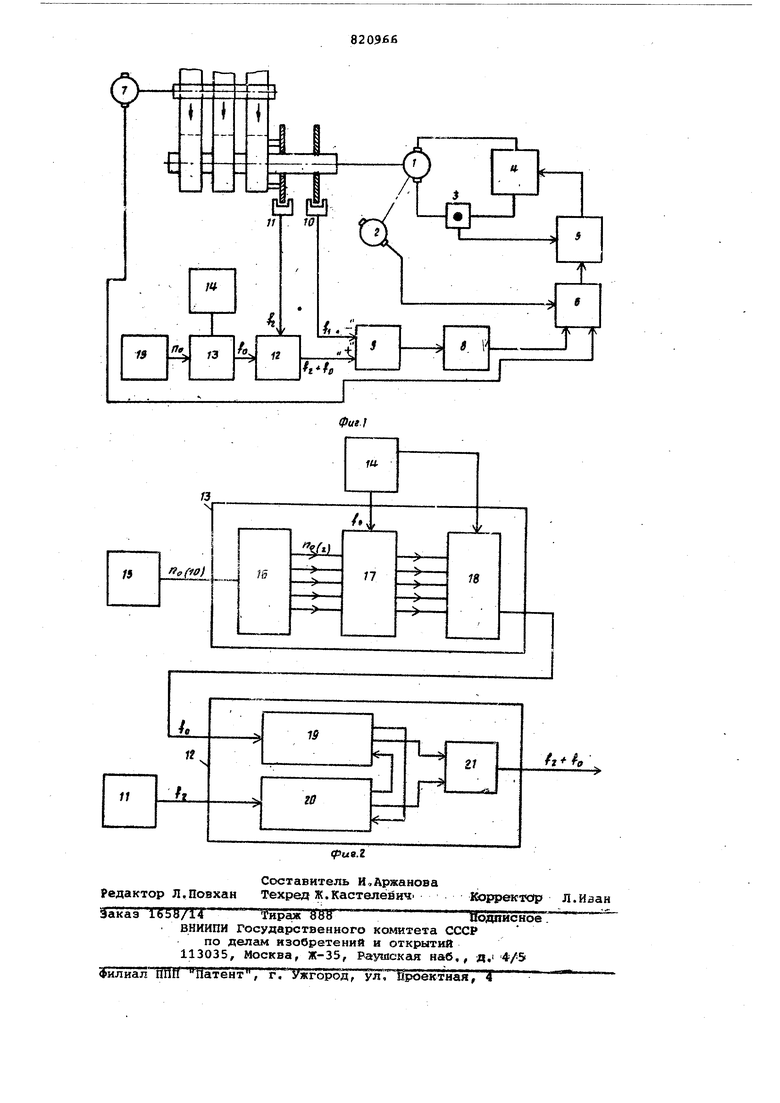
На фиг. 1 представлена блок-схема предлагаемого.устройства; на фиг. 2уэлы 12 и 13 в развернутом виде.
Устройство содержит электр®двигатель 1, датчик 2 скорости, датчик 3 тока, усилитель 4 мощности, регулятор 5 тока, регулятор 6 скорости, датчик 7 скорости полосы, преобразователь 8 кода в напряжение, реверсивный счетчик 9 с блоком сложения и блоком вычитания, датчик 10 импульсов ведущего вала датчик 11 импульсов гильзы, сумматор 12. частот, преобразователь 13.частоты, генератор 14 частоты, цифровой задатчик 15 обгона, причем выходы усилителя мощности непосредственно и через датчик 3 тока соединены со входами электродвигат.еля 1, вал которого кинематически связан с датчиком скорости 2, выход которого соединен с третьим входом регулятора 6 скорости, второй вход которого соединен с выходом датчика 7 скорости полосы, выход соединен с первым входом регулятора 5 тока, второй вход которого соединен с выходом датчика 3 тока; а выход со входом усилителя 4 мощности, выход цифрового эадатчика 15 обгона соединен с первым входом преобразователя 13 частоты, второй вход которого соединен с выходом генератора 14 частоты, а выход - с первкм входом сумматора 12 частот, второй вход которого соединен с выходом датчика 11 импульсов гильзы, а выход - со входом блока сложения реверсивного счетчика 9, вход блока вычитания которого соединен с выходом датчика 10 импульсов ведущего вала/ а выход - со входом преобразователя 8 кода в напряжение, выход которого соединен с первым входом регулятора 6 скорости.
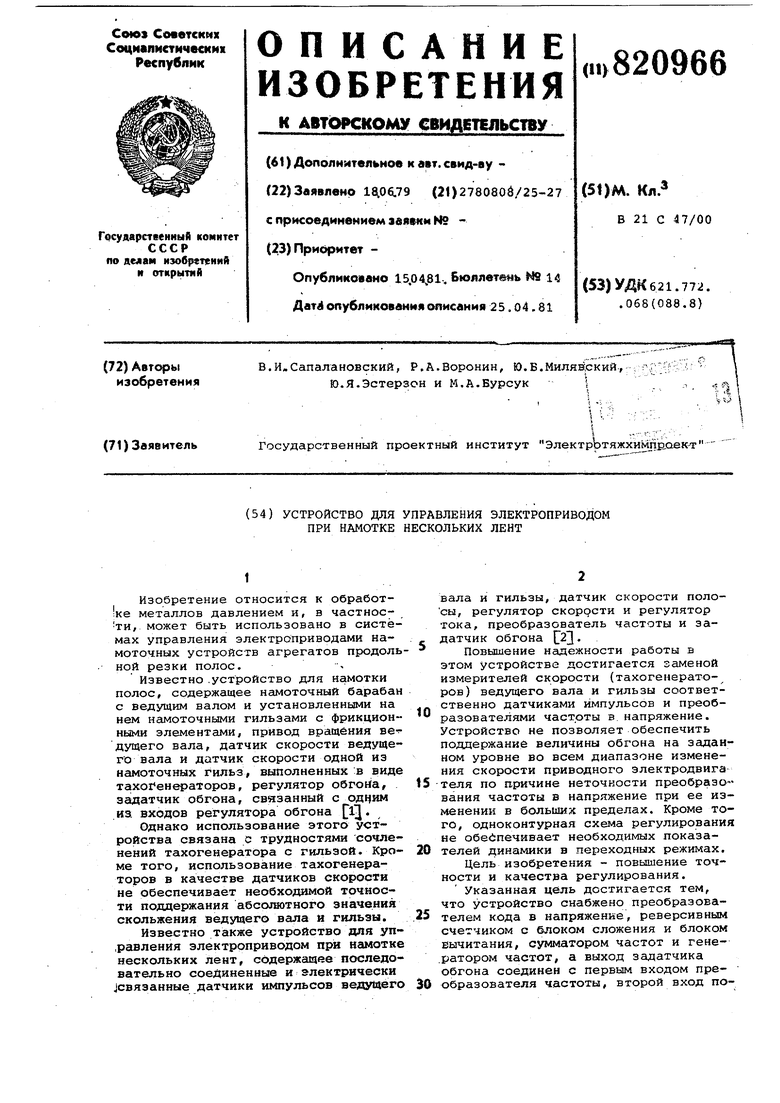
Преобразователь 13 частоты состоит из преобразователя 26 .десятичного .числа Пф задания частоты обгона в двоичное, регистра 17 ключей ввода и накапливающего сумматора 18.
Синхронизнруюкдай суктатор 12 содержит канал 19 формироваияя и задержки импульсов заданной частоты обгона f канала 20 формирования, и задержки импульсов частоты вргицеиия
гильз fj , и сумматор 21 си 1хрониэированных импульсов двух частот.
Предлагаемое устройство обеспечивает высокую точность регулирования величины обгона (практически статическая погреш.ность отсутствует) цифровой частью схемы, в которой информация оскоростях вращения ведущего вала и, гильзы поступает без ка4 ого-либо преббразованпя. Кроме того, реверсивный счетчик 9 представляет собой интегриру|(яаее звено {накопитель), сводшций разность частот на входе сложения и вычитания к нулю, т. е. исключает возможность :появления статической погрешности величины обгона. Улучшение качества регулирования в динамике обеспечено тем, что аналоговая схема регулирования скорости (блоки 2-6)., представленная в виде контура регулирования скорости, позволяет обеспечить необходимую устойчивость и быстродействие этой части схемы.
Цифровая часть схекцл (блоки 8-15 обеспечивает поддержание равенства
f4
2 о благодаря чему разность
частот поступающих импульсов и скоростей ведущего вала и гильзы остается постоянной и пропорциональной величине обгона ведущего вала и гильзы, т. е..
fo N - fz
где f.- - частота обгона, пропорциональная величине обгона ведущего вала и гильзы;
f частота импульсов импульсов ведущего вала;
f частота импульсов датчика импульсов гильзы. При стоянке агрегата, когда скорость полосы отсутствует ( 2 ) и при наличии уставки величины обгона (fo И 0) на вход блока сложения реверсивного счетчика 9 поступает частота fo , что приводит к вращению приводного электродвигателя 1.
При этом скорость вращения электродвигателя в установившемся режиме будет такой, при которой частота импульсов f, поступающих от датчика импульсов 10, будет f. fo а в реверсивном счетчике запишется число, пропорциональное скорости вращения электродвигателя 1. При любом отклонении равенства ff fQ число, записанное в реверсивном.счетчике 9, и соответственно сигнал коррекции скорости на выходе преобразователя 8 кода в напряжение изменяются, восстанавливая равенство. ;
При движения полосы на вход регу.пятора б скорости поступает сигнал задания скорости ot датчика 7 скорости полосы, гкльзы приходят в движение, и с выхода датчика 11 импульсов поступают импульсы с частотой fj В блоке 12 суммирования частот вырабатывается частот.а, равная fg + f Частота f + f сравнивается в реверсивном счетчике 9 с частотой f Если равенство f f не выполняется, то записанное в этом счетчике число увеличивается или уменьшается, вызывая соответствующее измене ние корректирующего сигнгша задания скорости и; тем самым, восстанавливает заданную величину обгона веду&се :го вала и гильзы. На фиг. 2 представ лен узел цифрового устройства формирования частоты задания обгона и суммирования частот обгона fg и вращения гильзы f2Преобразователь 16, на вход которого подается число пд от задатчнка 15 частоты .обгона в десятичном коде выдает его в двоичном коде поразрядно на входы регистра 17 ключей ввода. На каждый вход регистра ключей ввода подается эталонная частота от генератора 14 эталонной частоты. В зависимости от заданного числа по в двоичном коде регистр 17 Пропускает эталонную частоту на входы соответствующих разрядов накапливающего сумматора 18. , . Выходная частота накапливакяцего сумматора зависит от поступления эталонной частоты на входы соответствукяцих разрядов сумматора, т. е. от числа По , задаваемого на вход регистра 17 ключей ввода и определяется по формуле i . N где заданное число: N - емкость накапливающего сум матора; fg - эталонная частота. В сумматоре 12 импульсы частот Ig в каналах 19 и 20 формирования и задержки импульсов формируются определенной длительности. При совпадении.во времени импульсов, по ступающих на вход каналов 19 и 20, на выход кангша 20 п эрходит импульс частоты f2 , а импульс частоты f задерживается в канале 19 и поступает на выход только посла окончания заданной паузы между импульсами после выхода импульса f из канала 20. Таким образом, осуществляется разделение двух последовательностей импул сов во времени при их одновременном Поступлении. CyNOMiaTfig, 21 представлят собой схему ИЛИ, наг- выходе которой появляются импульсы обеих последовательностей. Предлагаемое устройство улучшает качество регулироваш(Я величины обгона ведуще1Го вала и гильзы в статике и , что позволяет повысить качество смотки полос на ги- 1ьзах и исключить аварийные ситуации, связанные с потерей обгона а процесce работы агрегата. Формула изобретения Устройство для управления электроприводом при. намотке нескольких лент, содержащее последовательно соединенные и электрически связанные датчики импульсов ведущего вала и гильзы, датчик скорости полосы, регулятор скорости и рег улятор тока, преобразователь частоты и задатчик обгона, отличающееся тем, что, с целью повышения точности и качества регулирования, оно снабжено преобразователем кода в напряжение, реверсивным счетчиком с блоком сложения и блоком вычитания, сумматоре частот и генератором частот, выход задатчика о&гона соединен с первым входом преобразователя частоты, второй вход последнего соединен с выходом генератора частоты, выход, преобразователя частоты соединен с первым входом сь 74матора частот, второй вход су№4атора частот соединен с выходом датчика импульсов гильзы, выход сумматора частот соединен со входом блока сложения реверсивного счетчика причем вход блока вычитания реверсивного счетчика соединен с выходом Датчика импульсов ведущего вала, а выход соединен со входом преобразователя кода в напряжение, выход которого соединен с первым входом регулятора скорости. Источники информации, принятые во вниелание пои экспеотизе 1. Патент Великобритании, ВЗЕ № 1447618. 1972. 2. Авторское свидетельство СССР по заявке I 2517406/25-27.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство управления летучими ножницами (его варианты) | 1983 |
|
SU1156871A1 |
| Устройство для намотки нескольких полос | 1977 |
|
SU993518A1 |
| Устройство для управления перемоткой длинномерного материала | 1985 |
|
SU1623934A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1985 |
|
SU1341138A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Устройство согласования скоростей проката и вращения барабана летучих ножниц | 1979 |
|
SU872066A1 |
| Устройство автоматического управления моталкой литейно-прокатного агрегата | 1983 |
|
SU1135514A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Цифровые системы управления | 1985 |
|
SU1247837A1 |
| Электропривод | 1987 |
|
SU1476584A1 |