3. Системе по пп. I.H 2, о л и чающаяся тем, что, с цепью обеопечения мапой скорости, она поспецоватепьно соединенными эпектро
гкцраашлческкми кпе-п&намн и регушфув мыми HpcccensTMH, поин люченными к канс ц-ой ПИНИЙ управпешш испопнитедььь.:. механизмами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управленияСТРОиТЕльНОй МАшиНОй | 1979 |
|
SU821662A1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| Многоканальный источник питания с защитой | 1977 |
|
SU624224A1 |
| Система управления стреловым краном | 1974 |
|
SU520318A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для извлечения корня | 1976 |
|
SU624237A1 |
| Система сервоуправления гидроприводом экскаватора | 1977 |
|
SU763539A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |
| Устройство управления лебедкой | 1978 |
|
SU765198A1 |
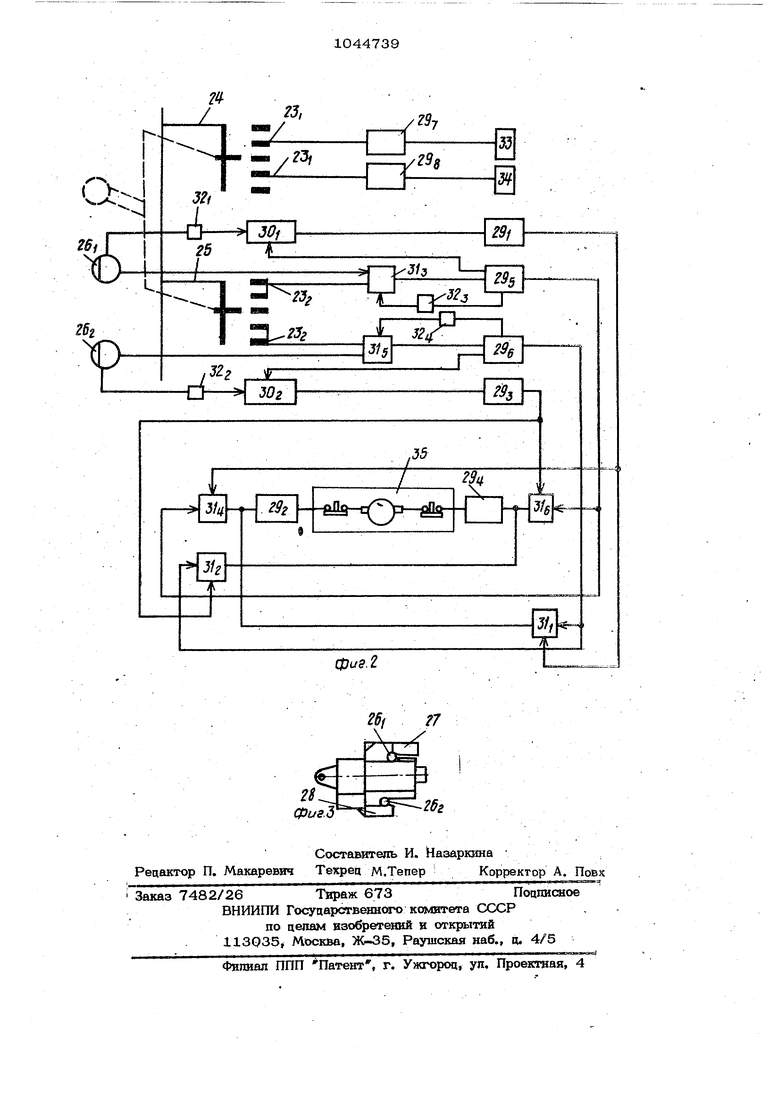

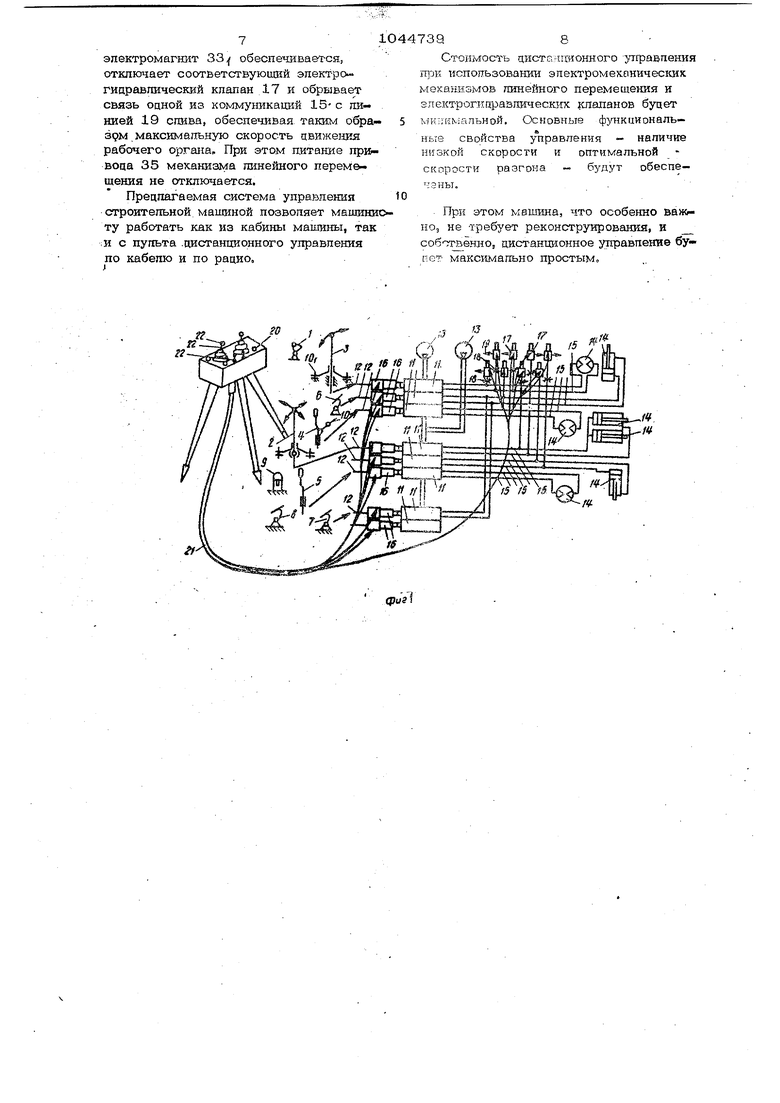
Изобретение относится, к снстеуам цистантщонного улравпения С1роите1гьны MIS маишнами с гицропривоцом. известно оистанционное утфавпениз строитепъными машинами с гицропрквоцо в котором используется цроссепьный игш объемный способ регулирования скорости. 1 . Эти способы регуггарования требуют обеспечегшя большой чистоты маспа цо 10 кп., постоянства его вязкости & пре цепак 7-20 оСт, что на строительных машинах, работаюшик в очень тяжелых и разнообразных -условиях, обеспечить практически невозмо}кно. Кроме того, аппаратура, в которой испопьаует-сл объемный и црсюсельный способ рования, кмее большую стокмооль, Известно цистанШ1О1шое управл1н 5е, в котором для управления испопьэую ся цояопнитегеьные (управпяющие) гиаро игш пневмоШ1линцры, непосредственно подсойциненшэ1е к рукоятям управпешш .мелшны 23 . 3 этом сг1 чае на базовую машлну устанавливается такое количество упраь ляющих элементов, цилинаров и коммуникаций, какое-Имеет сама базовая маши ца. До.сопнктегпьное количество аппаратуры 5 стйнавгй4вать на машину труцно и цоротч.-, особенно, если машина малой мощности, как, например, попукубовый экскаватор. Известна система управления С7рои тельной машиной, например, гидравгшчео ivUM экскаватором включающая pyKosmcai и лецали управления, находящиеся в кабв не, которые с помощью тяг аиста щион но подсоецинены к гидравлическим раопредештепям, которые в свою очередь гидрокоммуникациями поцключены| к испо -гтательным механизмам, выполненным в вицэ гицроцигашаров и гицромоторов Нецоотатком этого управлений smjiH&T Си отсутствие возможности управлять мб шиной на аиачлтепъном расгто 1:т кабеггю или по рап.ио, когпа л КЗ кабины опасно япя .v, зШ шгювек.а,. например,: пр -jf разрушению зцаний или pe fOHCTDv-i i гороцоЁ, при погрузке горячих и пыгхя Ш К. мвтериапоВ; спя у леньшенчк у-томпл --мости яр;: напаг-ши вибрации, трясгш я значительных ускорений на рабочем мео« те машиниста, в. также при автоматизашш процессов по управлению цпя облегче1шя и увепичевжя произвоаитекьнсюти машины. Наиболее бпиэкг м по технической суан кости к прецгеатяе ЮА/ является ус:7рсйс зо цгш 0.кст1Э ишонногГ) управленкя CTpui-т-егтьпон маппгной; сояео}к ;щее щть1 Лй--Wdim(fr& с р ;-й-1л;йй; уйравпекня. по1ысшо чекный к miHHHivi управгаекйя йс.аипш-;4й}-й:. нымн механлз.М .ми поворота подъема j опускания рабочего органе, вк:пючй1о:ч;е 5 зопотникк упреэненкя нсйорлнге тъяь5..;л меканизмам упрйвгееяия, соединенные тягами с рукоятками, В Этом устройсГйе все механиз /{ы снабжены яетемй ми переключатепеЙ к&ж.тя из soropiss управляет двумя аепуми улравпешк;.; и снабжена цопоянитепьно усилитетгдуйг а пульсаторами |J4J Устройство такого типа спожнОз -гак 1ШК состоит из большого копкчесрва эк& ментов и узлов,, Цепь изобре1ешя - упрощение снст-е мы дистанционного управления, Поставленная цель достигается тем, что в системе дистанционного управлеамя гидроприводом строительной машины, со держащей пупьт машиниста с рукоятт-ш управления, подключенный к линиям ynpasf нация испошштельными механизмами по-, ворота, посгьема и опускания рабочего органа, включающими золотники управле. 1ШЯ испопнитешзными механизмами, со& дашенньши тягами с рукоятями каждая датгшя атравгсекйя цопо 5:г-ш:т8 1ьно снабжена узлом управлешш, paaMemsimbUvi в яуггьте MaiUiiKHCTa, vi встроеннь ; a тегу j,ie caKii3Mo;vi кнпойгг гс nspsi.- miiisrfj o приводом и цвугуш цатчрками попожекия, поаключенкь мй к узл, упрайьиэнмя-, При этом .1::ый yaer:. управпекия выполнен & зигб эпеиентов И, четырех эпеыентов НЕ, эпементов или и восьми усипителей, причем из цатч1 ков мекащтзма гтнейного; кереыещешля поскацоватегшно соециненн ;: ; кфвке згшмент НЕ, .эле мект И„ зсйго теп-Ъ., элемент ИЛИ и втоV :й усагк вяь поцкшочен к ооному из , ;iv-:;jtTo ГПйопя механизма-пикейного Пс .емеп:е :Нм lepsfci выкоа второго --:;:пез п жпоцозатепьно сойцинен а-.еь- :-орь:.;;эГ :е 9н -НЕ;Эп:е /5бНтИдретий усйязггбяь; второй эпвме ;- ИЛИ :с четгвзртый /у:;:игауеяьпой: шс«;&: и. второму нкопу з:1эиаоца мекаш зма гея:-.,ейксго п:ерш-48ще- , второй выхоц первого цатчика , rvo:fsj черэз лоспецоватэпъко соецкненные третий элемент ИЛИ л.ктый усилите чатзерть й зпемеит .к первому uitooy привода через вторс/й усилитель, второй выхоц второго цатчкка через :-:пс-яецовйтепьяо соерйнекчые пйтый s:ie:v eHT ИЛМ отстой усилит--ель и шео -гой. элемеи-т ИЛ- соеаинен с вторым .ajcuaoM йрйьоца ывй,анйа} а ишгейного яеремещенн ifcTBspfaS уск-титепь; :-фК этом к второьл/ вксзу первого эпеме т 5; и поцкшочен второй SHsoa пятого j4:;, ззкоц которого И тр&. й-н вг.:;с..ц ni5.viui-f.; 5сккйтегга поцключены гереэ н ч- гвертый эпементы НЕ c-swf&aTCjBeHHCi к вторьш втсоцам третье s-o Ц riirjcrs эпакентов ИЛИз гретьй :; :ff;rcpbfs GoeaMHSJisi « зыкоцами . 3V-:peKq;c- aTenaj е -вьшоьм первого н трет :го уййшг:®йей еоответетвй . 5ш 5 гзгcpьгs 4 зкоцам ч&гаертого н .шесто .го згеамегггов ИЛИс Кроме о целью обеспй-чегшя мапой сксфос T-Hj снабнсека язцоватегеьно соеа1шеша 1ми эиектрогидра таргескимзг клслакймн и регулируемыми fipCiccsnwjvC-ij i;oiiK«Kr s fEbii n к кажцой -тк-йш удзрааяезшя иоЕошшуе гы1ь;ми мех нлэмам . На фж, 1. аэла цйстсцщконко i-T5 рфавпешы гацро21грнвоаом строитепьsoS мйийшы обишй виа| на фиг. 2 .-эгозсгрическая схемаузпа управления} ка фкго 3 ™ выпапнение метшнизма ли-.; ileijBoro перемещешш СйОг &ыа /этраййетша строительной м& iiiiijiofis KufirivGj-sp sKuitaaaTopoM, состоит на руко-ш-ей 1 5 пеиаией б- 8 упра пения, фикса гор ОБ Э и 1О (при эг;.-; рукоять 1 лрецназиачена цля упрь- -ь идя поаачей топлива, рукоять 2 - цпя управ--n ;шш стрепой и ковшом, рукоять 3 для иравления поворотом платформы, рукояти 4 и 5 - ц ля управлепия цви женин гусешц, Пецагш 6 и 7 прецназначены . ппя у;.фаБпеш я рукоятью рабочего обоРУ1дОва п-5Я; педаль 8 - цля включения тор- МСЗ&.. Фиксатор 8 ггрецназкзлен цля фиксашш платформы при переезаах, фиксатор 10 - цпя фиксашш рукояти 4). 1 ™ 5 И пецали 6 и 7 поцкпю. :-ет-гы к пиниям 5Т1 равпения механизмами г.ойорота, подъема и опускания рабочего спэгана, включaюши /ш золотники 11 управления, ТЕгги 12, золотники 11, в свою оьэзець поцкпюченные к насосной j.v.Ke ЯЗ и к испошштельным механизмам 14 посрецством коммуникаций 15; Б тяги 12 встроены мехашшмьт 16 линей ого перемещения, поцсоециненньге к.. зо потникам 11, и электрогицравпчческие Г ;злана 17 и цроссегш с регулятором 18, поцсоепиненные к гицрокоммуникацИям 15 н к линиям 19 слива. Система дистанционного управления зщротривоцом строительной машины со г.рж1тттакже пупьт 20 машинисте с ка- P;SneM 21 и рукоят5али 22, здесь же расположены узлы управления (не показа ны), Кажаое управляющее цвижение.. рукоятей (фиг. 2) имеет не менее пяти попожеш й 23,2 -среднем положении рукоят1да сигнала на движение йет, в первом положении влево-вправо или зперец-Назад - движение на низкой csopccTiij Е.О втором попожешш влево- вяраво или вперец назад - цвижение га максимапьной скорости) и цвумя пиниями 24 и 25 з ттрйЕгшитш (S4 гшнйя управиения электроа идравлическим клапанном, 25 - линия управлениямеханизмом rшlieйнoгo перемещения). Схема каждого управляющего узла снабжена двумя дискретными датчиками 26 и 2б2 (датчик 261 принимает р-тстне в управлении движением механизма линейного перемещения вперед и возвратом из положения вперед в срец нее положение, датчик 26 - в . нки назад и возвратом из положения назад в среднее положение) и цвумя линейками. 27 и 28. (фиг. 3 (линей ка 27 обеспечивает включение дат шica 26 у| при движении вперец, а линей:ш 28 ™ цатчлка 26 при пйижешга на- вап). Система содержит также усипитепи 29/1 2...,8 - эпементак.га И ЗО,. ИЛИ 32Л gi НЕ кроме того,в схему входят электромагниты 33 и 34 электрогидравпических кпаланов и привод 35 эпект ромеханического механизма 16 пинейного перемещения (фиг., 2). При этом первый выход цатчика 26;j механизма гшнейного перемещения поцключей к первому Jaxoay привоца 35 {механизма линейного перемещения) через поспецоватеиьно соединенные эпементы НЕ 32 И 30, уусилитепь 29, мент ИЛИ 31 i и усипитегсь 29 .„ а выход цатчика 26д мехатжама пи нейного перемещения поцкпючен к второму вхоцу привода 35 через поспецоватепьно соесшненные эпементы / НЕ 32 , И 30 усигштепь 29 , элемент ИЛИ 3 и усипитепь 29 , Второй выход цатчика 25 поцкпючен к первому входу привоца (механизма гшнейного перемещения) 35 через последовательно соединенные эпемент ИЛИ 31 , усигантепь 29j- элемент ИЛИ 31 и усипитепь 29 , а второй зыход датчика 26лПоакпючен к второму вхоцу привода 35 через послецбватеп но соединенные элемент ИЛИ ЗХ - усилитепь 29,элемент ИЛИ 31 и усипи-. тепь 29 л , Кроме тогО( к второму входу Элемента И 30 подключен второй .выход усжпитепя 29t7 , третий выход которого подкдючен через эпемент НЕ 32:4 к эпементу ИЛИ 31... Анапогкчно к второму входу элемента И 30,2 поцкпючен второй выход усилителя 29g , третий выхоц которого подключен через элемент НЕ 32 к элементу ИЛИ 315 . Третья входы элементов ИЛИ 31-} и ИЛИ 31 соединены с выходами переключателя, а выходы усилителей 29 и 295 подключены к второму входу логических элементов ИЛИ и ИЛИ соответственно. Система управления гидроприводом строительной машины работает следук щим образом. Если работы не опасные, то маишнист работает из кабины экскаватора и управн пяёт с помощью рукоятей 1 - 5 и пецалей и 7-,перемещая которые воздействует с . помощью тяг 12 на золотники 11, которые подключают исполнительные механизмы 14 к насосной установке 13. При этом фиксаторы рукояткой должны быть освобождены, пульт дистанционного управления не подключен, электрогидравлические клапаны 17 обесточены, а механизмы 16 линейного перемещения двигаются совместно с- тягами 12. При опасных работах.машинистподсоединяет пульт 2О к системе,рукояти 1-5, управленияунаходящиеся в кабине, устанавшсвает на фиксаторы 10 и lOj, подает питание по кабелю 21 на пульт 20 и управляет рукоятями 22. При перемещении рукояти из среднего положения в первпе рабочий орган имеет низкую скорость, так как часть рабочей ВД1ДКОСТИ через дроссель с регулятором 18 и электрогидравлический клапан 17 пой-, дет спив 19, Во втором положении рукояти скорость рабочего органа будет максимальной,так как электрогицравлический клапан 17 будет закрыт и спива рабочей жидкости не будет.. При дистанционном управлении время разгона рабочего органа,не зависит от скорости перемещения и положения руко ти, а зависит только от скорости механизма линейного перемещения, которая выбрана оптимальной; рабочих скоростей только две - максимальная и минимальная. В остальном работа с пульта маши« ниста не будет отличаТься от работы из кабинь машиниста. Порядок работы элементов схемы (фиг 2) управленияраспределителями следующий, При перемещении рукояти 22 правления из среднего положения в пюбое первое положение питание по одной из линий управления, например, через усилитель 29 , подается на Один из электромагнитов, например, 33, включая соответствующий клапан 17, и подсоединяет одну из коммуникаций 15 к ли- НИИ 19, слива,обеспечивая таким образом малую скорость движения рабочего органа. Одновременно по одной из линий управления питание, например, через эле мент ,--И 31:, усилитель- 29 , элб мент ИЛИ 314 обеспечивает включен нке привода 35 механизма 16 линейного перемещения, который перемещает золотник 11, который подает жидкость от насосной установки 13 к :оответс7ъ. вующему исполнительному механизму 14, При перемещении рукояти 23 управле ния во второе : фиксированное положение электромагнит 33 обеспечивается, отключает соответствующий эпектрогицравлический кдапан 17 и обрывает связь одной из коммуникаций 15- с линией 19 спива, обеспечивая таким образфм, максимальную скорость цви ке1жя рабочего органа. При этом питание привода 35 механизма линейного перемещения не отключается. Предлагаемая система управления строительной машиной позволяет машини ту работать как из кабины машины, так ;И с пульта .дистанционного управления по кабелю и по рацио.
(раз I 7398 Стоимость цистаищонного утфавпения при использовании электромех 1ничес си)с меканизмов линейного перемещения и электрогкцравпичесюпс клапанов будет ми;;кмальной. Основные функциональ- нъге свойсгва управления - наличие низкой скорости и оптимальной скорости разгона - будут обеспеПри этом машина, что особенно ва &ноэ не требует реконструирования, и совтгаённо, цистанчионное управление бупет максимально простым.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Молотков А | |||
| И | |||
| и др | |||
| Объемная гиароперецача строительных, кранов с оистанционным управлением | |||
| Строительное и дорожное машиностроение, ..1977 Ms 7, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
