(54) КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| в ПТБФОеД eHGIEF'i | 1973 |
|
SU408702A1 |
| Ковочный безрельсовый манипуля-TOP | 1978 |
|
SU795707A1 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| Фрезерная головка | 1987 |
|
SU1512712A2 |
| Ковочный манипулятор | 1983 |
|
SU1171172A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов машиностроительных предприятий, а именно, к конструкциям ковочных манипуляторов.
Известен ковочный манипулятор, содержаший тележку, установленную на ней посредством приводного рычажного механизма раму, хобот с захватом, размещенный в обойме, связанной с рамой посредством оси с камнем, а также механизмы осевого перемещения рамы и поперечного перемещения обоймы 1 .
Недостатком известного ковочного манипулятора является невысокая его производительность работы вследствие совместного перемещения рамы и обоймы, обладающих больщой массой.
Цель, изобретения - повышение производительности работы ковочного манипулятора.
Эта цель достигается тем, что ковочный манипулятор, содержащий тележку, установленную на ней посредством приводного рычажного механизма раму, хобот с захватом, размещенный в обойме, связанной с рамой
посредством пальца с камнем, а тйкже механизмы осевого перемещения рамы и поперечного перемещения обоймы, снабжен смонтированными на раме параллельно продольной оси хобота направляющими и установленным в них с возможностью перемещения ползуном, выполненным с поперечным пазом и снабженным механизмом перемещения, при этом камень, размещенный на пальце обоймы, установлен в поперечном
10 пазу ползуна, а механизм перемещения ползуна по направляющим выполнен в виде ползушек, установленных в вертикальных направляющих, выполненных на тележке и связанных тягами с рычагами рамы, поперечного вала,-смонтированных в указанных
ползушках, и силового цилиндра, корпус которого щарнирно связан с поперечным валом, а шток - с ползуном.
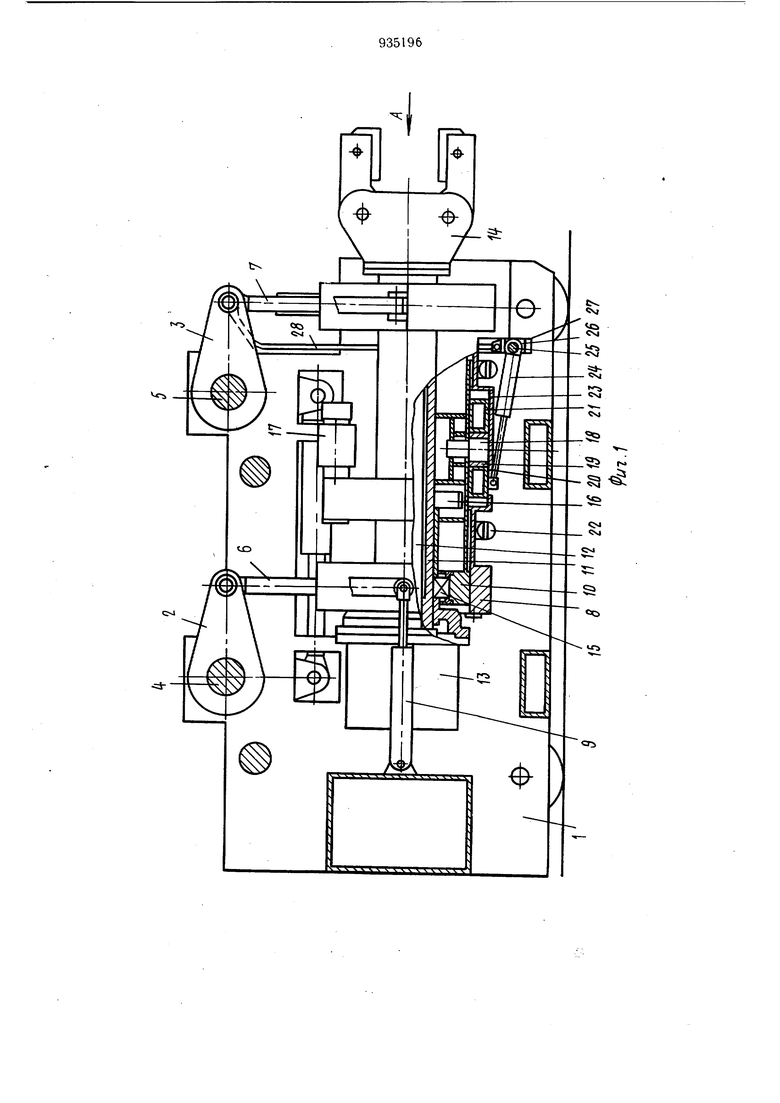
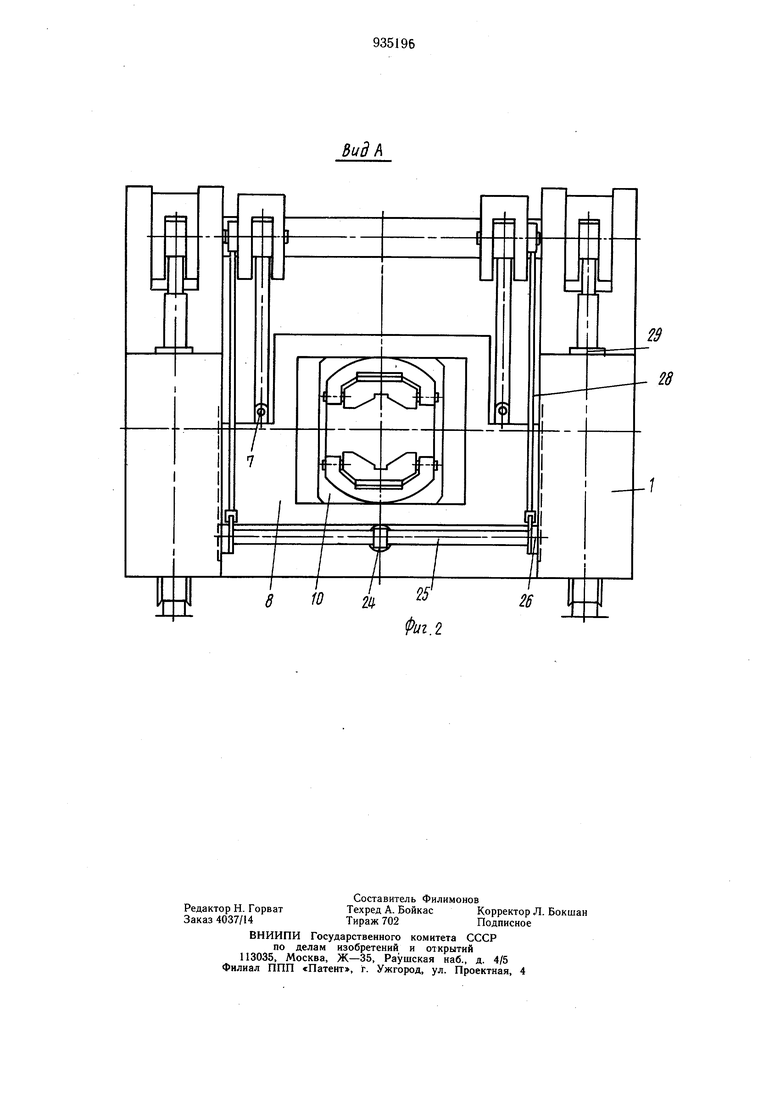
На фиг. 1 изображен ковочный мэнипулятор, общий вид, разрез; на фиг. 2 -
20 вид А на фиг. 1.
На тележке 1 ковочного манипулятора на рычагах 2 и 3, жестко закрепленных на валах 4 и 5, и тягах 6 и 7 подвешена рама 8, связанная шарнирно со штоком
цилиндров 9 осевого перемещения относительно тележки. Внутри рамы 8 расположена обойма 10, имеющая возможность осевого и поперечного смещения относительно рамы и связанная с хоботом, состоящим из мундштука 11, щтока 12, цилиндра зажима 13 и клещей 14. Мундщтук посредством подшипников 15 закреплен в раме 10 и приводится во вращение с помощью зубчатого редуктора 16 и приводного гидромотора 17, укрепленного на обойме 10. Обойма 10 с помощью жестко закрепленного в ней пальца 18 шарнирно связана с камнем 19, который имеет возможность перемещения в поперечном пазу 20 ползуна 21 с помощью поперечных цилиндров 22, щарнирно связанных с тележкой 1. Ползун 21 расположен в направляющих 23 рамы и имеет возможность осевого перемещения вдоль оси манипулятора с помощью шарнирно связанного с ним силового цилиндра 24 поршневого типа. Корпус цилиндра 24 связан шарнирно с поперечным валом 25, на концах которого жестко укреплены ползушки 26, находящиеся в вертикальных направляющих 27 тележки 1 и предназначенные для восприятия осевых усилий силового цилиндра 24 при перемещении обоймы 10 относительно рамы 8. Для синхронного движения силового цилиндра 24 вместе с хоботом ползущки 26 тягами 28 связаны с концами рычагов 3, подъем которых осуществляется от цилиндров подъема 29 посредством рычагов, жестко насаженных на вал 5.
Ковочный манипулятор работает следующим образом.
Для быстрого осевого перемещения обоймы 10 вместе с хоботом и поковкой относительно рамы 8 в силовой цилиндр 24 подается жидкость высокого давления. Одновременно срабатывает и цилиндр 9 осевого перемещения рамы относительно тележки 1 манипулятора. Обойма 10 смещается относительно рамы 8 цилиндром 24 С помощью ползуна 21, который поверхностями поперечного паза 20 перемещает камень 19, насаженный на палец 18, жестко связанный с обоймой 10. Положение силового цилиндра 24 относительно рамы не меняется при ее различных положениях по высоте относительно тележки манипулятора, так как при ее подъеме или опускании тяги 28 поднимаются или опускаются ползушки 26, которые перемещают поперечный вал 25, связанный с силовым цилиндром 24.
При поперечном смещении обоймы 10
относительно рамы 8 с помощью поперечных цилиндров 22 камень 19, связанный через палец 18 с обоймой, перемещается в поперечном пазу 20 ползуна 21, который фиксируется в направляющих 23 рамы с
помощью силового цилиндра 24. Соединение обоймы 10 с рамой 8 в виде камня 19 и пальца 18 позволяет осуществлять с помощью поперечных цилиндров 22 пере.мещение обоймы внутри рамы относительно вертикальной оси манипулятора.
Использование данного изобретения позволяет повысить производительность работы ковочного манипулятора.
Формула изобретения
Ковочный манипулятор, содержащий тележку, установленную на ней посредством приводного рычажного механизма раму, хобот с захватом, размещенный в обойме,
связанной с рамой посредством пальца с камнем, а также механизмы осевого перемещения рамы и поперечного перемещения обоймы, отличающийся тем, что, с целью повышения производительности работы, он снабжен смонтированными на раме параллельно продольной оси хобота направляющими и установленным в них с возможностью перемещения ползуном, выполненным с поперечным пазом и снабженным механизмом перемещения, при этом камень,
размещенный на пальце обоймы,- установлен в поперечном пазу ползуна, а механизм перемещения ползуна по направляющим выполнен в виде ползушек, установленных в вертикальных направляющих, выполненных на тележке, и связанных тягами с рычагами рамы, поперечного вала, смонтированного в указанных ползушках, и силового цилиндра, корпус которого шарнирно связан с поперечным валом, а шток - с ползуном.
Источники информации,
принятые во внимание при экспертизе 1. Патент Великобритании № 1186391 кл. В 3 Н, 1968 (прототуп).
Вид/
