1
Изобретение относится к устройствам управления строительными машинами, например экскаваторами и кранами с механическим приводом и пневматическим или гидравлическим сервоуправлением, а также с гидроприводом по кабелю или по радио, и предназначено для использования в опасных условиях работы, когда непосредственное управление машиной нежелательно.
Известно устройство управления строительной машиной, например универсальным экскаватором Э-1001, Е и ЭО-5111 АС, схема управления . которого состоит из компрессора, влагоотделителя, рукоятей управления, включающих дифференциальные золотники, которые подают открытый .воздух в пневмоцилиндры и пневмокамеры тормозов и муфт 1 .
Это устройство управления обеспечивает плавное, блокированное управление механизмами экскаватора, но не позволяет управлять машиной дистанционно по кабелю или по радио, а следовательно, не обеспечивает безопасности оператора в опасных условиях.
Известно устройство дистанционного управления строительной машиной, состояш,ее из пульта управления с установленными на нем тумблерами, кнопками и рукоятями управления, а также из электропневматических золотников, подающих сжатый воздух в линии управления исполнительными элементами поворота, подъёма .и опускания рабочего органа 2.
Это управление позволяет yIipaвляfь строительной машиной дистанционно, но не обеспечивает плавности включения механизмов и регулирование скорости, что приводит к быстрому износу тормозов и муфт, а также рабочего оборудования из-за дополнительных динамических нагрузок, поэтому может быть использовано только на механизмах с малыми скоростями при небольшом количестве переключений или на машинах малой мощности. В итоге это делает этот вид управления неприемлемым почти на всех строительных машинах. Цель изобретения - обеспечение безопасности оператора-машиниста за счет удаления машиниста из зоны действия машины.
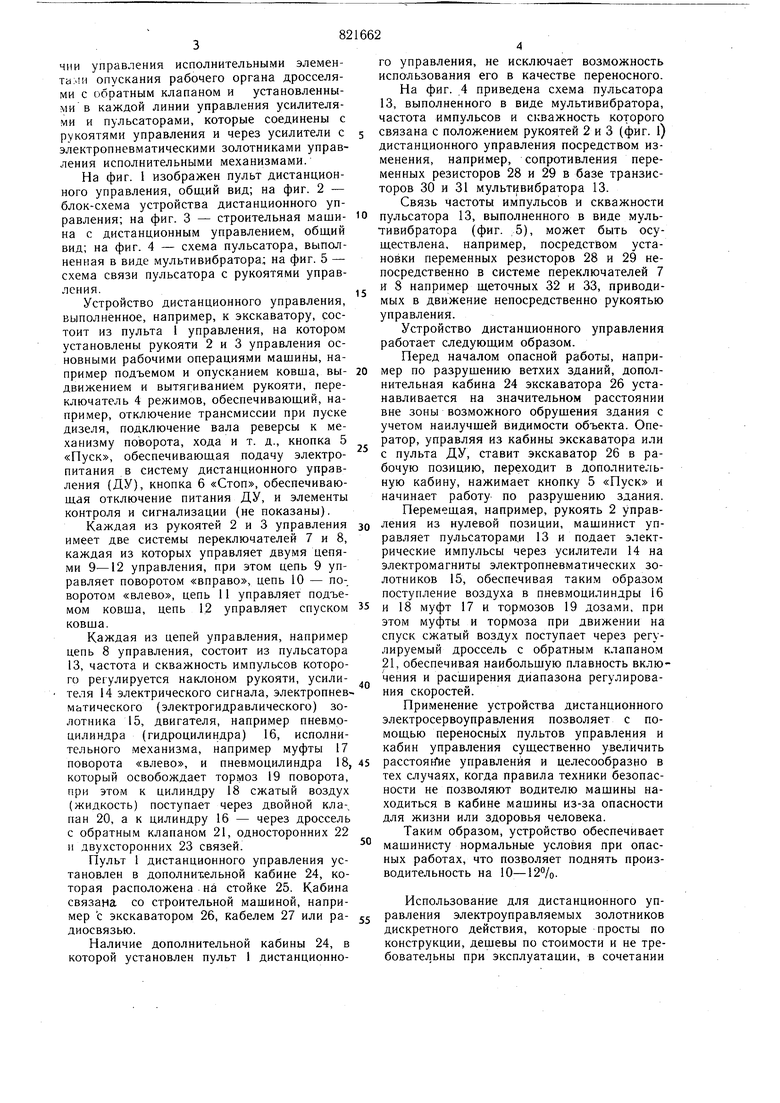
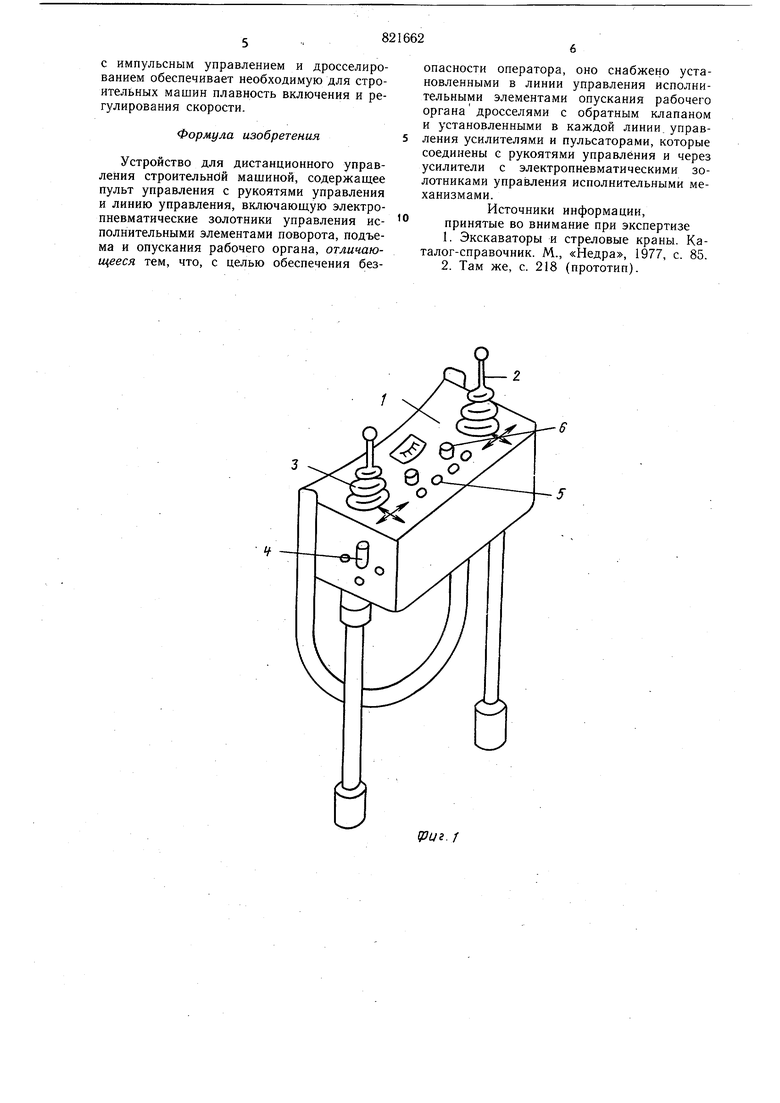
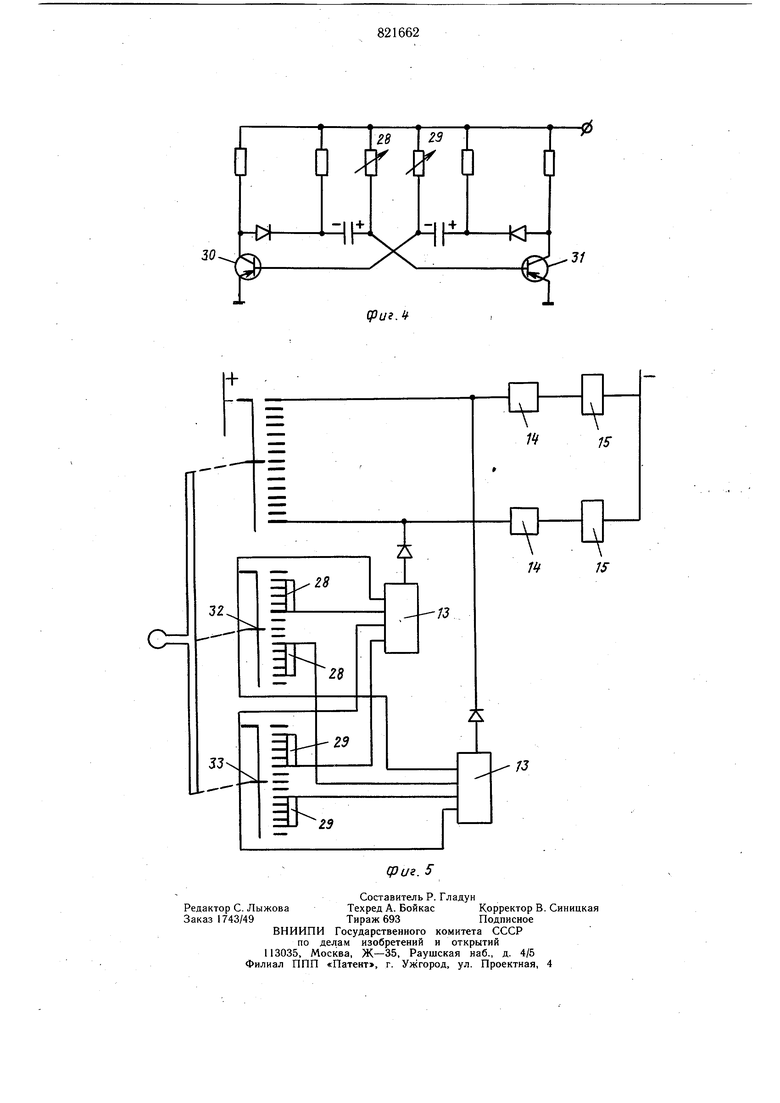
Поставленная цель достигается тем, что устройство снабжено установленными в лиНИИ управления исполнительными элементами опускания рабочего органа дросселями с обратным клапаном и установленными в каждой линии управления усилителями и пульсаторами, которые соединены с рукоятями управления и через усилители с электропневматическими золотниками управления исполнительными механизмами. На фиг. 1 изображен пульт дистанционного управления, общий вид; на фиг. 2 - блок-схема устройства дистанционного уп равления; на фиг. 3 - строительная машина с дистанционным управлением, общий вид; на фиг. 4 - схема пульсатора, выполненная в виде мультивибратора; на фиг, 5 - схема связи пульсатора с рукоятями управУстройство дистанционного управления, выполненное, например, к экскаватору, состоит из пульта 1 управления, на котором установлены рукояти 2 и 3 управления основными рабочими операциями мащины, например подъемом и опусканием ковша, выдвижением и вытягиванием рукояти, переключатель 4 режимов, обеспечивающий, например, отключение трансмиссии при пуске дизеля, подключение вала реверсы к механизму поворота, хода и т. д., кнопка 5 «Пуск, обеспечивающая подачу электропитания в систему дистанционного управления (ДУ), кнопка 6 «Стоп, обеспечивающая отключение питания ДУ, и элементы контроля и сигнализации (не показаны). Каждая из рукоятей 2 и 3 управления имеет две системы переключателей 7 и 8, каждая из которых управляет двумя цепями 9-12 управления, при этом цепь 9 управляет поворотом «вправо, цепь 10 - по-. воротом «влево, цепь 11 управляет подъемом ковша, цепь 12 управляет спуском ковша. Каждая из цепей управления, например цепь 8 управления, состоит из пульсатора 13, частота и скважность импульсов которого регулируется наклоном рукояти, усилителя 14 электрического сигнала, электропневматического (электрогидравлического) золотника 15, двигателя, например пневмрцилиндра (гидроцилиндра) 16, исполнительного механизма, например муфты 17 поворота «влево, и пневмоцилиндра 18, который освобождает тормоз 19 поворота, при этом к цилиндру 18 сжатый воздух (жидкость) поступает через двойной кла-. пан 20, а к цилиндру 16 - через дроссель с обратным клапаном 21, односторонних 22 и двухсторонних 23 связей. Пульт 1 дистанционного управления установлен в дополнит,ельной кабине 24, которая расположена на стойке 25. Кабина связана со строительной машиной, например с экскаватором 26, кабелем 27 или радиосвязью. Наличие дополнительной кабины 24, в которой установлен пульт 1 дистанционного управления, не исключает возможность использования его в качестве переносного. На фиг. 4 приведена схема пульсатора 13, выполненного в виде мультивибратора, частота импульсов и скважность которого связана с положением рукоятей 2 и 3 (фиг. l) дистанционного управления посредством изменения, например, сопротивления переменных резисторов 28 и 29 в базе транзисторов 30 и 31 мультивибратора 13. Связь частоты импульсов и скважности пульсатора 13, выполненного в виде мультивибратора (фиг. 5), может быть осуществлена, например, посредст1вом установки переменных резисторов 28 и 29 непосредственно в системе переключателей 7 и 8 например щеточных 32 и 33, приводимых в движение непосредственно рукоятью управления. Устройство дистанционного управления работает следующим образом. Перед началом опасной работы, например по разрущению ветхих зданий, дополнительная кабина 24 экскаватора 26 устанавливается на значительном расстоянии вне зоны возможного обрушения здания с учетом наилучшей видимости объекта. Оператор, управляя из кабины экскаватора или с пульта ДУ, ставит экскаватор 26 в рабочую позицию, переходит в дополнительную кабину, нажимает кнопку 5 «Пуск и начинает работу по разрушению здания. Перемещая, например, рукоять 2 управления из нулевой позиции, машинист управляет пульсаторам 13 и подает электрические импульсы через усилители 14 на электромагниты электропневматических золотников 15, обеспечивая таким образом поступление воздуха в пневмоцилиндры 16 и 18 муфт 17 и тормозов 19 дозами, при этом муфты и тормоза при движении на спуск сжатый воздух поступает через регулируемый дроссель с обратным клапаном 21, обеспечивая наибольшую плавность включения и расширения диапазона регулирования скоростей, Применение устройства дистанционного электросервоуправления позволяет с помощью переноснь1х пультов управления и кабин управления существенно увеличить расстояН11е управления и целесообразно в тех случаях, когда правила техники безопасности не позволяют водителю машины находиться в кабине машины из-за опасности для жизни или здоровья человека. Таким образом, устройство обеспечивает машинисту нормальные условия при опасных работах, что позволяет поднять производительность на 10 -12/о. Использование для дистанционного управления электроуправляемых золотников дискретного действия, которые просты по конструкции, дешевы по стоимости и не требовательны при эксплуатации, в сочетании
с импульсным управлением и дросселированием обеспечивает необходимую для строительных машин плавность включения и регулирования скорости.
Формула изобретения
Устройство для дистанционного управления строительнйй машиной, содержаш;ее пульт управления с рукоятями управления и линию управления, включаюш,ую электропневматические золотники управления исполнительными элементами поворота, подъема и опускания рабочего органа, отличающееся тем, что, с целью обеспечения безопасности оператора, оно снабжено установленными в линии управления исполнительными элементами опускания рабочего органа дросселями с обратным клапаном и установленными в каждой линии, управления усилителями и пульсаторами, которые соединены с рукоятями управления и через усилители с электропневматическими золотниками управления исполнительными механизмами.
Источники информации, принятые во внимание при экспертизе
1.Экскаваторы и стреловые краны. Каталог-справочник. М., «Недра, 1977, с. 85.
2.Там же, с. 218 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления гидроприводом строительной машины | 1981 |
|
SU1044739A1 |
| Устройство управления лебедкой | 1978 |
|
SU765198A1 |
| Кран машиниста железнодорожного транспортного средства | 2016 |
|
RU2635732C1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Электрическое устройство для дистанционного управления | 1972 |
|
SU449873A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |
VUz.r
Z223 2/
чру
I
ГГв П
я
Iff
IS
28
Г
32,
-13
