Изобретение относится к промышленному транспорту, в частности к тележечным конвейерам на участках окраски и сушки крупногабаритных изделий.
Известен горизонтально замкнутый тележечный конвейер, включающий установленные на направляющих тележки, связанные между собой тяговым органом [1] .
Наличие постоянной связи между тележками исключает возможность сокращения расстояния между тележками на отдельных участках, например в местах разворота.
Известен горизонтально замкнутый тележечный конвейер, включающий установленные на направляющих тележки с упорами, взаимодействующие с толкателями цепного органа [2] .
Однако этот конвейер в местах разворота также требует больших производственных площадей.
Известен горизонтально замкнутый тележечный конвейер, содержащий установленные на продольных ходовых путях двух транспортных ветвей тележки с упорами, взаимодействующие с толкателями соответствующих тяговых цепных органов, а также установленные на поперечных ходовых путях, соединяющих транспортные ветви, две самоходные передаточные каретки с грузовыми платформами и электросистему, включающую два блока управления приводами тяговых цепных органов тележек соответствующих ветвей, два блока управления приводами соответствующих самоходных передаточных кареток и подъемных платформ, индивидуальные кнопки "ПУСК", "СТОП", "ВПЕРЕД", "НАЗАД", "ВВЕРХ", "ВНИЗ" [3] .
Этот конвейер является самым близким к заявляемому объекту по технической сущности и достигаемому результату.
Однако он также имеет недостатки:
во-первых, в силу использования традиционного конструктивного выполнения толкатели цепных тяговых органов вступают во взаимодействие одновременно с упорами всех тележек, в результате чего резко возрастают пусковые нагрузки и мощность приводов, значительно увеличивается энергопотребление, ухудшается эффективность использования, снижается надежность в работе;
во-вторых, толкатели на тяговых цепных органах закреплены жестко, что исключает возможность их реверсирования при перемещении тележек только в одну сторону, ограничивает область применения и ухудшает ремонтопригодность;
в-третьих, в электросистеме отсутствуют средства контроля исходного и рабочего положений исполнительных механизмов и средства мгновенного реагирования при отклонениях от нормы, что не исключает столкновений перегрузочных кареток с тележками и не гарантирует высокой надежности в работе.
Целью изобретения является повышение надежности в работе и улучшение энергетических показателей за счет снижения пусковых нагрузок путем обеспечения поочередного разгона тележек.
Поставленная цель достигается тем, что в горизонтально замкнтом тележечном конвейере каждый привод тяговых цепных органов выполнен возвратно-поступательным с шаговым перемещением, а каждый толкатель смонтирован на тяговом цепном органе с возможностью одностороннего активного взаимодействия с упорами тележек, причем количество толкателей меньше количества адресных позиций соответствующей ветви конвейера на единицу, а расположение толкателей идентично расположению адресных позиций с первой по предпоследнюю включительно, при этом каждый толкатель направлен противоположно ходу перемещения тележек, в каждой ветви конвейера расстояние между последующими и предыдущими адресными позициями увеличивается в геометрической прогрессии на длину пути разгона тележки, а самое большее расстояние между последней и предпоследней адресными позициями меньше шага перемещения тягового цепного органа на величину пути разгона тележки, при этом электросистема дополнительно снабжена датчиками исходного положения и датчиками рабочего хода тяговых цепных органов и передаточных кареток, датчиками ограничения хода "Вверх" и "Вниз" грузовых платформ передаточных кареток, логическим элементом И и логическим элементом ИЛИ-НЕ, причем в блоках управления приводами цепных органов первой и второй транспортных ветвей конвейера дополнительные третьи входы соединены с выходами соответствующих датчиков исходного положения, четвертые входы - с выходами соотвтствующих датчиков рабочего хода, пятые входы - с выходом логического элемента И, первый вход которого подключен к выходу датчика исходного положения первой передаточной каретки и дополнительному шестому входу блока управления приводами этой же каретки, а второй вход - к выходу датчика исходного положения второй передаточной каретки и дополнительному шестому входу блока управления приводами этой же каретки, в блоке управления приводами каждой передаточной каретки седьмой, восьмой и девятый входы соединены с выходами соответственно датчика рабочего хода и датчиков ограничения хода "ВВЕРХ" и "ВНИЗ" грузовых платформ, а десятый - с выходом логического элемента ИЛИ-НЕ, грузовых платформ, а десятый - с выходом логического элемета ИЛИ-НЕ, первый, второй, третий и четвертый входы которого соединены соответственно с первым и вторым выходами блока управления приводом цепного органа первой ветви конвейера и первым и вторым выходами блока управления приводом цепного органа второй ветви конвейера.
Блок управления приводом цепного органа выполнен в виде двух элементов И, двух элементов ИЛИ и пяти элементов НЕ, причем в блоке управления приводом цепного органа первый вход соединен с первым входом первого элемента ИЛИ, второй вход - через первый элемент НЕ с первыми входами первого и второго элементов И, третий вход - через второй элемент НЕ с вторым входом второго элемента И, четвертый вход - с первым входом второго элемента ИЛИ и через третий элемент НЕ с вторым входом первого элемента И, пятый вход - с третьими входами первого и второго элементов И, первый выход блока соединен с выходом первого элемента И, вторым входом первого элемента ИЛИ и через четвертый элемент НЕ с четвертым входом второго элемента И, пятый вход которого соединен с выходом второго элемента ИЛИ, а второй выход блока соединен с выходом второго элемента И, вторым входом второго элемента ИЛИ и через пятый элемент НЕ с четвертым входом первого элемента И, пятый вход которого соединен с выходом первого элемента ИЛИ.
Блок управления приводами передаточной каретки выполнен в виде четырех элементов И, четырех элементов ИЛИ и девяти элементов НЕ, причем в блоке первый, второй, третий и четвертый входы соединены с первыми входами соответственно первого, второго, третьего и четвертого элементов ИЛИ, пятый вход - через первый элемент НЕ с первыми входами первого, второго, третьего и четвертого элементов И, шестой вход - через второй элемент НЕ с вторым входом четвертого элемента И, седьмой вход - через третий элемент НЕ с вторым входом третьего элемента НЕ, восьмой вход - через четвертый элемент НЕ с вторым входом второго элемента И, девятый вход - через пятый элемент НЕ с вторым входом первого элемента И, десятый вход - с третьими входами первого, второго, третьего и четвертого элементов И, первый выход блока соединен с выходом первого элемента И, вторым входом первого элемента ИЛИ и через шестой элемент НЕ с четвертым входом второго элемента И, пятый вход которого соединен с выходом второго элемента ИЛИ, второй выход блока соединен с выходом второго элемента И, вторым входом второго элемента ИЛИ и через седьмой элемент НЕ с четвертым входом первого элемента И, пятый вход которого соединен с выходом первого элемента ИЛИ, третий выход блока соединен с выходом третьего элемента И, вторым входом третьего элемента И, вторым входом третьего элемента ИЛИ и через восьмой элемент НЕ с четвертым входом четвертого элемента И, пятый вход которого соединен с выходом четвертого элемента ИЛИ, а четвертый выход блока соединен с выходом четвертого элемента И, вторым входом четвертого элемента ИЛИ и через десятый элемент НЕ с четвертым входом третьего элемента И, пятый вход которого соединен с выходом третьего элемента ИЛИ.
Каждый взаимодействующий с упором тележки толкатель выполнен в виде шарнирно закрепленного на тяговом цепном органе вертикального выступающего рычага, жесткого ограничителя поворота и возвратной пружины, при этом возвратная пружина с одной стороны соединена с жестким ограничителем поворота, а с другой стороны - со свободным концом вертикального выступающего рычага.
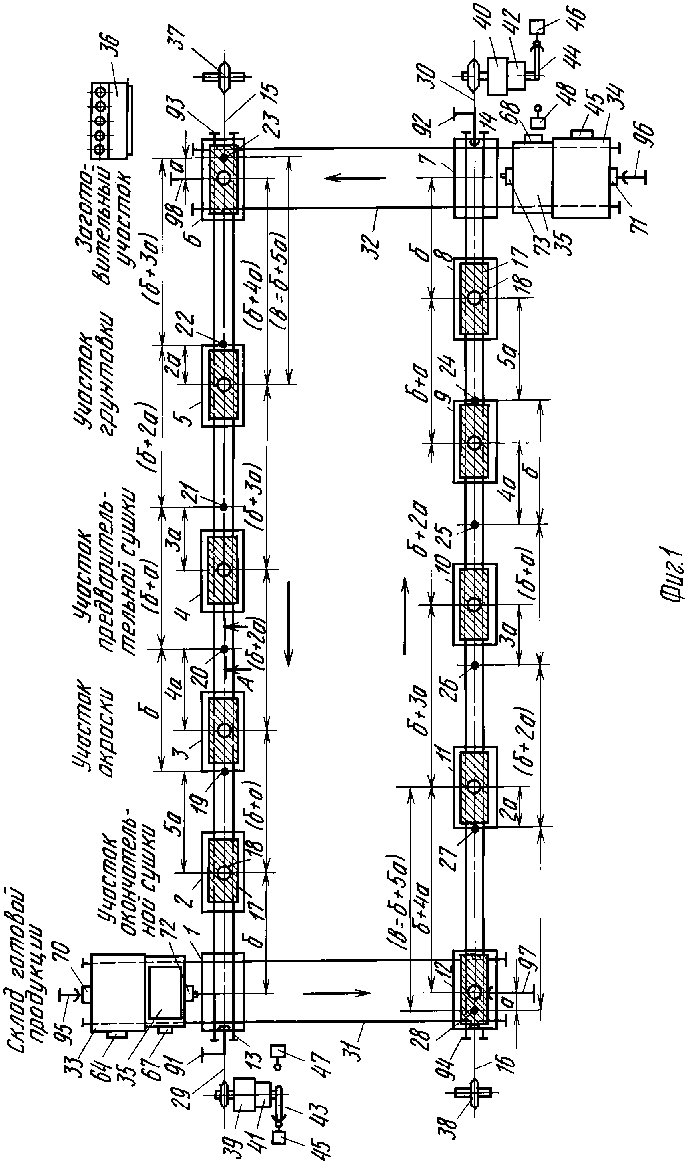
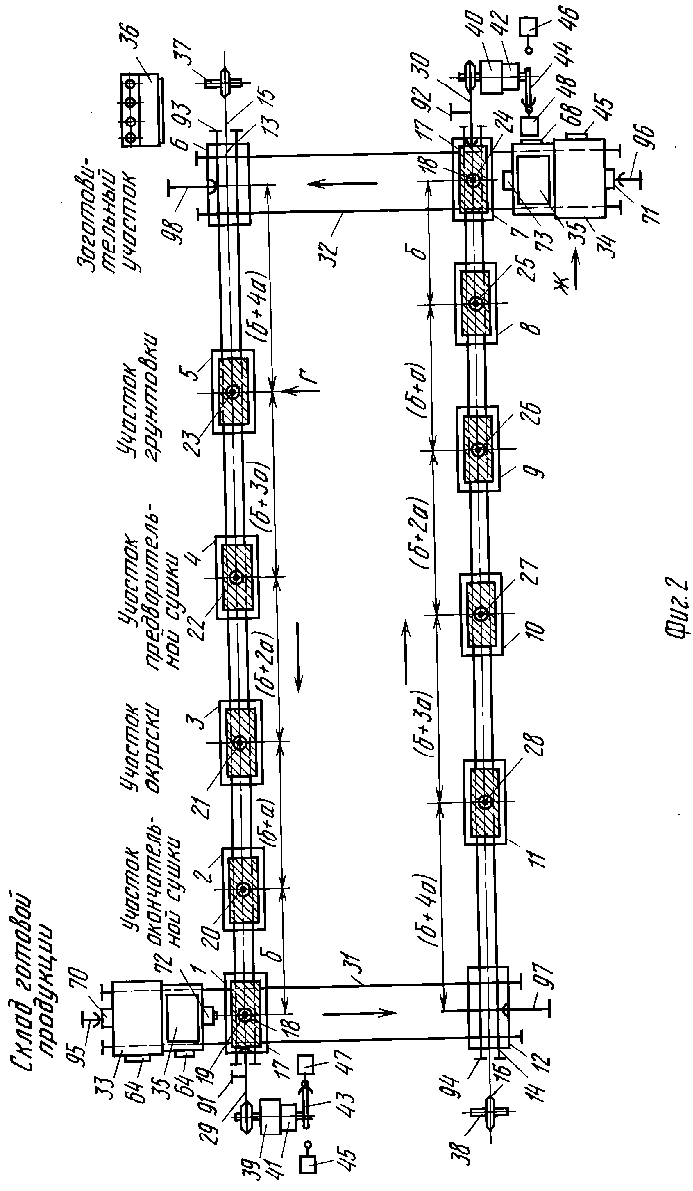
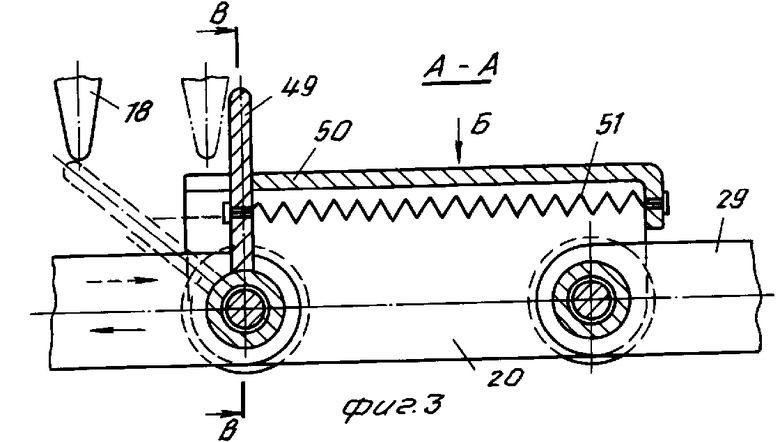
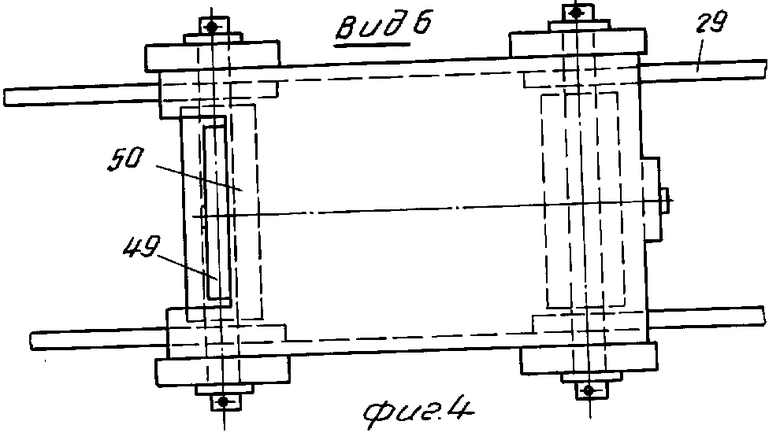
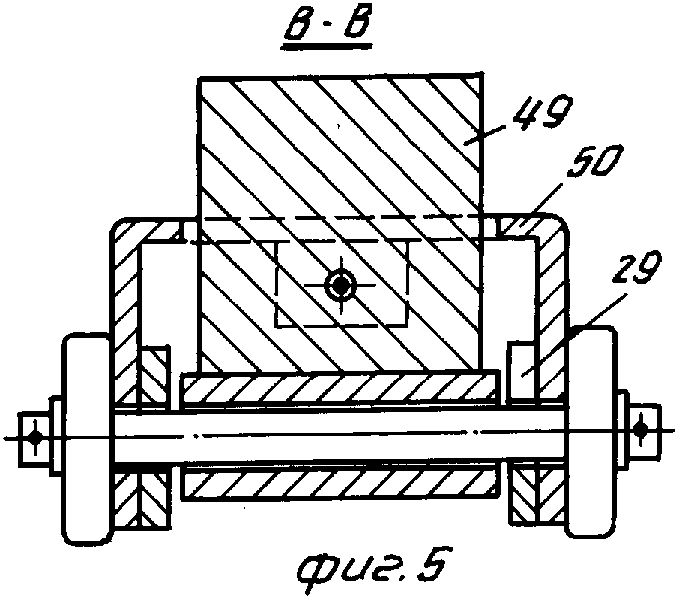
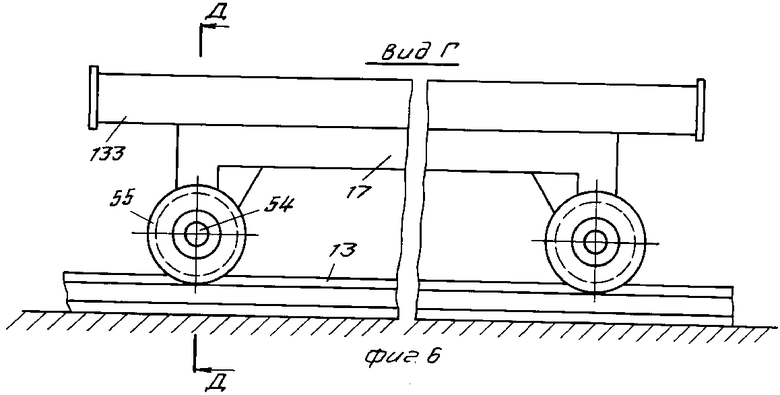
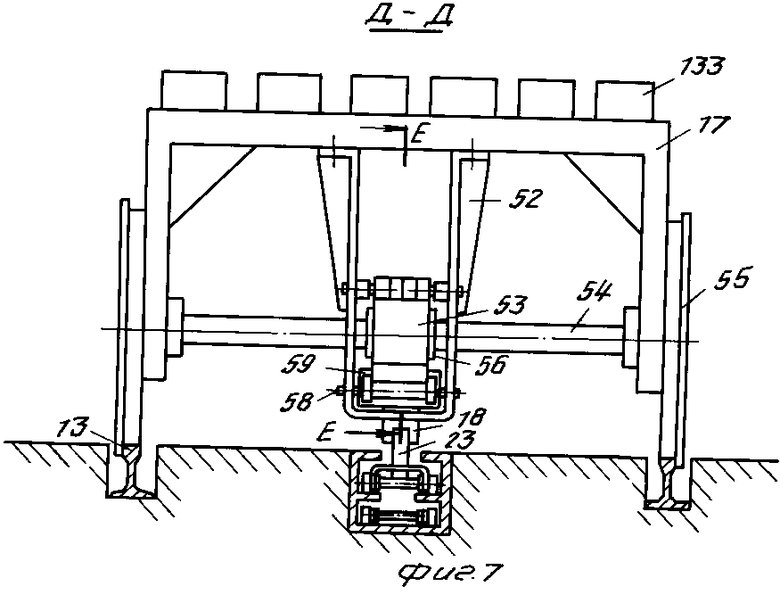
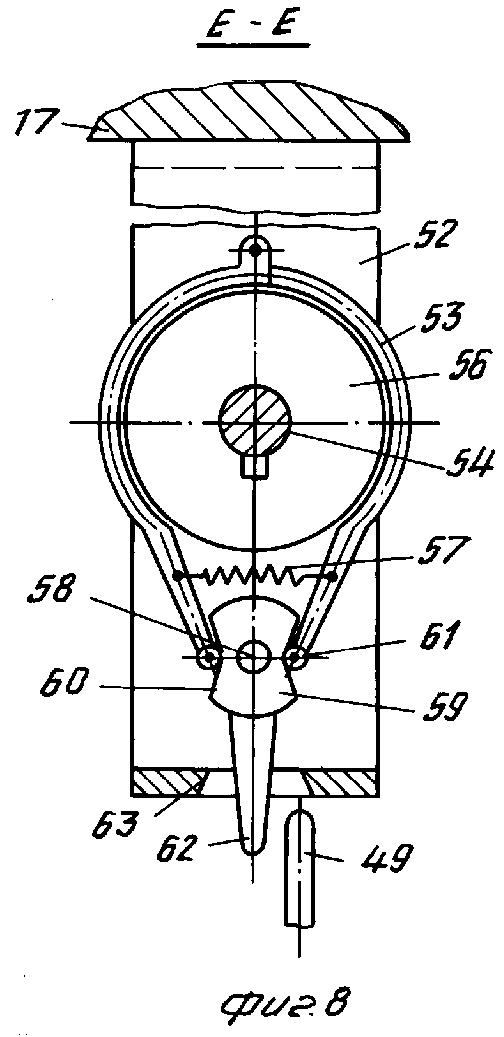
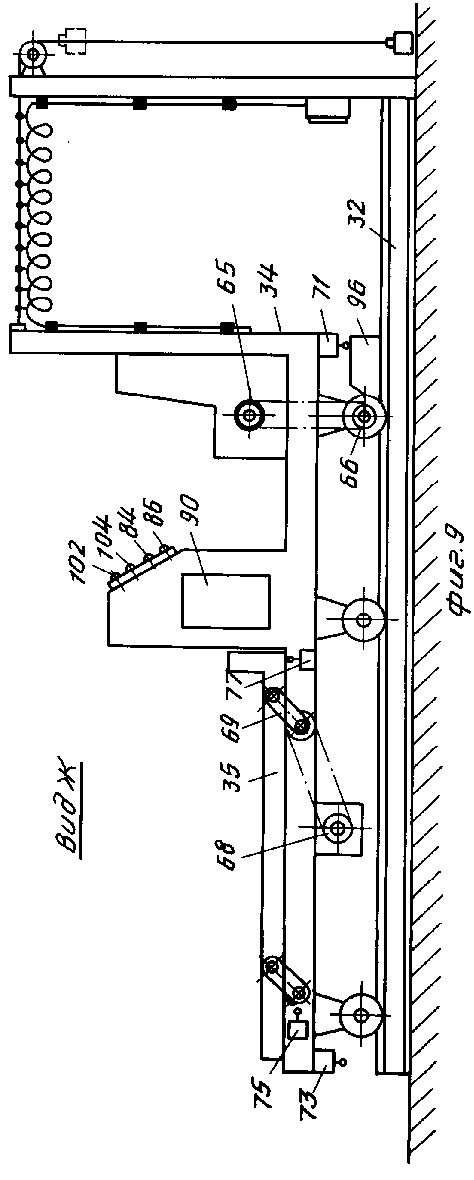
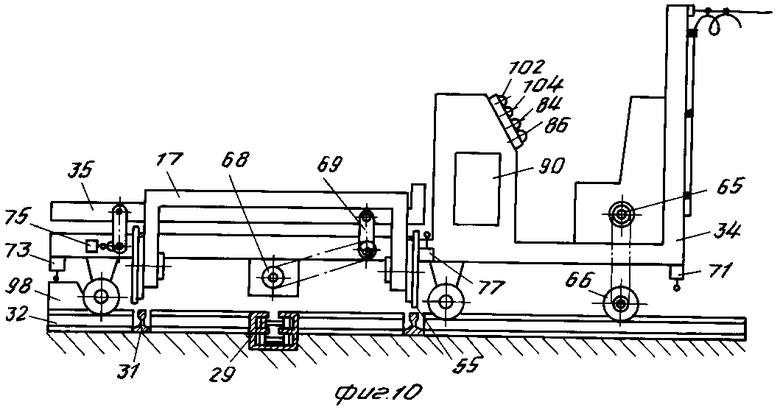
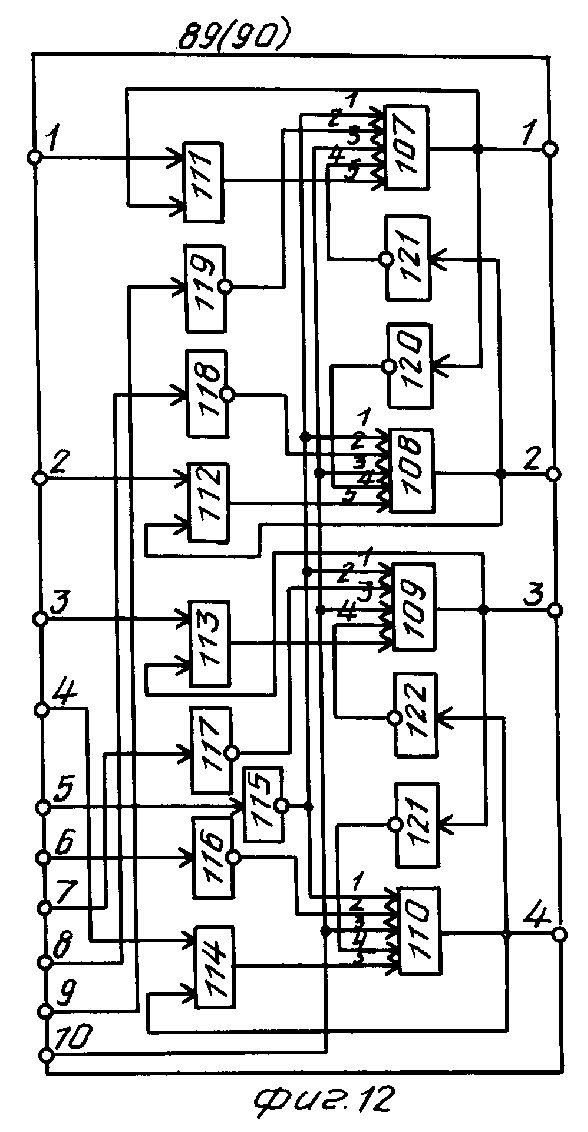
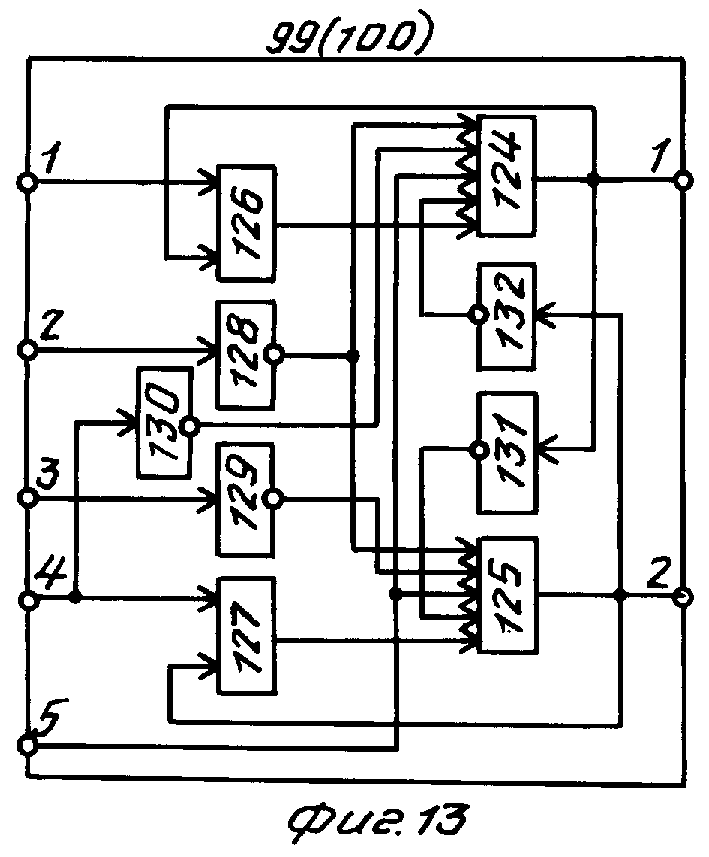
На фиг. 1 изображен горизонтально замкнутый тележечный конвейер при исходном положении тяговых цепных органов; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - толкатель тягового цепного органа (разрез А-А на фиг. 1); на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 3; на фиг. 6 - тележка (вид Г на фиг. 2); на фиг. 7 - взаимодействие тележки с тяговым цепным органом, (разрез Д-Д на фиг. 6); на фиг. 8 - упор и тормозная система тележки (разрез Е-Е на фиг. 7); на фиг. 9 - передаточная тележка в исходном положении (вид Ж на фиг. 2); на фиг. 10 - то же, в рабочем положении; на фиг. 11 - структурная схема электросистемы горизонтально замкнутого тележечного конвейера; на фиг. 12 - функциональная логическая схема блока управления приводами передаточной каретки и грузовой платформы; на фиг. 13 - функциональная логическая схема блока управления приводом тягового цепного органа тележек.
Горизонтально замкнутый тележечный конвейер цеха окраски крупногабаритных металлоконструкций содержит установленные по адресным позициям 1 - 12 транспортных ветвей 13 и 14 на продольных ходовых рельсовых путях 15 и 16 тележки 17 с упорами 18, взаимодействующими с толкателями 19 - 28 тяговых цепных органов 29 и 30, а также смонтированные на поперечных ходовых рельсовых путях 31 и 32 самоходные передаточные каретки 33 и 34 с грузовыми платформами 35 и центральный пульт 36 управления электросистемой конвейера.
Нумерация адресных позиций 1 - 6 на продольном пути 15 транспортной ветви 13 возрастает слева направо, а нумерация адресных позиций 7 - 12 на продольном пути 16 транспортной ветви 14 возрастает справа налево, т. е. против направления перемещения тележки 17, причем в обеих транспортных ветвях расстояние между каждой последующей и предыдущей адресными позициями по ходу возрастания их нумерации увеличивается в геометрической прогрессии на длину пути "а" разгона тележки, т. е. расстояние между адресными позициями 2 и 1, а также позициями 8 и 7 равно например, б; расстояние между адресными позициями 3 и 2, а также позициями 9 и 8 равно б+а; расстояние между адресными позициями 4 и 3, а также позициями 10 и 9 равно б+2а; расстояние между адресными позициями 5 и 4, а также позициями 11 и 10 равно б+3а; расстояние между адресными позициями 6 и 5, а также позициями 12 и 11 равно б+4а.
Транспортная ветвь 13 предназначена для перемещения по продольному пути 15 груженых тележек, а транспортная ветвь 14 - для перемещения по продольному пути 16 порожних тележек.
На транспортной ветви 13 адресные позиции расположены в соответствии с технологической последовательностью: позиция 6 - на заготовительном участке, позиция 5 - на участке грунтовки, позиция 4 - на участке предварительной сушки, позиция 3 - на участке окраски, позиция 2 - на участке окончательной сушки и позиция 1 - на складе готовой продукции.
Адресная позиция 1 продольного пути 15 транспортной ветви 13 также расположена на заготовительном участке и соединена с адресной позицией 12 продольного пути 16 транспортной ветви 14 посредством поперечного ходового пути 31 самоходной передаточной каретки 33, а адресная позиция 6 продольного пути 15 транспортной ветви 13 - на складе готовой продукции и соединена с адресной позицией 7 продольного пути 16 транспортной ветви 14 посредством поперечного ходового пути 32 самоходной каретки 34.
Тяговые цепные органы 29 и 30 снабжены натяжными устройствами 37 и 38, кинематически связаны с реверсивными приводами 39 и 40, через масштабные устройства 41 и 42 и воздействующие элементы 43 и 44 взаимодействуют с датчиками 45, 46 исходного положения и 47, 48 рабочего хода.
На тяговых цепных органах 29 и 30 количество толкателей меньше на один количества адресных позиций соответствующих транспортных ветвей, причем на цепном органе 29 транспортной ветви 13 размещение толкателей 19 - 23 точно соответствует расположению адесных позиций 1 - 5 и межпозиционному их расстоянию, а на цепном органе 30 транспортной ветви 14 размещение толкателей 24 - 28 точно соответствует расположению адресных позиций 7 - 11 и межпозиционному их расстоянию.
Приводы 39 и 40 выполнены с возможностью реализации возвратно-поступательного шагового перемещения соответствующих тяговых цепных органов 29 и 30, а толкатели 19 - 28 - с возможностью одностороннего активного взаимодействия с упорами 18 тележек 17. При этом длина шага "в" перемещения цепных органов 29 и 30 контролируется соответствующими датчиками 45 и 46 исходного положения и датчиками 47 и 48 рабочего хода и она больше на величину длины пути "а" разгона тележки по сравнению с самым большим расстоянием б+4а между соответствующими последними 6, 12 и предпоследними 5, 11 адресными позициями или равна самому малому расстоянию б плюс пятикратная длина пути 4а разгона тележки, т. е. в= б+5а (см. фиг. 1).
Толкатели 19 - 28 выполнены в виде шарнирно закрепленного на соответствующем тяговом цепном органе вертикально выступающего рычага 49, жесткого ограничителя 50 и возвратной пружины 51, при этом последняя с одной стороны соединена с жестким ограничителем 50, а с другой стороны - со свободным концом вертикального выступающего рычага 49. Тележка 17 содержит раму 52, на которой шарнирно закреплены тормозные колодки 53, охватывающие установленный на оси 54 колес 55 тормозной диск 56. Тормозные колодки 53 поджаты своими внутренними поверхностями к тормозному диску 56 связывающей их между собой пружиной 57. На раме 52 также установлена поворотная ось 58, на которой жестко закреплен кулачок 59, имеющий симметричные вогнутые поверхности 60, взаимодействующие посредством роликов 61 с концами тормозных колодок 53
Упор 18 на тележке 17 выполнен в виде рычага 62, один конец которого также жестко закреплен на оси 58, а другой свободный конец опущен и расположен между ограничителями 63 поворота.
Для обеспечения передачи тележек 17 с одной транспортной ветви на другую на самоходных передаточных каретках 33 и 34 установлены приводы 64 и 65, кинематически связанные с их колесами 66, приводы 67 и 68, кинематически связанные с механизмами 69 подъема грузовых платформ 35, датчики 70, 71 исходного и 72, 73 рабочего положений, датчики 74, 75 верхнего и 76, 77 нижнего положений грузовых платформ, кнопки 78, 79 "ВПЕРЕД", 80, 81 "НАЗАД", 83, 84 "ВВЕРХ", 85, 86 "ВНИЗ", 87, 88 "СТОП", блоки 89, 90 управления приводами кареток и грузовых платформ.
Для надежного взаимодействия тележек 17 с самоходными передаточными каретками 33 и 34 на продольных ходовых путях предусмотрены тупиковые упоры 91, 92 исходного и 93, 94 рабочего положений, а на поперечных ходовых путях 31 и 32 также предусмотрены тупиковые упоры 95, 96 исходного и 97, 98 рабочего положений.
Центральный пульт 36 управления электросистемой включает блоки 99 и 100 управления приводами 39, 40 тяговых цепных органов транспортных ветвей 13 и 14, кнопки 101, 102 "ПУСК", 103, 104 "СТОП", а также предохранительная, контрольная и информационная аппаратура (не показаны).
Структурная схема электросистемы конвейера (фиг. 11) включает приводы 39 и 40 тяговых цепных органов тележек, приводы 64 и 65 самоходных передаточных кареток, приводы 67 и 68 грузовых платформ, блоки 89 и 90 управления приводами самоходных передаточных кареток и грузовых платформ, блоки 99 и 100 управления приводами тяговых цепных органов тележек, датчики 45 и 46 исходного положения и датчики 47 и 48 рабочего хода тяговых цепных органов, датчики 70 и 71 исходного положения и датчики 72 и 73 рабочего хода самоходных передаточных кареток, датчики 74 и 75 ограничения хода и 76 и 77 "ВНИЗ" грузовых платформ, кнопки 78 и 79 "ВПЕРЕД", 80, 81 "НАЗАД", 83 и 84 "ВВЕРХ", 85 и 86 "ВНИЗ", 87 и 88 "СТОП" управления исполнительными механизмами самоходных передаточных кареток, кнопки 101 и 102 "ПУСК" и 103 и 104 "СТОП" управления перемещением тяговыми цепными органами, элемент И 105 и элемент ИЛИ-НЕ 106. В блоках 89 и 90 первые входы соединены с выходами кнопок 85 и 86 "ВНИЗ", вторые входы - с выходами кнопок 83 и 84 "ВВЕРХ", третьи входы - с выходами кнопок 78 и 79 "ВПЕРЕД", четвертые входы - с выходами кнопок 80 и 81 "НАЗАД", пятые входы - с выходами кнопок 87 и 88 "СТОП", шестые входы - с выходами датчиков 70 и 71 исходного положения передаточной каретки и соответственно с первым и вторым входами элемента И 105, седьмые входы - с выходами датчиков 72 и 73 рабочего хода передаточных кареток, восьмые входы с выходами датчиков 74 и 85 ограничения хода "ВВЕРХ" грузовых платформ, девятые входы - с выходами датчиков 76 и 77 ограничения хода "ВНИЗ" грузовых платформ, десятые входы - с выходом элемента ИЛИ-НЕ 106; первые выходы - с первыми входами приводов 67 и 68 грузовых платформ, вторые выходы - с вторыми входами приводов 67 и 68 грузовых платформ, третьи выходы - с первыми входами приводов 64 и 65 передаточных кареток, четвертые выходы - с вторыми входами приводов 64 и 65 передаточных кареток. В блоках 99 и 100 первые входы соединены с выходами кнопок 101 и 102 "ПУСК", вторые входы - с входами соответствующих кнопок 103 и 104 "СТОП", третьи входы - с выходами датчиков 45 и 46 исходного положения тяговых цепных органов, четвертые входы - с выходами датчиков 47 и 48 рабочего хода тяговых цепных органов, пятые входы - с выходом элемента И 105; первые выходы - с первыми входами приводов 39 и 40 тяговых цепных органов и соответственно с первым и вторым входами элемента ИЛИ-НЕ 106, вторые выходы - с вторыми входами приводов 39 и 40 тяговых цепных органов и соответственно с третьими и четвертыми входами элемента ИЛИ-НЕ 106.
Каждый из блоков управления приводами передаточных кареток и грузовых платформ (фиг. 12) включает элементы И 107-110, элементы ИЛИ 111 - 114 и элементы НЕ 115 - 122. В блоке первый, второй, третий и четвертый входы соединены с первыми входами соответственно элементов ИЛИ 111 - 114, пятый вход - через элемент НЕ 115 - с первыми входами элементов И 107 - 110, шестой вход - через элемент НЕ 116 с вторым входом элемента И 110, седьмой вход - через элемент НЕ 117 с вторым входом элемента И 109, восьмой вход - через элемент НЕ 118 с вторым входом элемента И 108, девятый вход - через элемент НЕ 119 с вторым входом элемента И 107, десятый вход - с третьими входами элементов И 107 - 110, первый выход - с выходом элемента И 107, вторым входом элемента ИЛИ 111 и через элемент НЕ 120 с четвертым входом элемента И 108, пятый вход которого соединен с выходом элемента ИЛИ 112, второй выход блока соединен с выходом элемента И 108, вторым входом элемента ИЛИ 112 и через элемент НЕ 121 с четвертым входом элемента И 107, пятый вход которого соединен с выходом элемента ИЛИ 111, третий выход блока соединен с выходом элемента И 109, вторым входом элемента ИЛИ 113, через элемент НЕ 122 с четвертым входом элемента И 110, пятый вход которого соединен с выходом элемента ИЛИ 114, а четвертый выход блока соединен с выходом элемента И 110, вторым входом элемента ИЛИ 114 и через элемент НЕ 122 с четвертым входом элемента И 109, пятый вход которого соединен с выходом элемента ИЛИ 113.
Каждый из блоков управления приводами тяговых цепных органов тележек (фиг. 13) включает элементы И 124 и 125, элементы ИЛИ 126 и 127 и элементы НЕ 128 - 132. В блоке первый вход соединен с первым входом элемента ИЛИ 126, второй вход - через элемент НЕ 128 с первыми входами элементов И 124 и 125, третий вход - через элемент НЕ 129 с вторым входом элемента И 125, четвертый вход - с первым входом элемента ИЛИ 127 и через элемент НЕ 130 с вторым входом элемента И 124, пятый вход - с третьими входами элементов И 124 и 125; первый выход блока соединен с выходом элемента И 124, вторым входом элемента ИЛИ 126 и через элемент НЕ 131 с четвертым входом элемента И 125, пятый вход которого соединен с выходом элемента ИЛИ 127, второй выход блока соединен с выходом элемента И 125, вторым входом элемента ИЛИ 127 и через элемент НЕ 132 с четвертым входом элемента И 124, пятый вход которого соединен с выходом элемента ИЛИ 126.
Конвейер работает следующим образом.
Перед запуском конвейера необходимо в "наладочном" режиме все механизмы выставить в исходное положение, т. е. должны быть включены датчики 45 и 46 исходного положения тяговых цепных органов обеих транспортных ветвей, датчики 70 и 71 исходного положения передаточных кареток соответственно заготовительного участка и склада готовой продукции, кнопки 85 и 86 ограничения хода "Вниз" грузовых платформ передаточных кареток, при этом на всех указанных датчиках на выходах имеются сигналы, причем сигналы с выхода датчиков 45 и 46 поступают на третьи запретные входы блоков 99 и 100 управления приводами тяговых цепных органов соответствующих транспортных ветвей, а с выходов датчиков 70 и 71 поступают на шестые запретные входы блоков 89 и 90.
После завершения загрузки тележки 17 на адресной позиции 6 заготовительного участка крупными металлоконструкциями 133 оператор первой транспортной ветви воздействует на кнопку "Пуск" 101, в результате чего на ее выходе появляется сигнал, который поступает на первый вход блока 99 и через первый вход элемента ИЛИ 126 на пятый вход элемента И 124. Наличие сигналов одновременно на всех входах элемента И 124 вызывает появление сигнала на его выходе, который поступает на второй вход элемента ИЛИ 126 (запоминается), а также на вход элемента НЕ 131 (запрет противовключения), первый выход блока 99, первый вход привода 39 и первый вход элемента ИЛИ-НЕ 106, в результате чего исчезают сигналы на его выходе и десятых входах блоков 89 и 90, благодаря чему предотвращается перемещение передаточных кареток и исключаются аварийные ситуации.
Привод 39 и масштабное устройство 41 без особых усилий начинают вращательное движение, в результате чего датчик 45 исходного положения освобождается от воздействующего элемента 43, а толкатели 19 - 23 на тяговом цепном органе 29 перемещаются в сторону склада готовой продукции, т. е. от адресной позиции 6 к адресной позиции 1.
После преодоления расстояния а и завершения облегченного разгона тягового цепного органа 29 (без нагрузки) сначала толкатель 23 вступает во взаимодействие с упором 18 тележки 17, расположенной на адресной позиции 6, в результате чего рычаг 62 упора 18 преодолевает усилие пружины 57 и поворачивается одновременно с осью 58 и кулачком 59, который посредством роликов 61 осуществляет разжим тормозных колодок 53 и освобождение тормозного диска 56, а при окончательном повороте рычаг 62 упирается в ограничитель 63 и колеса 55 начинают свободно перемещаться по рельсовым путям 15, осуществляя разгон груженой тележки 17 и передвижение ее с заготовительного участка на участок грунтовки, т. е. с адресной позиции 6 на адресную позицию 5.
Возвратная пружина 57 тормозной системы также выполняет функции демпфера, благодаря чему при взаимодействии толкателя 23 с упором 18 исключаются резкие удары и обеспечивается плавный разгон тележки 17. После преодоления расстояния 2а и завершения полного разгона тележки 17 на адресной позиции 6 толкатель 22 тягового цепного органа 29 вступает во взаимодействие с упором 18 тележки 17, расположенной на адресной позиции 5, в результате чего осуществляется ее растормаживание и разгон.
После преодоления расстояния 3а и завершения полного разгона тележки 17 на адресной позиции 5 толкатель 21 тягового цепного органа 29 вступает во взаимодействие с упором 18 тележки 17, расположенной на адресной позиции 4, в результате чего осуществляется ее растормаживание и плавный разгон, причем этому также значительно способствует масса и инерционные силы ранее разогнанной предыдущей тележки 17 на адресной позиции 5, что явилось существенным основанием для снижения мощности привода тягового цепного органа 29 и уменьшения потребляемой электроэнергии.
После преодоления расстояния 4а и завершения полного разгона тележки 17 на адресной позиции 4 толкатель 20 тягового цепного органа 29 вступает во взаимодействие с упором 18 тележки 17, расположенной на адресной позиции 3, в результате чего осуществляется аналогичное ее растормаживание и разгон.
После преодоления расстояния 5а и завершения полного разгона тележки 17 на адресной позиции 3 толкатель 19 тягового цепного органа 29 вступает во взаимодействие с упором 18 тележки 17, расположенной на адресной позиции 2, в результате чего осуществляется аналогичное ее растормаживание и разгон.
Таким образом, благодаря использованию предложенного расположения адресных позиций и предложенному конструктивному выполнению и размещению толкателей на тяговом цепном органе удалось обеспечить поочередный через определенный линейный интервал запуск каждой последующей тележки, что позволяет значительно снизить пусковые нагрузки, уменьшить мощность привода и энергопотребление, повысить надежность их в работе и увеличить долговечность.
После преодоления расстояния (в= б+5а), соответствующего полному шагу перемещения тягового цепного органа 29, воздействующий элемент 43 вступает во взаимодействие с датчиком 47 рабочего хода, в результате чего на его выходе появляется сигнал, который поступает на четвертый вход блока 99, вход элемента НЕ 130 и первый вход элемента ИЛИ 127.
Наличие сигнала на входе элемента НЕ 130 вызывает исчезновение сигнала на его выходе, выходе элемента И 124, первом выходе блока 99, первом входе привода 39 и первом входе элемента ИЛИ-НЕ 106, в результате чего прекращается перемещение тягового цепного органа 29 и все тележки 17, переместившись на последующие адресные позиции 5, 4, 3, 2, 1 и одновременно освободившись по инерции от толкателей 23, 22, 21, 20, 19, автоматически сразу же с помощью возвратных пружин 57 становятся на тормоз и одновременно прекращают движение. Кроме того, прибывшая тележка 17 на адресную позицию 1 склада готовой продукции после инерционного выбега также взаимодействует с тупиковым упором 91, благодаря которому она точно фиксируется напротив поперечного ходового рельсового пути 31 передаточной каретки.
Наличие сигнала на первом входе элемента ИЛИ 127 вызывает появление сигнала на его выходе, выходе элемента И 125, втором входе элемента ИЛИ 127 (запоминается), входе элемента НЕ 132 (запрет противовключения), втором выходе блока 99, втором входе привода 39 и втором входе элемента ИЛИ-НЕ 106 (запрет включения передаточных кареток), в результате чего тяговый цепной орган 29 начинает перемещаться в обратном направлении, а датчик 47 рабочего хода освобождается от воздействующего элемента 43.
Так как усилие возвратных пружин 57 в тормозных системах значительно выше усилия возвратных пружин 51 толкателей 19 - 23, то их рычаги 49 при взаимодействии с рычагами 62 упоров 18 отклоняются и проходят мимо тележек 17, благодаря чему при реверсивной работе привода 39 тягового цепного органа обеспечивается одностороннее шаговое перемещение всех тележек.
После преодоления на обратном пути расстояния (в= б+5а), соответствующего полному шагу перемещения тягового цепного органа 29, воздействующий элемент 43 вступает во взаимодействие с датчиком 45 исходного положения, в результате чего на его входе появляется сигнал, который поступает на третий вход блока 99 и вход элемента НЕ 129. Наличие сигнала на входе последнего вызывает исчезновение сигнала на его выходе, выходе элемента И 125, втором выходе блока 99, втором входе элемента ИЛИ-НЕ 106 и втором входе привода 39, в результате чего прекращается перемещение тягового цепного органа 29 в обратном направлении.
Таким образом завершается рабочий цикл шагового перемещения тележек 17 с адресной позиции 2 участка окончательной сушки на адресную позицию 1 склада готовой продукции, с адресной позиции 3 участка окраски на адресную позицию 2 участка окончательной сушки, с адресной позиции 4 участка предварительной сушки на адресную позицию 3 участка окраски, с адресной позиции 5 участка грунтовки на адресную позицию 4 участка предварительной сушки, с адресной позиции 6 заготовительного участка на адресную позицию 5 участка грунтовки, т. е. расположенные на тележках крупногабаритные металлоконструкции 133 последовательно проходят через все необходимые технологические позиции. После этого с прибывшей на адресную позицию 1 склада готовой продукции тележки 17 осуществляется выгрузка полностью обработанных согласно технологической программы крупногабаритных металлоконструкций, а также одновременно осуществляются подготовительные работы для доставки порожней тележки 17 на освободившуюся адресную позицию 6 заготовительного участка. Для этого оператор, убедившись в готовности транспортной ветви 14, воздействует на кнопку "ПУСК" 102, в результате чего на ее выходе появляется сигнал, который поступает на первый вход блока 100 и через первый вход элемента ИЛИ 125 на пятый вход элемента И 124.
Наличие сигналов одновременно на всех входах элемента И 124 вызывает появление сигнала на его выходе, втором входе элемента ИЛИ 126 (запоминается), входе элемента НЕ 131 (запрет противовключения), первом выходе блока 100, третьем входе элемента ИЛИ-НЕ 106 (запрет включения передаточных кареток) и первом входе привода 40.
Привод 40 аналогично транспортной ветви 13 приводит во вращательное движение масштабное устройство 42 и поступательное движение тяговый цепной орган 30 с учетом обеспечения поочередного разгона тележек, начиная с адресной позиции 12 склада готовой продукции и кончая адресной позицией 8 перед заготовительным участком, а также перемещение их на последующие адресные позиции 11, 10, 9, 8, 7.
После преодоления расстояния (в= б+5а), соответствующего полному шагу перемещения тягового цепного органа 30, воздействующий элемент 44 вступает во взаимодействие с датчиком 48 рабочего хода, в результате чего на его выходе появляется сигнал, который поступает на четвертый вход блока 100, вход элемента НЕ 130 и первый вход элемента ИЛИ 127. Наличие сигнала на входе элемента НЕ 130 вызывает исчезновение сигнала на его выходе, выходе элемента И 124, первом выходе блока 100, первом входе привода 40 и третьем входе элемента ИЛИ-НЕ 106, в результате чего прекращается перемещение тягового цепного органа 30 и все тележки 17, переместившись на последующие адресные позиции 11, 10, 9, 8, 7 и одновременно освободившись по инерции от толкателей 28, 27, 26, 25, 24, автоматически сразу же с помощью возвратных пружин 57 становятся на тормоз и одновременно прекращают движение. Кроме того, прибывшая тележка 17 на адресную позицию 7 заготовительного участка после инерционного выбега также взаимодействует с тупиковым упором 92, благодаря которому она точно фиксируется напротив поперечного ходового рельсового пути 32 передаточной каретки 34.
Наличие сигнала на первом входе элемента ИЛИ 127 вызывает появление сигнала на его выходе, выходе элемента И 125, втором входе элемента ИЛИ 127 (запоминается), входе элемента НЕ 132 (запрет противовключения), втором выходе блока 100, втором входе привода 40 и четвертом входе элемента ИЛИ-НЕ 106 (запрет включения передаточных кареток), в результате чего тяговый цепной орган 30 начинает перемещаться в обратном направлении, при этом его толкатели аналогично транспортной ветви 13 также отклоняются и проходят мимо тележек 17.
После преодоления на обратном пути расстояния (в= б+5а), соответствующего полному шагу перемещения тягового цепного органа 30, воздействующий элемент 44 вступает во взаимодействие с датчиком 46 исходного положения, в результате чего на его входе появляется сигнал, который поступает на третий вход блока 100 и вход элемента НЕ 130.
Наличие сигнала на входе последнего вызывает исчезновение сигнала на его выходе, выходе элемента И 124, втором выходе ИЛИ-НЕ 106, в результате чего прекращается перемещение тягового цепного органа 30 в обратном направлении и на выходе элемента ИЛИ-НЕ 106 появляется сигнал, который поступает на десятые входы блоков 89, 90, т. е. дается разрешение на включение приводов передаточных кареток 33 и 34.
Оператор, убедившись в готовности поперечного рельсового ходового пути 32, дает команду на перегрузку порожней тележки с адресной позиции 7 продольного ходового пути 16 транспортной ветви 14 на адресную позицию 6 продольного ходового пути 15 транспортной ветви 13. Для этого оператор на передаточной каретке 34 воздействует на кнопку "ВПЕРЕД" 79, в результате чего на ее выходе появляется сигнал, который поступает на третий вход блока 90 и через первый вход элемента ИЛИ 113 на пятый вход элемента И 109.
Наличие сигналов одновременно на всех входах элемента И 109 вызывает появление сигнала на его выходе, втором входе элемента ИЛИ 113 (запоминается), входе элемента НЕ 122 (запрет противовключения), третьем выходе блока 90 и первом входе привода 65, в результате чего колеса 66 начинают вращаться, а передаточная каретка 34 перемещаться по поперечному ходовому пути 32 в сторону порожней тележки 17 на адресной позиции 7 продольного ходового пути 16 транспортной ветви, при этом освобождается от воздействия датчик 71, а также исчезает сигнал на его выходе, выходе элемента И 105, пятых входах блоков 99 и 100 и третьих входах элементов И 124, 125, благодаря чему предотвращается перемещение тележек и исключаются аварийные ситуации.
После того как передаточная каретка 34 прибыла на адресную позицию 7 продольного ходового пути 16 транспортной ветви 14 и ее грузовая платформа 35 полностью расположилась под порожней тележкой 17, оператор воздействует на кнопку "СТОП" 88, в результате чего на ее выходе появляется сигнал, который поступает на пятый вход блока 90 и вход элемента НЕ 115. Наличие сигнала на входе последнего вызывает исчезновение сигнала на его выходе, выходе элемента И 109, третьем выходе блока 90 и первом входе привода 65, в результате чего прекращается вращение колес 66 и передаточная каретка 34 останавливается в необходимом месте.
Оператор, убедившись в правильном взаимном расположении порожней тележки 17 и передаточной каретки 34, воздействует на кнопку "ВВЕРХ", в результате чего на ее выходе появляется сигнал, который поступает на второй вход блока 90 и через первый вход элемента ИЛИ 112 на пятый вход элемента И 108. Наличие сигналов одновременно на всех входах элемента И 108 вызывает появление сигнала на его выходе, втором входе элемента ИЛИ 112 (запоминается), входе элемента НЕ 121 (запрет противовключения), втором выходе блока 90 и втором входе привода 68, в результате чего посредством механизма 69 осуществляется подъем грузовой платформы 35. Последняя по ходу движения приподнимает порожнюю тележку 17 и в крайнем верхнем положении посредством механизма 69 подъема взаимодействует с датчиком 75 ограничения хода "ВВЕРХ", в результате чего на его выходе появляется сигнал, который поступает на восьмой вход блока 90 и вход элемента НЕ 118.
Наличие сигнала на входе элемента НЕ 118 вызывает исчезновение сигнала на его выходе, выходе элемента И 108, втором выходе блока и втором входе привода 68, в результате чего механизм 69 прекращает движение и фиксирует приподнятое положение порожней тележки17. После этого оператор повторно воздействует на кнопку "ВПЕРЕД" 79 и аналогично изложенному осуществляется включение привода 68, после чего передаточная каретка 34 начинает перемещать порожнюю тележку 17 на адресную позицию 6 продольного ходового пути 15 транспортной ветви. При прибытии передаточной каретки 34 в пункт назначения ее датчик 73 рабочего хода вступает во взаимодействие с тупиковым упором 98, в результате чего на его выходе появляется сигнал, который поступает на седьмой вход блока 90 и вход элемента НЕ 117. Наличие сигнала на входе последнего вызывает исчезновение сигнала на его выходе, выходе элемента И 109, третьем выходе блока 90 и первом входе привода 68, в результате чего передаточная каретка 34 останавливается в необходимом месте.
Передаточная каретка 34 после останова с учетом инерционного выбега вступает во взаимодействие непосредственно с тупиковым упором 98, благодаря которому она точно фиксируется напротив продольного ходового пути 15 транспортной ветви 13.
Оператор, убедившись в правильном расположении передаточной каретки 34, воздействует на кнопку "ВНИЗ", в результате чего на ее выходе появляется сигнал, который поступает на первый вход блока и через первый вход элемента ИЛИ 111 на пятый вход элемента И 107.
Наличие сигналов одновременно на всех входах элемента И 107 вызывает появление сигнала на его выходе, втором входе элемента ИЛИ 111 (запоминается), входе элемента НЕ 120, первом выходе блока 99 и первом входе привода 68, в результате чего механизм 69 осуществляет перемещение вниз грузовой платформы 35 и порожней тележки 17.
Механизм 69 по ходу движения в промежуточном положении колеса 55 тележки 17 устанавливается на продольные рельсовые ходовые пути 16 транспортной ветви 13 и в крайнем положении вступает во взаимодействие с датчиком 77 ограничения хода вниз, в результате чего на его выходе появляется сигнал, который поступает на девятый вход блока 99 и вход элемента НЕ 119. Наличие сигнала на входе элемента НЕ 119 вызывает исчезновение сигнала на его выходе, выходе элемента И 107, первом выходе блока 90 и первом входе привода 68, в результате чего прекращается перемещение механизма 69 и грузовая платформа 35 останавливается в крайнем нижнем исходном положении.
Оператор, убедившись в правильном и надежном расположении тележки 17 на продольных рельсовых ходовых путях 16 транспортной ветви 14, воздействует на кнопку "НАЗАД" 81, в результате чего на ее выходе появляется сигнал, который поступает на четвертый вход блока 90 и через первый вход элемента ИЛИ 114 на пятый вход элемента И 110. Наличие сигналов одновременно на всех входах элемента И 110 вызывает появление сигнала на его выходе, втором входе элемента ИЛИ 114 (запоминается), входе элемента НЕ 123, четвертом выходе блока 90 и втором входе привода 68, в результате чего колеса 66 начинают вращаться, а передаточная каретка 34 начинает возвращаться назад по поперечному ходовому пути 32.
После убытия передаточной каретки 34 с адресной позиции 6 сюда же начинается доставка с заготовительного участка крупногабаритных металлоконструкций и расположение их на порожнюю тележку 17.
При прибытии передаточной каретки 34 в пункт назначения датчик 71 исходного положения вступает во взаимодействие с тупиковым упором 96, в результате чего на его выходе появляется сигнал, который поступает на второй вход элемента И 105, шестой вход блока 90 и выход элемента НЕ 116.
Наличие сигнала на входе элемента НЕ 116 вызывает исчезновение сигнала на его выходе, выходе элемента И 110, четвертом выходе блока 90 и втором входе привода 68, в результате чего прекращается вращение колес 66 и передаточная каретка 34 останавливается в исходном положении. С выхода элемента И 105 поступает сигнал на пятые входы блоков 99 и 100, разрешающий включение приводов 39 и 40 тяговых органов обеих транспортных ветвей после завершения разгрузки прибывшей на адресную позицию 1 склада готовой продукции тележки 17 с полностью обработанными согласно технологии крупногабаритными металлоконструкциями 133.
Оператор передаточной каретки 33, убедившись в окончательной разгрузке тележки 17 на адресной позиции 1 склада готовой продукции и готовности поперечного ходового пути 31, воздействует на кнопку "ВПЕРЕД" 78, в результате чего на ее выходе появляется сигнал, который поступает на третий вход блока 89, в результате чего аналогично изложенному происходит включение привода 64, начинается вращение колес 66 и перемещение передаточной каретки 33 по поперечному ходовому пути в сторону разгруженной тележки. После прибытия передаточной каретки 33 на адресную позицию 1 продольного ходового пути 15 транспортной ветви 13 и расположения грузовой платформы 35 полностью под порожней тележкой 17 оператор воздействует на кнопку "СТОП" 87 и аналогично изложенному происходит останов.
Оператор, убедившись в правильном взаимном расположении порожней тележки 17 и передаточной каретки 33, воздействует на кнопку "ВВЕРХ" 83, в результате чего на ее выходе появляется сигнал, который поступает на второй вход блока 89, в результате чего аналогично изложенному происходит включение привода 68, механизм 69 начинает перемещать вверх грузовую платформу 35 и по ходу движения приподнимает порожнюю тележку 17. При завершении подъема порожней тележки 17 механизм 69 вступает во взаимодействие с датчиком 74, который дает команду на отключение привода 67 и прекращение перемещения грузовой платформы 35. После этого оператор повторно воздействует на кнопку "ВПЕРЕД" 78 и дает команду на перемещение передаточной каретки 33 и порожней тележки 17 на адресную позицию 12 продольного ходового пути 16 транспортной ветви 14. При прибытии передаточной каретки 33 в пункт назначения ее датчик 72 рабочего хода вступает во взаимодействие с тупиковым упором 97, в результате чего на его выходе появляется сигнал, который поступает на седьмой вход блока 89, и аналогично изложенному происходит отключение привода 64 и останов в необходимом месте. Передаточная каретка 33 после останова с учетом инерционного выбега вступает во взаимодействие непосредственно с тупиковым упором 97, благодаря которому она точно фиксируется напротив продольного ходового пути 15 транспортной ветви 13. Оператор, убедившись в правильном расположении передаточной каретки, воздействует на кнопку "ВНИЗ" 85, в результате чего на ее выходе появляется сигнал, который поступает на первый вход блока 89 и аналогично изложенному происходит включение привода 67 и перемещение вниз грузовой платформы 35 и порожней тележки 17.
По ходу перемещения грузовой платформы 35 в промежуточном положении колеса 55 тележки 17 устанавливаются на продольных рельсовых ходовых путях 15 транспортной ветви 13 и в крайнем положении вступает во взаимодействие с датчиком 76 ограничения хода вниз, в результате чего на его выходе появляется сигнал, который поступает на девятый вход блока 89 и аналогично изложенному происходит отключение привода 67 и останов грузовой платформы 35 в исходном положении.
Оператор, убедившись в правильном и надежном расположении тележки 17 на продольных рельсовых путях 15 транспортной ветви 13, воздействует на кнопку "НАЗАД" 80, в результате чего на ее выходе появляется сигнал, который поступает на четвертый вход блока 89 и аналогично изложенному происходит включение привода 64 и возврат передаточной каретки 33 в исходное положение.
При прибытии передаточной каретки 33 в пункт назначения ее датчик 70 исходного положения вступает во взаимодействие с тупиковым упором 95, в результате чего на выходе датчика 70 появляется сигнал, который поступает на шестой вход блока 89 и аналогично изложенному происходит отключение привода 64 и останов в необходимом месте. На этом завершается один цикл грузопотока на горизонтально замкнутом тележечном конвейере и тяговые цепные органы 29 и 30 подготовлены к осуществлению следующего шагового перемещения. Запуск следующего цикла грузопотока на горизонтально замкнутом тележечном конвейере осуществляется аналогично изложенному после завершения разгрузки тележки 17 на адресной позиции 1 склада готовой продукции и загрузки тележки 17 на адресной позиции 6 заготовительного участка, а также после завершения совмещенных по времени технологических операций по реализации грунтовки металлоконструкций и предварительной сушки на адресных позициях 5 и 4, окраски металлоконструкций и окончательной сушки на адресных позициях 3 и 2, т. е. за время погрузочно-разгрузочных операций одновременно на других позициях осуществляется грунтовка, предварительная сушка, окраска и окончательная сушка последовательно проходящих через эти позиции металлоконструкций, благодаря чему снижаются потери времени и повышается производительность.
Таким образом, предлагаемый горизонтально замкнутый тележечный конвейер выгодно отличается от аналогичных известных конвейеров, так как благодаря предложенному конструктивному выполнению толкателей и определенному размещению их на тяговых цепных органах относительно оригинально расположенных адресных позиций, а также благодаря применению предложенной системы контроля положений исполнительных механизмов и системы мгновенного реагирования при отклонениях от нормы удается обеспечить реверсивное перемещение тяговых цепных органов и шаговое перемещение тележек в одну сторону, избежать больших пусковых нагрузок, уменьшить мощность приводов и значительно снизить энергопотребление за счет полезного использования массы и инерционных сил ранее запущенных предыдущих тележек, а также удается исключить случаи столкновения передаточных кареток с тележками, повысить надежность в работе и увеличить долговечность, что в конечном итоге способствует повышению производительности.
Заявляемый горизонтально замкнутый тележечный конвейер может найти широкое применение в различных отраслях народного хозяйства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия сушки керамических изделий | 1979 |
|
SU856817A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| Устройство для синхронной заливки форм на литейных конвейерах | 1982 |
|
SU1071362A1 |
| Подвесной толкающий конвейер-склад | 1960 |
|
SU135824A1 |
| УСТРОЙСТВО для СОРТИРОВКИ ДЛИННОМЕРНЫХ ПРЕДМЕТОВ по ВЕСУ | 1973 |
|
SU392353A1 |
| Горизонтально-замкнутый конвейер | 1977 |
|
SU685576A1 |
| Горизонтально-замкнутый тележный конвейер | 1975 |
|
SU569489A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |

Использование: в промышленном транспорте, в частности на участках окраски и сушки крупногабаритных изделий. Сущность изобретения: предложенное выполнение толкателей и определенное размещение их на тяговых цепных органах относительно оригинально расположенных адресных позиций, а также применение системы контроля положений исполнительных механизмов и системы мгновенного реагирования при отклонениях от нормы позволяет обеспечить перемещение тяговых цепных органов и шаговое поочередное перемещение тележек в одну сторону, избежать больших пусковых нагрузок, уменьшить мощность приводов, значительно снизить энергопотребление, исключить случаи столкновения передаточных кареток с тележками, повысить надежность в работе и увеличить долговечность. 3 з. п. ф-лы, 13 ил.
