1
Изобретение относится к вспомогательному оборудованию кузнечно-. прессовых цехов, а именно к конструциям манипуляторов.
Известен манипулятор, содержащий приводную подвижную тележку со смонтированной на ней поворотной колонной, на которой установлена с возможностью вертиксшьного перемещения обойма, в корпусе которой смонтирован хобот в виде шарнйрносоединенных между собой звеньев, захватное устройство, устанойленное на одной из крайних звеньев хобота, а также механизм горизонтального перемещения звеньев хобота IJ.
Недостатками известного мани пулятора являются невысокая точност позиционирования и его малая грузоподъемность , что является следствием выполнения хобота в виде роликовой цепи Ииспользования механизма горизонтального перемещения звеньев цепи, не обеспечивающего достаточную точность перемещения.
Цель изобретения - повышение точности позиционирования и грузоподъемности.
Эта цель достигается тем, что в манипуляторе, содержащем приводную
подвижную тележку со смонтированной на ней поворотной колонной, на которой установлена с возможностью вертикального перемещения обойма, в корпусе которой смонтирован хобот в виде шарнирно-соединенных между собой звеньев, захнатное устройство, уста- новленное на одном из крайних звеньев хобота, а также механизм горизонтального перемещения звеньев хобота, последний вьтолнен в виде смонтированного в корпусе обоймы приводного барабана, свободное крайнее звено хобота закреплено на барабане, при этом в корпусе обоймы концентрично боковой поверхности барабана выполнены направляющий паз и расточка, а на наружной поверхности каждого звена хобота выполнены выступы
и выемки по радиусу, равному радиусу расточки корпуса обоймы, с возможностью взаимодействия, соответственно, с направлякицим пазом и расточкой корпуса обоймы.
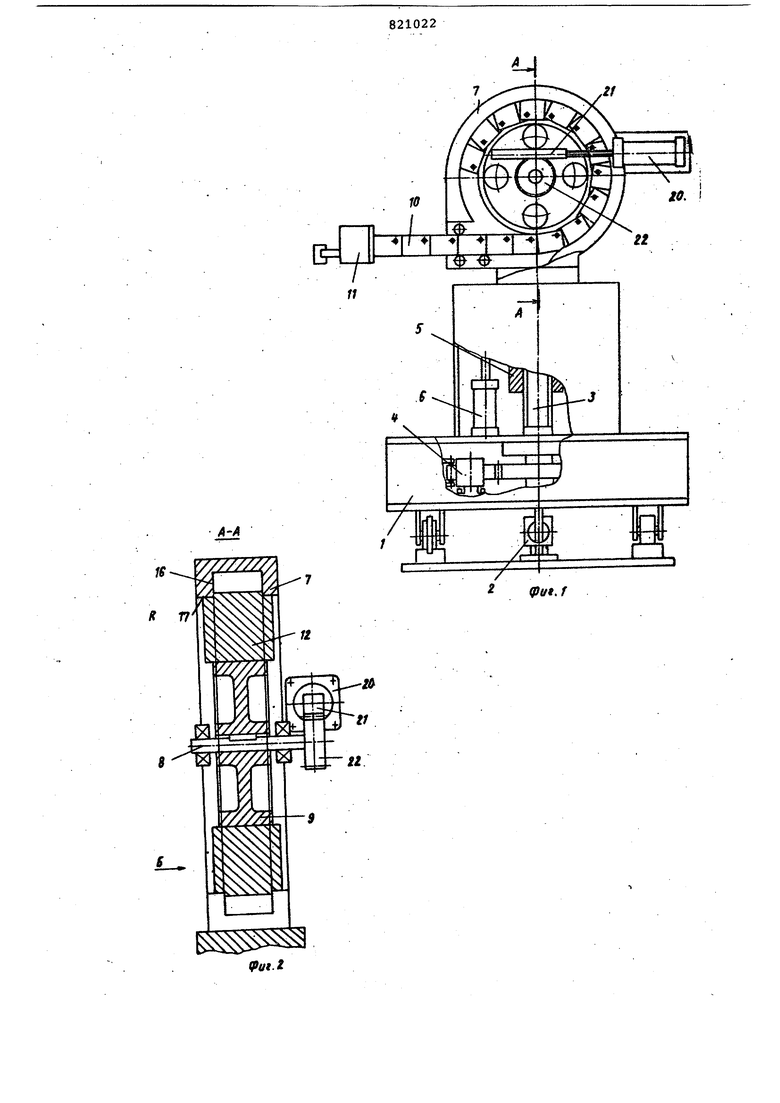
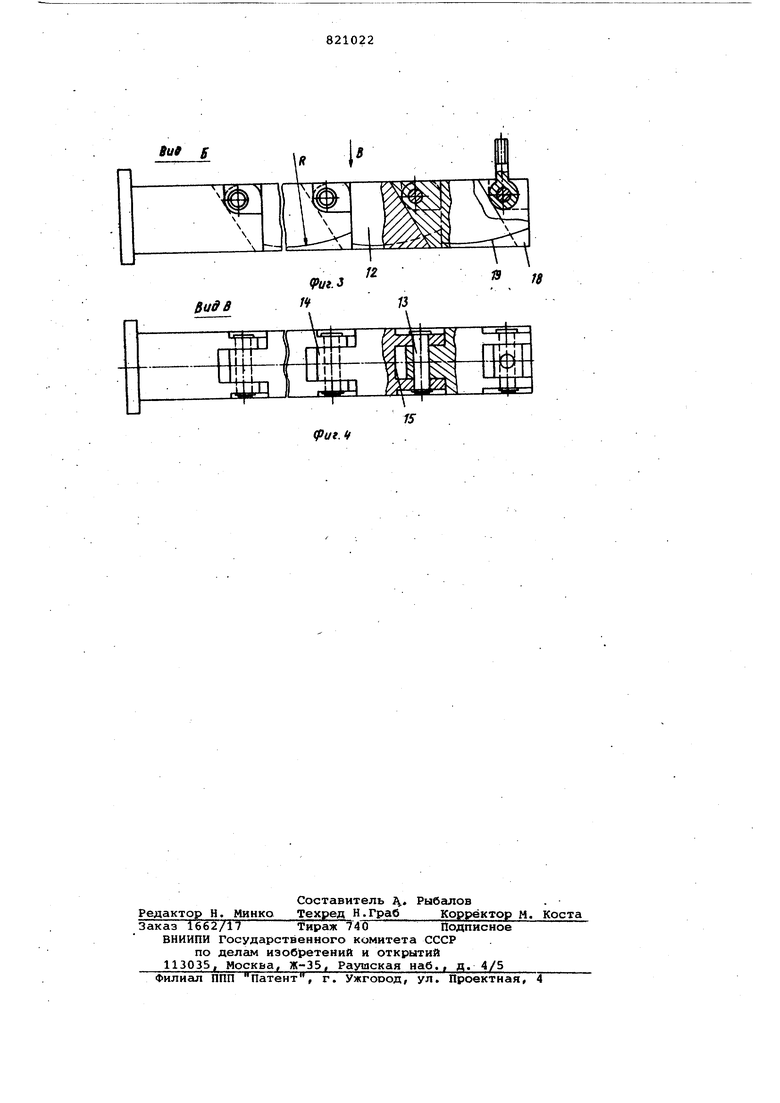
На фиг. 1 показан манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1} на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 3.
Манипулятор содержит тележку 1 с
приводом 2 ее перемещения,, на тележке смонтированы колонна 3 и привод ее вргиаения 4 вхжруг вертикальной оси колонны, на колонне 3 установле обойма 5 с приводом 6 ее вертикального перемещения, по колонне в корпусе 7 обоймы 5 на рои 8 смонтирован гладкий барабан 9. На барабане 9 жестко закреплен один конец хобот 10, а другой конец хобота соединен с saxBaTHtaui устройством 11. Хобот 10 состоит из сплошных зве Ньев 12,. соединенных между собой шарнирно посредством осей 13. На каждом звене выполнены выступ 14 и выемка 15, взаимодействующие, соответственно, с выемками и выступат ми соседних звеньев, обеспечивая гибкость хобота лишь в одном направлении. В корпусе 7 выполнены направляющий паз 16 и.расточка 17 а на наружной поверхности звеньев выполнены выступ 18, входящий в направляоощий паз 16, и выемки 19 по р /диусу, равным ргщиусу расточки 17 корпуса. Горизонтальное перемещение хобот осуществляется при повороте барабан 9. Привод вращения барабана состоит из пневмоцилиндра 20, смонтированно го на корпусе 7 обоймы 5. На штоке пневмоцилиндра 20 жестко закреплена рейка 21, находящаяся в зацеплении с шестерней 22-, установленной на той же оси 8, что и барабан 9. При повороте барабана звенья хобота либо наматываются на барабан и тог да вылет хобота уменьшается, либо звенья хобота сматываются с барабана, и тогда вылет хобота увеличивается. Манипулятор предлагаемой конструкции обладает высокой точностью позиционирования и грузоподъемностью. Формула изобретения Манипулятор, содержащий приводную подвижную тележку со смонтированной на ней поворотной колонной, на которой установлена с возможностью вертикального перемещения обойма, в корпусе которой смонтирован хобот в виде шарнирно-соединенных между собой звеньев, захватное устройство, установленное на одном из крайних звеньев хобота, а также механизм горизонтального перемещения звеньев хобота, отличающийся тем, что, с целью повышения точности позиционирования и повышения грузоподъемности, механизм горизонтального перемещения звеньев хобота выполнен в виде смонтированного в корпусе обоймы приводного барабана, свободное крайнее звено хобота закреплено на барабане, при этом в корпусе обоймы концентрично боковой поверхности барабана выполнены направляющий паз и расточка, а на наружной поверхности каждого звена хобота выполнены выступы и выемки по радиусу, равному радиусу расточки корпуса обоймы, с возможностью взаимодействия, соответственно, с направляющим пазом и расточкой корпуса обоймы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 524596, КЛ. В 21 J 13/10, 1975. (put, f
Вив g
IS 18
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU524596A1 |
| Манипулятор | 1979 |
|
SU804171A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| МЕХАНИЗМ УСТАНОВКИ И УДЕРЖАНИЯ КРЫШКИ КОНТЕЙНЕРА (ПЕНАЛА) С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ | 2011 |
|
RU2456691C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| УСТАНОВКА ДЛЯ СЪЕМА РУЛОНОВ С НАКОПИТЕЛЯ И ПЕРЕДАЧИ ИХ НА РАЗМАТЫВАТЕЛЬ | 2014 |
|
RU2567081C2 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |