1
Изобретение относится к грузоподъемным механизмам, а именно к устройствам управления лебедкой, например, экскаваторов.
Известно устройство управления ле- 5 бедкой, содержащее источник питания, цилиндры, муфты включения барабана и тормоза и рукоять, управляющую дифференциальными золотниками, связанными трубопроводами с цилиндром муфты 10 включения барабана, через перекидной клапан с цилиндром тормоза и источником питания U и 2.
Однако такие лебедки не обеспечивают возможности управления -машиной 5 на значительном расстоянии по кабелю или по радио, что необходима при проведении опасных работ на строительстве, например, при разрушении ветхих зданий,- при прокладке трубо- 20 проводов через реки и т.д.
Целью изобретения является повышение безопасности работы оператора путем обеспечения дистанционного управления.25
Это достигается тем, что устройство снабжено редукционными клапанами с управлякхцими электромагнитами, датчиками пропорционального регулирования и дополнительной рукоятью, 30
управлякяцей упомянутыми датчикгили, электрически связанными с электромагнитами -редукционных клапанов, а каждый дифференциальный золотник снабжен камерой управления с подпруж y eнным поршнем, соединенной трубопроводом с одним из редукционных клапанов.
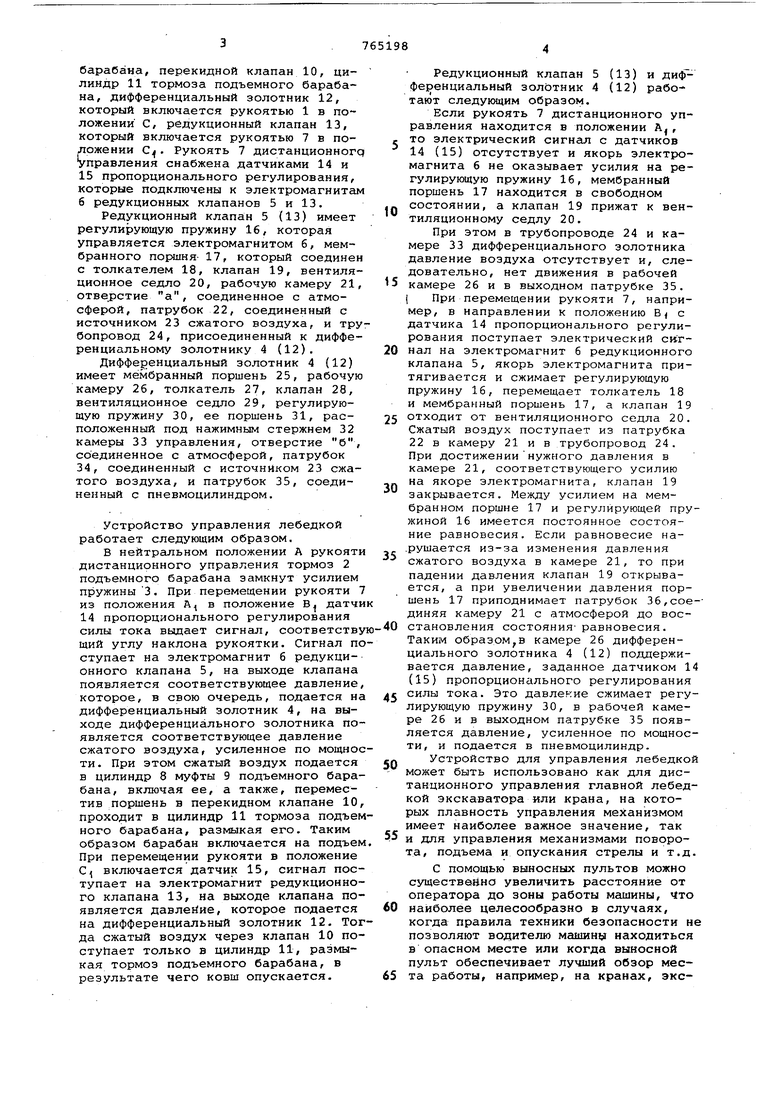
На фиг. 1 дана схема устройства управления подъемной лебедкой экскаватора; на фиг. 2 схематично изображены редукционный клапан, с электромагнитом и дифференциальный клапан с камерой воздушного управления, разрез .
Устройство управления лебедкой содержит рукоять 1 управления, расположенную в кабине экскаватора, тормоз 2 подъемного барабана, который замкнутусилием пружины 3, дифференциальный золотник 4, который включается при переводе рукояти 1 в положение В, редукционный клапан 5, снабжённый управляющим электромагнитом 6, который включается при перемещении дополнительной рукояти 7 управления, расположенной на выносном пульте дистанционного управления (на чёрт, не показан), в положение Щ г цилиндр 8 муфты 9 подъемно го барабана, перекидной клапан 10, цилиндр 11 тормоза подъемного барабана, дифференциальный золотник 12, который включается рукоятью 1 в положении С, редукционный клапан 13, который включается рукоятью 7 в положении С. Рукоять 7 дистанционногр управления снабжена датчиками 14 и 15 пропорционального регулирования, которые подключены к электромагнитам б редукционных клапанов 5 и 13. Редукционный клапа:н 5 (13) имеет регулирующую пружину 16, которая управляется электромагнитом б, мембранного поряиня- 17, который соединен с толкателем 18, клапан 19, вентиляционное седло 20, рабочую камеру 21, отверстие а, соединенное с атмосферой, патрубок 22, соединенный с источником 23 сжатого воздуха, и тру бопровод 24, присоединенный к дифференциальному золотнику 4 (12), Диффе)енциальный золотник 4 (12) имеет мембранный поршень 25, рабочую камеру 26, толкатель 27, клапан 28, вентиляционное седло 29, регулирующую пружину 30, ее поршень 31, расположенный под нажимным стержнем 32 камеры 33 управления, отверстие б, соединенное с атмосферой, патрубок 34, соединенный с источником 23 сжатого воздуха, и патрубок 35, соединенный с пневмоцилиндром. Устройство управления лебедкой работает следующим образом. В нейтральном положении А рукояти дистанционного управления тормоз 2 подъемного барабана замкнут усилием пружины3. При перемещении рукояти 7 из положения А в положение В датчи 14 пропорционального регулирования силы тока выдает сигнал, соответству щий углу наклона рукоятки. Сигнал по ступает на электромагнит б редукционного клапана 5, на выходе клапана появляется соответствующее давление которое, в свою очередь, подается на дифференциальный золотник 4, на выходе дифференциального золотника появляется соответствующее давление сжатого воздуха, усиленное по мощнос ти. При этом сжатый воздух подается в цилиндр 8 муфты 9 подъемного барабана, включая ее, а также, переместив поршень в перекидном клапане 10 проходит в цилиндр 11 тормоза подъем ного барабана, размыкая его. Таким образом барабан включается на подъем При перемещении рукояти в положение С включается датчик 15, сигнал поступает на электромагнит редукционного клапана 13, на выходе клапана появляется давление, которое подается на дифференциальный золотник 12. Тог да сжатый воздух через клапан 10 поступает только в цилиндр 11, размыкая тормоз подъемного барабана, в результате чего ковш опускается. Редукционный клапан 5 (13) и дифференциальный золотник 4 (12) работают следующим образом. Если рукоять 7 дистанционного управления находится в положении А, то электрический сигнал с датчиков 14 (15) отсутствует и якорь электромагнита 6 не оказывает усилия на регулирующую пружину 16, мембранный поршень 17 находится в свободном состоянии, а клапан 19 прижат к вентиляционному седлу 20. При этом в трубопроводе 24 и камере 33 дифференциального золотника давление воздуха отсутствует и, следовательно, нет движения в рабочей камере 26 и в выходном патрубке 35. i При перемещении рукояти 7, например, в направлении к положению В с датчика 14 пропорционального регулирования поступает электрический си:гнал на электромагнит б редукционного клапана 5, якорь электромагнита притягивается и сжимает регулирующую пружину 16, перемещает толкатель 18 и мембранный поршень 17, а клапан 19 отходит от вентиляционного седла 20. Сжатый воздух поступает из патрубка 22 в камеру 21 и в трубопровод 24. При достижениинужного давления в камере 21, соответствующего усилию на якоре электромагнита, клапан 19 закрывается. Между усилием на мембранном поршне 17 и регулирующей пружиной 16 имеется постоянное состояние равновесия. Если равновесие на.рушается из-за изменения давления сжатого воздуха в камере 21, то при падении давления клапан 19 открывается, а при увеличении давления поршень 17 приподнимает патрубок 36,соединяя камеру 21 с атмосферой до восстановления состояния- равновесия. Таким образом,в камере 26 дифференциального золотника 4 (12) поддерживается давление, заданное датчиком 14 (15) пропорционального регулирования силы тока. Это давлекие сжимает регулирующую пружину 30, в рабочей камере 26 и в выходном патрубке 35 появляется давление, усиленное по мощности, и подается в пневмоцилиндр. Устройство для управления лебедкой может быть использовано как для дистанционного управления главной лебедкой экскаватора или крана, на которых плавность управления механизмом имеет наиболее важное значение, так и для управления механизмами поворота, подъема и опускания стрелы и т.д. С помощью выносных пультов можно существейно увеличить расстояние от оператора до зоны работы машины, что наиболее целесообразно в случаях, когда правила техники безопасности не позволяют водителю машину находиться в опасном месте или когда выносной пульт обеспечивает лучший обзор места работы, например, на кранах, экс

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1523511A1 |
| Рабочее оборудование одноковшового экскаватора | 1972 |
|
SU446590A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕБЕДКОЙ С НОРМАЛЬНО ЗАКРЫТЫМ ТОРМОЗОМ ЭКСКАВАТОРА | 1969 |
|
SU247487A1 |
| Устройство для управления рукоятью экскаватора | 1980 |
|
SU977624A1 |
| УСТРОЙСТВО ПНЕВМАТИЧЕСКОГО УПРАВЛЕНИЯ ГЛАВНОЙ ЛЕБЕДКОЙ ЭКСКАВАТОРА | 1969 |
|
SU240550A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РУКОЯТЬЮ ЭКСКАВАТОРА | 1971 |
|
SU295847A1 |
| Устройство для дистанционного (на расстоянии) управления буровым станком | 1933 |
|
SU43850A1 |
| ВПТБ^ц^-^пьГПТПЦ0:>&-.S:;;.( i Ь «J i | 1973 |
|
SU397603A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU242051A1 |
| Тормозной привод тягача | 1987 |
|
SU1518172A1 |
