(54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ | 1992 |
|
RU2042490C1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1975 |
|
SU524596A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Устройство для переноса заготовок | 1979 |
|
SU812411A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Механизм шагового перемещения | 1985 |
|
SU1263494A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
1
Изобретение .относится к вспомогательному оборудованию кузнечнопрессовых цехов, а именно к устройствам для манипулирования заготовками в процессе их обработки.
Известен манипулятор, содержащий приводную тележку, смонтированную на ней поворотную колонну, на которой установлена с возможностью вертикального перемещения обойма с захватным устройством и приводом его горизонтального перемещения, привод поворота колонны, выполненный в виде закрепленного на колонне зубчатого колеса и связанного с ним посредством зубчатой рейки основного силового цилиндраj привод вертикального перемещения обоймы в виде индивидуального силового цилиндра, связанного с обоймой посредством Промежуточного элемента, а также смонтированные на тележке упоры l .
В известном манипуляторе для прмежуточных остановов колонны, а следовательно, и хобота, требуется применение жестких приводных упоров, при убирании которых необходимо снимать с них нагрузку, т.е. требуется обратный холостой ход
силового цилиндра привода вращения колонны, что вызывает снижение про.изводительности. Кроме того, большие инерционные нагрузки на жесткие приводные упоры отрицательно сказываются на долговечность последних, что влечет за собой снижение точности позиционирования.
Цель изобретения - повышение на0дежности и точности позиционирования.
С этой целью в манипуляторе, содержащем приводную тележку, смонтированную на ней поворотную колон5ну, на которой установлена с возможностью вертикального перемещения обойма с захватным устройством и приводом его горизонтального перемещения, привод поворота колонны,
0 выполненный в виде закрепленного на колонне зубчатого колеса и связанного с ним посредством зубчатой рейки основного силового цилиндра, привод вертикального перемещения
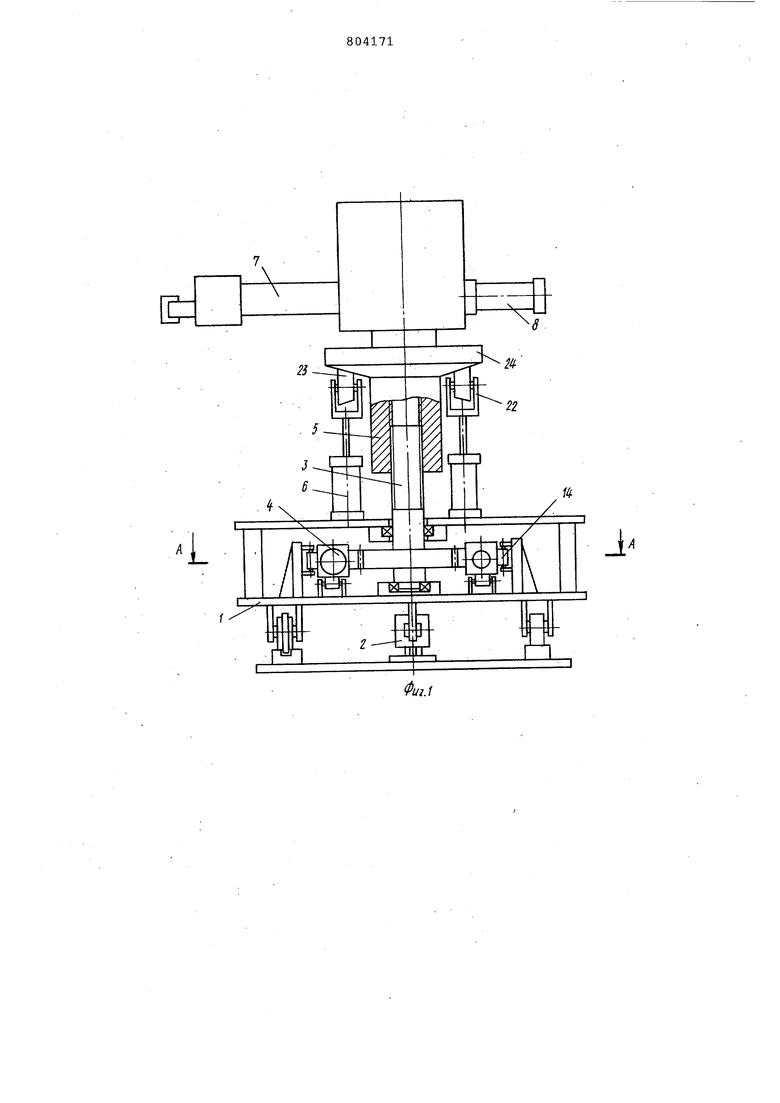
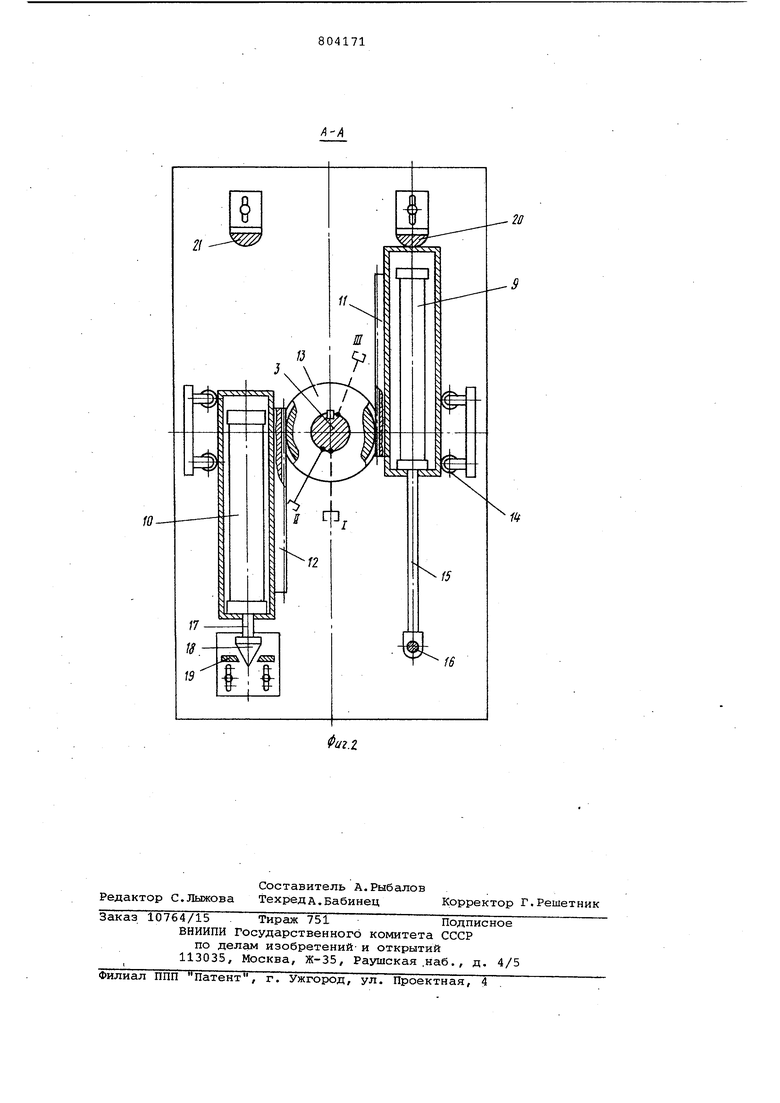
5 обоймы в виде индивидуального силового цилиндра, связанного с обоймой посредством промежуточного элемента, а также смонтированные на тележке упоры, привод поворота колонны снабжен дополнительным силовым цилиндром большего диаметра с индивидуальной зубчатой рейкой, взаимодействующей с указанным зубчатым колесом, зубчатые рейки установлены .на корпусах основного и дополнительного силовых цилиндров, а корпуса указанных силовых цилиндров размещены в роликовых направляющих при этом шток основного силового ци линдра шарнирно смонтирован на теле ке манипулятора, шток дополнительного силового цилиндра снабжен упор ной пятой, а тележка снабжена допол нительным упором, контактирущим с упорной пятой дополнительного силового цилиндра. Для упрощения демонтажа обоймы в манипуляторе привод вертикального перемещения обоймы снабжен дополнительными индивидуальными силовыми цилиндрами, промежуточный элемент привода выполнен в виде конических роликов по числу индивидуальных силовых цилиндров, а обойма выполнена с коническим буртом, взаимодействующим с указанными коническими роликами, при этом обойма связана с колонной посредством шлицевого соед нения. На фиг. 1 изображена конструкция манипулятора, общий вид; на фиг. 2 сечение А-А на фиг 1« Манипулятор содержит тележку 1 с приводом 2 ее перемещения, на тележке смонтирована колонна 3 и привод 4 ее вращения вокруг вертикальной оси колонны, на колонне 3 установлена обойма 5 с приводом б ее ве тикального перемещения по колонне, на обойме 5 расположено захватное устройство 7 с приводом 8 его гори зонтального Перемещения. Привод вращения колонны 3 состои из основного и дополнительного силовых цилиндров 9 и 10, на корпусах которых закреплены соответственно зубчатые рейки 11 и 12, находящиеся в зацеплении с зубчатым колесом 13, закрепленным на колонне 3. Корп;-са силовых цилиндров 9 и 10 установлены в роликовых направл ющих 14. Шток 15 основного силового цилиндра 9 закреплен на раме тележки 1 посредством пальца 16, а шток 17 дополнительного силового цилинд ра 10 снабжен упорной пятой 18, вз имодействующей с регулируемым упором 19,- установленным на раме тележки. На той же раме смонтированы упоры 20 и 21 для ограничения хода силовых цилиндров 9 и 10. Привод вертикального перемещени обоймы 5 выполнен в виде смонтированных на тележке 1 индивидуальных силовых цилиндров со штоками, несу щими вилки 22 с закрепленными в ни коническими роликами 23. На эти ро лики опирается обойма 5, для чего на последней выполнен бурт 24 с ко нической опорной поверхностью. Поворотная колонна,и обойма связаны между, собой посредством ишицевого соединения. Усилие дополнительного силового цилиндра 10 должно быть больше усилия основного силового цилиндра 9, поэтому диаметр силового цилиндра 10 больше диаметра силового цилиндра 9 . Конструкция манипулятора обеспечивает положение захватного устройства в любых трех, заранее заданных позициях без промежуточного упора. Силовой цилиндр 9 обеспечивает поворот колонны в секторе остановами в двух выбранных крайних позициях по жестким регулируе Фам упорам 20 и 21. Силовой цилиндр 10 обеспечивает положение колонны 3 в любой позиции, ограниченной вышеуказанными крайними .позициями, за счет установки регулируемого упора 19. У силового цилиндра 9 работают поршневая и штоковая полости,-а у силового цилиндра 10 работает только поршневая полость. Например, примем за две крайние позиции руки манипулятора позиции ) и I/ , а за промежуточную - позицию III . Чтобы рука манипулятора оказалась в позиции I , необходимо подать давление в штоковую полость силового цилиндра 9. Так как шток 15 жестко закреплен на раме тележки, то будет перемещаться корпус с закрепленной н нем рейкой 11. Через зубчатое кЬлесо 13 передается движение корпусу силового цилиндра 10. Перемещение силового цилиндра 10 осуществляется до упора 21, что соответствует положению I руки манипулятора. Чтобы рука манипулятора оказалась в позиции II , необходимо подать давление в поршневую полость силового цилиндра 9 при снятом давлении в силовом цилиндре 10. Происходит перемещение корпуса с рейкой 11 до упора 20, а через зубчатое колесо 13 осуществляется поворот колонны 3 и перемещение рейки 12. Чтобы рука манипуляторс1 оказалась в позиции /II , необходимо подать давление в поршневые полости силовых цилиндров 10 и 9. В таком случае силовой цилиндр 9 через зубчатую рейку 11 стремится повернуть зубчатое колесо 13 против часовой стрелки, а силовой цилиндр 10 через зубчатую райку 12 стремится повернуть зубчатое колесо 13 по часовой стрелке. Причем при подаче давления в поршневую полость силового цилиндра 10 сначала шток 17 с пятой 18 перемещается до упора 19, а потом уже начинается перемещение корпуса с рейкой 12, поворачивая
колесо 13 по часовой стрелке. Так как усилие силового цилиндра 10 больше усилия силового цилиндра 9, то поворот колеса осуществляется в результате по часовой стрелке. При этом шток силового цилиндра 10 совершает свой полный ход, а силовой цилиндр 9 совершает свой максимально допустимый ход, зависящий от положения упора 19.
Манипулятор предложенной конструкции обладает повышенной надежностью и точностью позиционирования.
Формула изобретения
0 цилиндра шарнирно смонтирован на тележке манипулятора, шток дополнительного силового цилиндра снабжен упорной пятой, а тележка снабжена дополнительным упором, кон5тактирующим с упорной пятой дополнительного силового цилиндра.
0 снабжен дополнительными индивидугшьными силовыми цилиндрами, промежуточный -элемент привода выполнен в виде конических роликов по числу индивидуальных силовых дилиндров, а
5 обойма выполнена с коническим буртом, взаимодействующим с указанными коническими роликами, при этом обойма связана с колонной посредством шлицевого соединения.
0
Источники информации, принятые во внимание при экспертизе
Т
E:
2i
22
J ff.
. l
n
/
О
ME За
:Ар
LL
20
