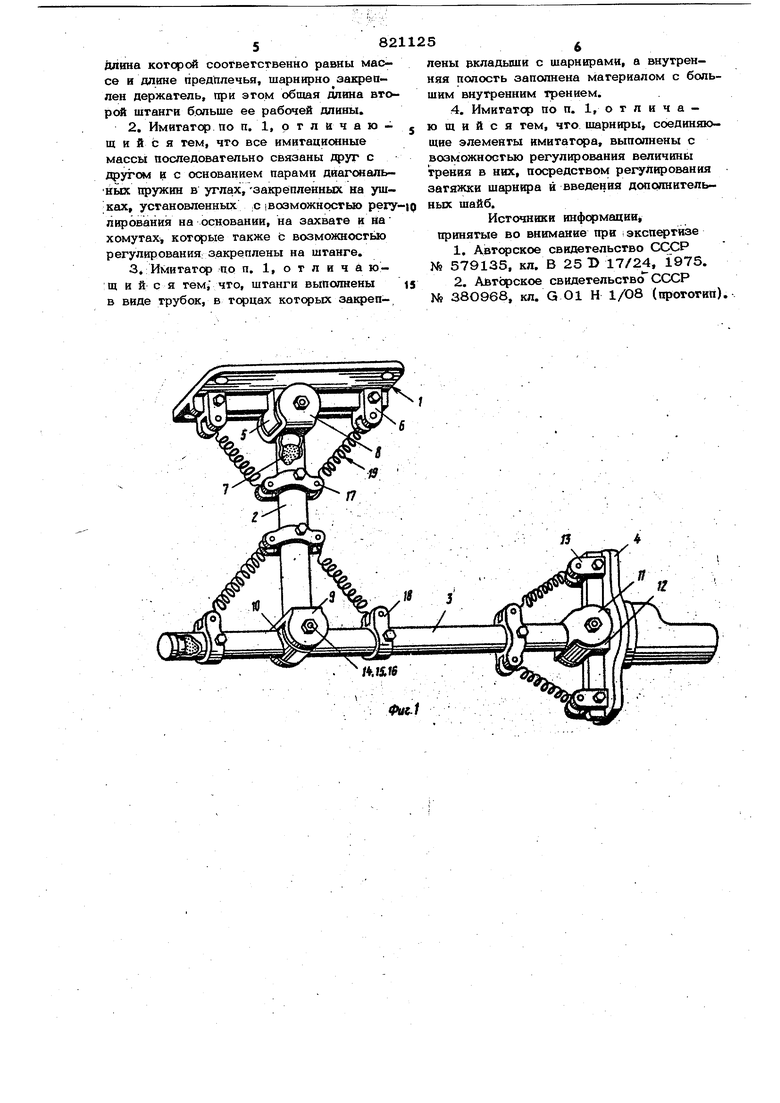
3.8 полость .заполнена материалом с большим внутренним трением. Шарниры, соедин$пощие элементы имитатора, выполнены с возможностью регулирования величины трения в них посредством регулирования затяжки шарнира и введения дополнительных шайб. На фиг. 1 дан имитатср, общий вид: на фиг. 2 - регулирование углов между элементами имитатора, схема. Антропометрический имитатор руки опеоатоса. содержит основание 1, имитатор 2 ппеча, имитатор 3 предплечья, выполненные в виде штанг, и захват 4. Основание 1 ргредставляет собой кронштейн, с помощью которого весь имитатор крепится, на , пример, на стенде для испытания ручных машин с целью определения их вибрациейных характеристик. На основании, закреплена серьга шарнира 5 и два ушка 6, ИмИ таторы 2 и 3 плеча и предплечья соответ ственно представляют собой штанги, выполненные из прочных тонкостенных трубо изготовленных, например из дюралюминия. Чтобы избежать возбуждения в штангах собственных низкочастотных колебаний за счет продольных деформаций, трубки запол HjnoT материалом с большим внутренним трением, чапример антивибрационной пасто или. песком 7. В торцах закреплены заглушки, причем с одной стороны штанги 2 закреплена заглушка с серьгой 8 шарнира 5, а с другой - заглушка с серьгой 9 шарнира Ю. В штанге 3 заглушка с серь гой 11 шарнира 12 установлена со стороны захвата 4, с противоположной стороны установлена свободная заглушка. Длина штанги 2, имитирующей плечо руки, равна средней длине плеча человека. Масса штанги 2 равна средней массе плеча человека. Имитатор 3 предплечья, помимо длины от шарнира 9 до шарнира 12, равной средней длине предплечья человека, имеет хвостовик с другой стороны.шарнира 10, Захват 4, служащий для установки в нем рукоятки ручной машины, выполнен из упругого материала, например резины, и имеет серьгу ша:рнира 12 и два ушка 13. Все элементы имитатора соединены шарнирами 5, 10 и 12. Для обеспечения необходимой устойчивости в попереч ном натфавлении, серьги шарниров выполнены с большим диаметром. Между серьга . ми размещаются вкладные шайбы, когорые в зависимости от необходимости обеспечения заданной силы трения в шарнире могут быть выполнены, HatipHMep, из фторопласта, когда необходим.о малое трение. 2S4 или из резины, когда требуются значительные потери в шарнирах. Величина трения в шарнире -варьируется за счет степени поджатия, обеспечиваемого с .помощью винта 14 и двух гаек 15 и 16 - регулирующей и контрящей , На штанге 2 установлены два хомута 17, на каждом из которых по два ушка. На штанге 3 между шарнирами 10 и 12 установлен один такой хомут,. Кроме того, на штанге 3 установлены Два хомута 18 с одним ушком, один из которых расположен между шарнирами 1О и 12, а другой -,на хвостовике. За ушки хомутов 17 и 18, установленных на штангах, и ушки 6 и 13, установленные соответственно на основании 1 и захвате 4, все элементы имитатора соединены иго углам диагональными пружинами 19 растяжения, величина натяже ния которых определяется величиной статической силы имитатора руки на ручную машину. Имитатор работает следующим образом. Изменением положения хомутов 18 и ушек 6 и 13 обеспечивается установка любых углов между элементами имитатора, чем имитируется любое рабочее положение и соответствующие ему динамические характеристики на входе имитатора руки. Изменение положения хомутов 17 : обеспечивает регулировку силы растяжения пружины, зависящую от статической силы нажатия имитатора руки на ручную, машину. Выполнение имитатора в соответствии с формулой изобретения обеспечиваем получение динамических характеристик руки практически для любых соотношений углов между элементами руки. Формула изобретения 1. Антропометрический имитатор руки оператора при испытаниях ручных машин . на вибрацию, содержащий основание, имитационные массы, держатели, выполненные из упругого материала, и пружины, отичающийся тем, что, с целью воспроизведения динамических характеристик руки для любого рабочего положения, имитадишные массы выполнены в виде вух шарнирно соединенных друг с другом танг, одна изкоторых, имитирующая плечо и равная ему по длине и массе, арнирно закреплена на основании, а на онце другой штанги, масса и рабочая 582 длина которой соогвегсгвенно равны массе и длине предплечья, шарнирно ааЕреп лен держатель, при этом общая длина второй штанги б.опьше ее рабочей длины. 2, Имитатор по п. 1, о т л и ч а ю щ и и с я тем, что все имитационные массы последовательно связаны друг с рругсм и с основанием парами диагональных пружин в углах, -аакре-пленных на уш 7. :С 1 возможностью регулирования на основании, на захвате и на хомутах, которые также с возможностью регулирования закреплены на штанге. 3 Имитатор по п. 1, о т л и ч а юш и и с я тем, что, штанги выполнены в виде трубок, в торцах котсрых закреп5лены вкладыши с шарнирами, а внутренняя полость заполнена материалом с большим внутренним трением. 4. Имитатор по п. 1, о т л и ч а ю щ и и с я тем, что шарниры, соединяющие элементы имитатфа, выполнены с возможностью регулирования величины трения в них, посредством регулирования затяжки шарнира и введения дополнительных шайб, Источники информации принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 579135, кл. В 25 D 17/24, 1975. 2. Аьтфское свидетельство СССР № 38О968, кл. G О1 Н 1/О8 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU700786A2 |
| Палка адаптационная комбинируемая интеграционная (варианты) | 2023 |
|
RU2832663C1 |
| Нательное крепление для оружия | 2023 |
|
RU2832665C1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПНЕВМАТИЧЕСКИХ УДАРНЫХ ИНСТРУМЕНТОВ | 1991 |
|
RU2051022C1 |
| Подручная опора адаптационная | 2023 |
|
RU2810342C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУКИ | 2019 |
|
RU2720744C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БОРЦОВ | 1998 |
|
RU2140312C1 |
| Опора для человека | 2022 |
|
RU2799671C1 |

