Изобретение относите к конвейеростроению, а именно к тележечным конвейерам, и может быть применено на конвейерных линиях для транспортирования крупногабаритных изделий с точными остановами по заданной программе.
Известен тележечный конвейер, содержащий опорную конструкцию с перемещаемыми по ней тележками, соединенными с тяговым органом сцепным устройством, и имеющий механизмы точного останова 1.
Известен также тележечный конвейер, содержащий раму с направляющими, в которых смонтированы снабженные упорами тележки, соединенные с тяговым органом, установленные на раме привод поворота упоров и остановы тележек и подпружиненные фиксаторы рабочего и нерабочего положений упоров 2.
Этот конвейер может быть использован в автоматизированных линиях, где требуются точные остановы его, при этом на раме смонтировагю такое количество выдвижных фиксаторов, которое соответствует количеству остановов, что усложняет конструкцию конвейера. Получение малого расстояния между остановами (менее 50-60 мм), например, при контактной точечной сварке мета.длоконструкции невозможно, так как это лимитируется конструкцией упора, установленного на тележке, что снижает те.хнологические возможности конвейера. Цель изобретения - обеспечение точного останове тележки при малом шаге ее перемещений.
Для достижения указанной цели в тележечно1М конвейере, содержащем раму с направляющими, в которых смонтированы
снабженные упорами тележки, соединенные с тяговым органом, установленные на раме привод поворота упоров и остановы тележек и подпружиненные фиксаторы рабочего и нерабочего положений упоров, последние выполнены в виде группы пластин, установленных на параллельной направляющим оси на расстоянии друг от друга, равном перемещений тележки, причем над каждой пластиной установлен фиксатор; кро.ме того, каждая пластина выполнена со скосом, взаимодействующим с наклонной поверхностью выступа фиксатора.
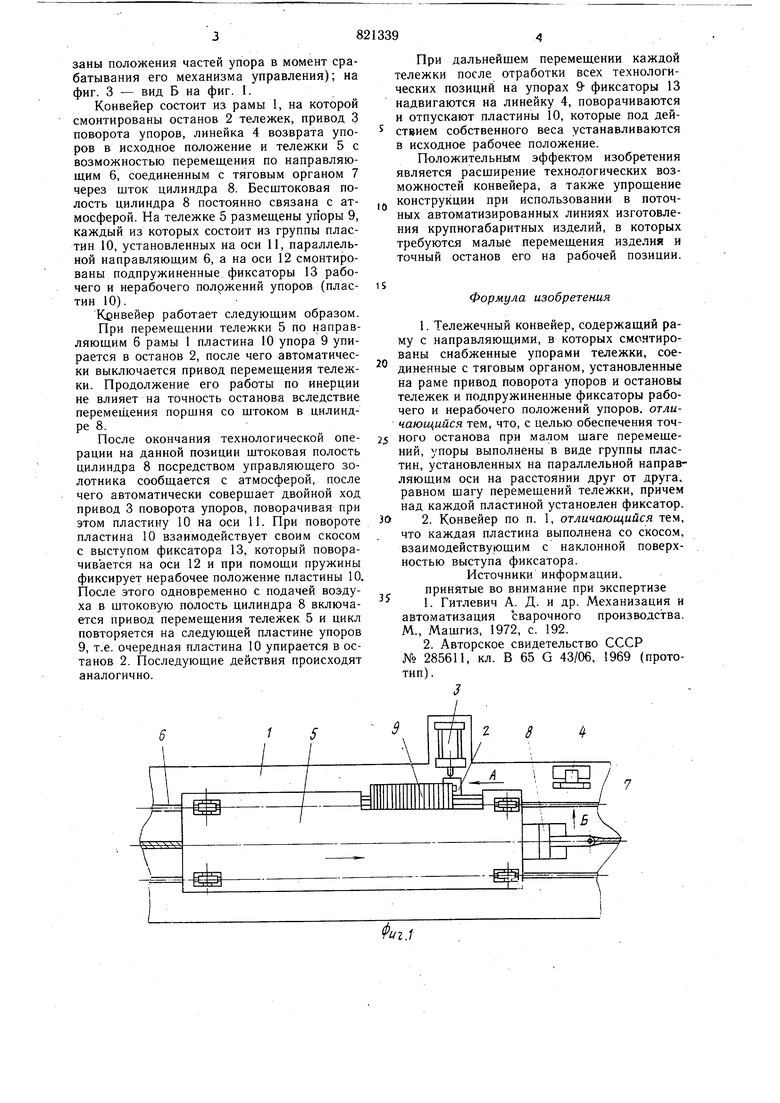
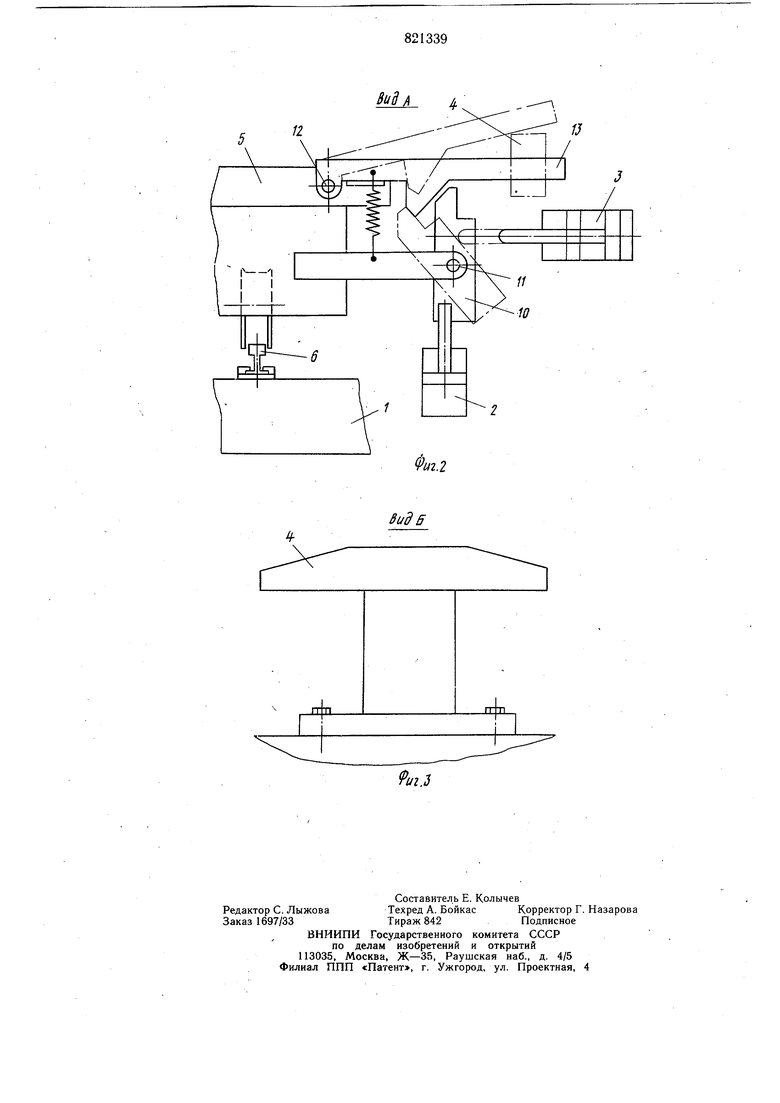
На фиг. 1 изображена одна из тележек конвейера, общий вид; на фиг. 2 - вид А на фиг. 1 (штрихпунктирной линией показаны положения частей упора в момент срабатывания его механизма управления); на фиг. 3 - вид Б на фиг. 1.
Конвейер состоит из рамы 1, на которой смонтированы останов 2 тележек, привод 3 поворота упоров, линейка 4 возврата упоров в исходное положение и тележки 5 с возможностью перемещения по направляющим 6, соединенным с тяговым органом 7 через шток цилиндра 8. Бесщтоковая полость цилиндра 8 постоянно связана с атмосферой. На тележке 5 размещены упоры 9, каждый из которых состоит из группы пластин 10, установленных на оси 11, параллельной направляющим 6, а на оси 12 смонтированы подпружиненные фиксаторы 13 рабочего и нерабочего положений упоров (пластин 10).
Кснвейер работает следующим образом.
При перемещении тележки 5 по направляющим 6 рамы 1 пластина 10 упора 9 упирается в останов 2, после чего автоматически выключается привод перемещения тележки. Продолжение его работы по инерции не влияет на точность останова вследствие перемеш.ения порщня со щтоком в цилиндре 8.
После окончания технологической операции на данной позиции щтоковая полость цилиндра 8 посредством управляющего золотника сообщается с атмосферой, после чего автоматически соверщает двойной ход привод 3 поворота упоров, поворачивая при этом пластину 10 на оси 11. При повороте пластина 10 взаимодействует своим скосом с выступом фиксатора 13, который поворачивается на оси 12 и при помощи пружины фиксирует нерабочее положение пластины 10. После этого одновременно с подачей воздуха в штоковую полость цилиндра 8 включается привод перемещения тележек 5 и цикл повторяется на следующей пластине упоров 9, т.е. очередная пластина 10 упирается в останов 2. Последующие действия происходят аналогично.
При дальнейщем перемещении каждой тележки после отработки всех технологических позиций на упорах 9- фиксаторы 13 надвигаются на линейку 4, поворачиваются и отпускают пластины 10, которые под действием собственного веса устанавливаются в исходное рабочее положение.
Положительным эффектом изобретения является расщирение технологических возможностей конвейера, а также упрощение конструкции при использовании в поточных автоматизированных линиях изготовления крупногабаритных изделий, в которых требуются малые перемещения изделия и точный останов его на рабочей позиции.
Формула изобретения
1.Тележечный конвейер, содержащий раму с направляющими, в которых смонтированы снабженные упорами тележки, соединенные с тяговым органом, установленные на раме привод поворота упоров и остановы тележек и подпружиненные фиксаторы рабочего и нерабочего положений упоров, отличающийся тем, что, с целью обеспечения точного останова при малом шаге перемещений, упоры выполнены в виде группы пластин, установленных на параллельной направляющим оси на расстоянии друг от друга, равном щагу перемещений тележки, причем над каждой пластиной установлен фиксатор.
2.Конвейер по п. 1, отличающийся тем, что каждая пластина выполнена со скосо.м, взаимодействующим с наклонной поверхностью выступа фиксатора.
Источники информации, принятые во внимание при экспертизе
1.Гитлевич А. Д. и др. Механизация и автоматизация сварочного производства. М., Мащгиз, 1972, с. 192.
2.Авторское свидетельство СССР
№ 285611, кл. В 65 G 43/06, 1969 (прототип).
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1983 |
|
SU1133185A1 |
| Поточно-механизированная сборочнаялиНия | 1978 |
|
SU804548A1 |
| Горизонтально-замкнутый тележечный конвейер | 1982 |
|
SU1027105A1 |
| Тележечный конвейер | 1979 |
|
SU870273A1 |
| Вертикально-замкнутый тележечный конвейер | 1985 |
|
SU1265102A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Тележечный конвейер | 1973 |
|
SU470444A1 |
| Тележечный шаговый конвейер | 1973 |
|
SU483318A1 |
| ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1991 |
|
RU2013330C1 |
| Вертикально-замкнутый тележечный конвейер | 1977 |
|
SU745803A1 |
/J
