1
Изобретение относится к области обработки металлов давлением, в частности к манипуляторам для кривошипных горячештамповочяых прессов.
Известен манипулятор, содержащий привод ную тележку со смонтированной на ней поворотной колонной, на которой установлена с возможностью вертикального перемещения обойма со смонтированными на ней посредством кронштейна хоботом с захватным устройством и приводом его горизонтального перемещения.
Цель изобретения - повышение производительности и уменьшения инерционных нагрузок манипулятора.
Для этого в предлагаемом манипуляторе хобот выполнен в виде приводной роликовой цепи, на одном конце которой смонтировано захватное устройство, а другой конец цепи свободно размещен в вертикальных направляющих, установленных в обойме, при этом каждое звено цепи со стороны обоймы выполнено с выступом и впадиной, взаимодействующими соответственно с впадиной и выступом соседних звеньев; кроме того, з- патное устройство выполнено в виде смонтированных на кронштейне двух пар параллельно установленных между собой захватов, кинематически взаимосвязанных посредством шестерни, установленной на кронигтейне, и зубчатых реек, жестко соединенных с каждой парой и размещенных в направляющих, предусмотренных на кронштейне, при этом одна из пар захватов снабжена приводом возвратно-поступательного перемещения, выполненным в виде силового цилиндра, смонтированного на кронштейне.
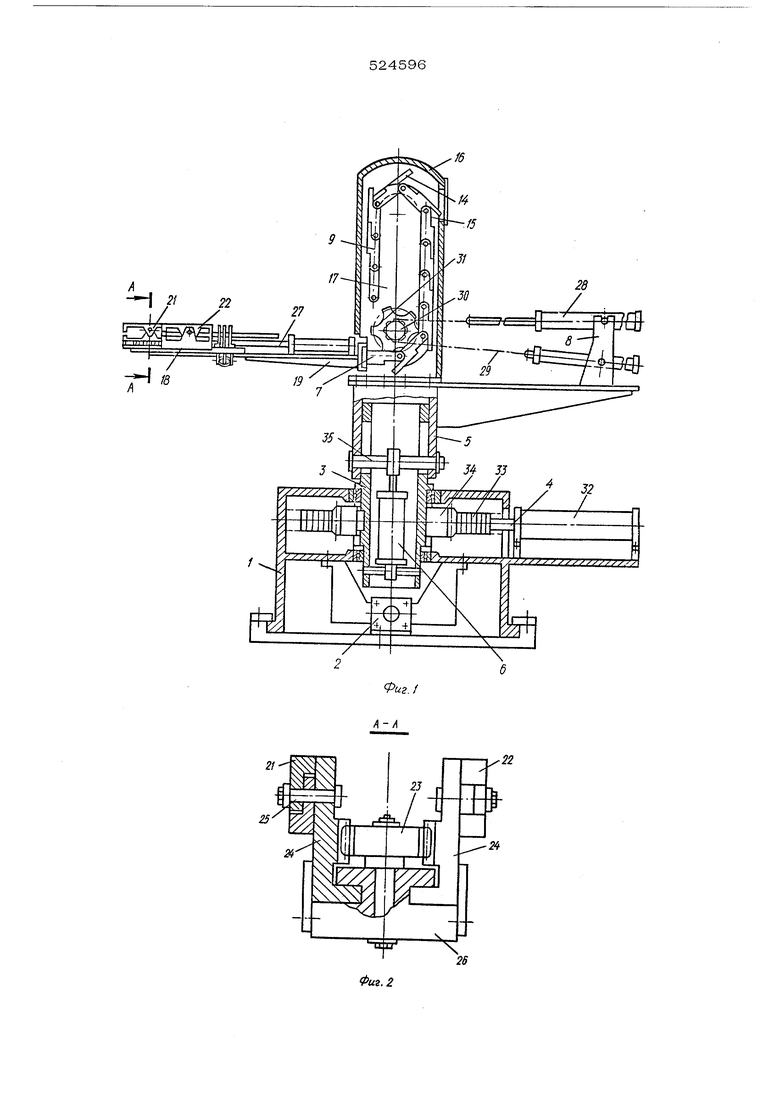
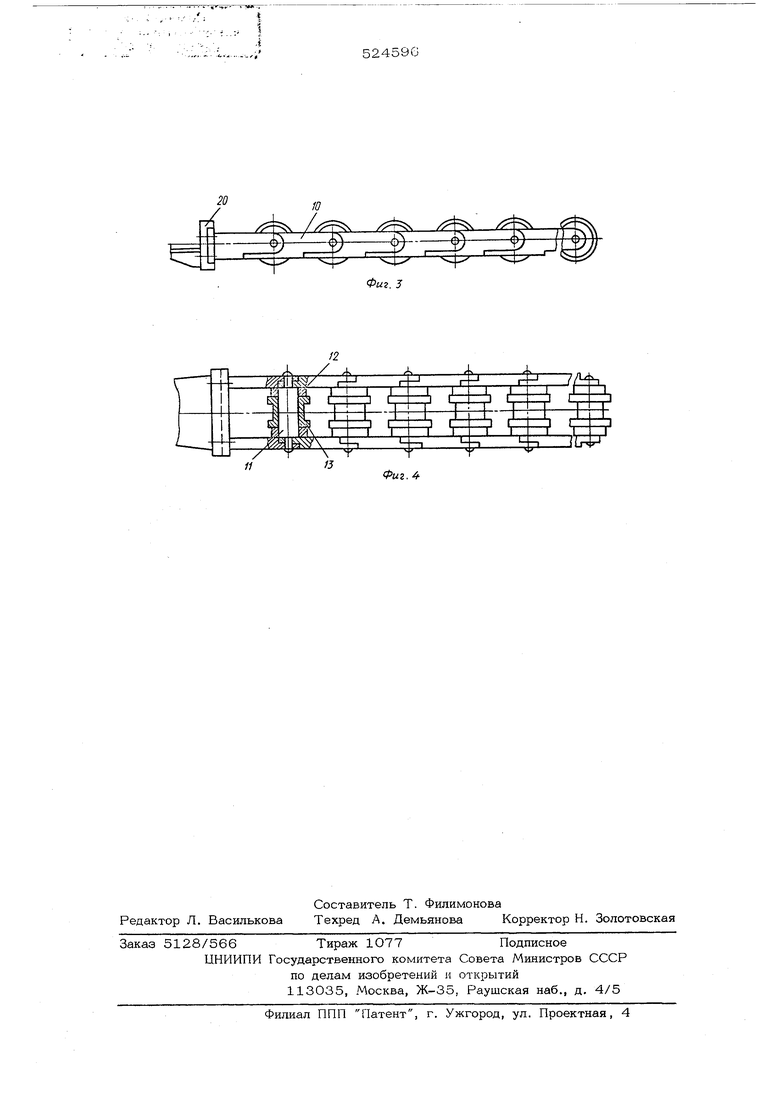
На фиг. 1 показан предлагаемый манипулятор, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3,4 - конструкция цепи хобота.
Манипулятор содержит тележку 1 с приводом 2 ее перемещения, на тележке смонтирована колонна 3 и привод 4 ее вращения вокруг вертикальной оси колонны, на колонне 3 установлена обойма 5 с приводом 6 ее вертикального перемещения по колонн( на обойме 5 раслолол ен хобот 7 с ппивсдом 8 его горизонтального пепем -11е -:- ;.
Хобот 7 выполнен в виде приводной цепи 9, состоящей из звеньев 10, соединенных между собой осью 11, на которой установлены ролики 12 и центральный каток 13. На кахшом звене 1О цепи выполнены выступ 14 и впадина 15, взаимодействующая соответственно с впадиной и выступом соседних звеньев. Такая конструкция звеньев обеспечивает гибкость цепи только лишь в одном направлении и жесткость ее в горизонтальном положении. Хобот получается не сплошным массивным телом, а легкой конструкцией при равной прочности.
Предусмотренная возможность поворота звеньев цепи одного относительно другого в одном лишь направлении позволяет при отводе хобота назад убирать свободный конец цепи в кассету 16 по вертикальнымнаправляющим 17, с которыми взаимодействуют центральные катки 13 цели, тем самым уменьшая вылет хобота и, как следствие, момент инерции. К другому концу цепи (хоботу) прикреплено быстросменное захватное устройство 18, смонтированное на кронштейне 19, имеющем фланец 2О, соответствующий фланцу хобота, для их соединения.
Быстросменность захватов достигается в результате того, что захватное устройство .выполнено в виде двух параллельных захватов 21 и 22, кинематически связанных между собой посредством шестерни 23, укрепленной на кронщтейне 19, и зубчатых реек 24, закрепленных на осях 25 захватов и установленных в предусмотренных на кронщтейне направляющих 26,
Один из захватов 21 соединен со штоком пневмоцилиндра 27. Смена захватов осуществляется автоматически: включается пневмоцилиндр (захват), соединенный со штоком, отводится назад, а на его место выдвигается другой захват, связанный с первым посредством реек и шестерни.
Привод 8 горизонтального перемещения хобота выполнен в виде пневмоцилиндров 28 штоки которых связаны с концами обычной втулочно-роликовой цепи 29, приводящей во вращение звездочку ЗО. Звездочка ЗО закреплена на одной ООН со сдвоенной звездочкой 31, которая находится в зацеплении с роликами 12 цепи 9.
Привод 4 вращения колонны состоит из пневмоцилиндра 32, на штоке которого закреплена зубчатая рейка 33, находящаяся в зацеплении с зубчатым колесом 34, смонтированным на колонне. Нижний конец колонны установлен на подшипниках качения. Привод 6 вертикального перемещения обоймы по колонне 3 выполнен в виде размещенного внутри колонны пневмоцилиндра, шток которого посредством пальца 35 связан с обоймой 5.
Формула изобретения
1.Манипулятор, содержащий приводную тележку со смонтированной на ней поворотной колонной, на которой установлена с возможностью вертикального перемещения обойма со смонтированными на ней посредством кронштейна хоботом с захватным устройством и приводом его горизонтального перемещения, отличающийся тем, что,
с целью повышения производительности и уменьшения инерционных нагрузок, хобот выполнен в виде приводной роликовой цепи, на одном конце которой смонтировано захватное устройство, а другой конец цепи свободно размещен в вертикальных направляющих, установленных в обойме, при этом каждое звено цепи со стороны обоймы вьшолнено с выступом и впадиной, взаимодействующими соответственно с впадиной и выступом сосед- них звеньев,
2,Манипулятор по п. 1, отличающийся тем, что захватное устройство выполнено в ввде смонтированных на кронщтейне двух пар параллельно установленных между собой захватов, кинематически взаимосвязанных посредством шестерни, установленной на кронштейне, и зубчатых реек, жестко соединенных с каждой парой и размещенных
в направляющих, выполненных на кронштейне, при этом одна из пар захватов снабжена приводом возвратно-поступательного перемещения, выполненным в виде силового цилиндра, смонтированного на кронштейне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU821022A1 |
| Манипулятор | 1979 |
|
SU804171A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| Напольная посадочная машина | 1971 |
|
SU473557A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
| Устройство для перемещения заготовок в процессе ковки | 1971 |
|
SU473556A1 |
Фиг. 4
