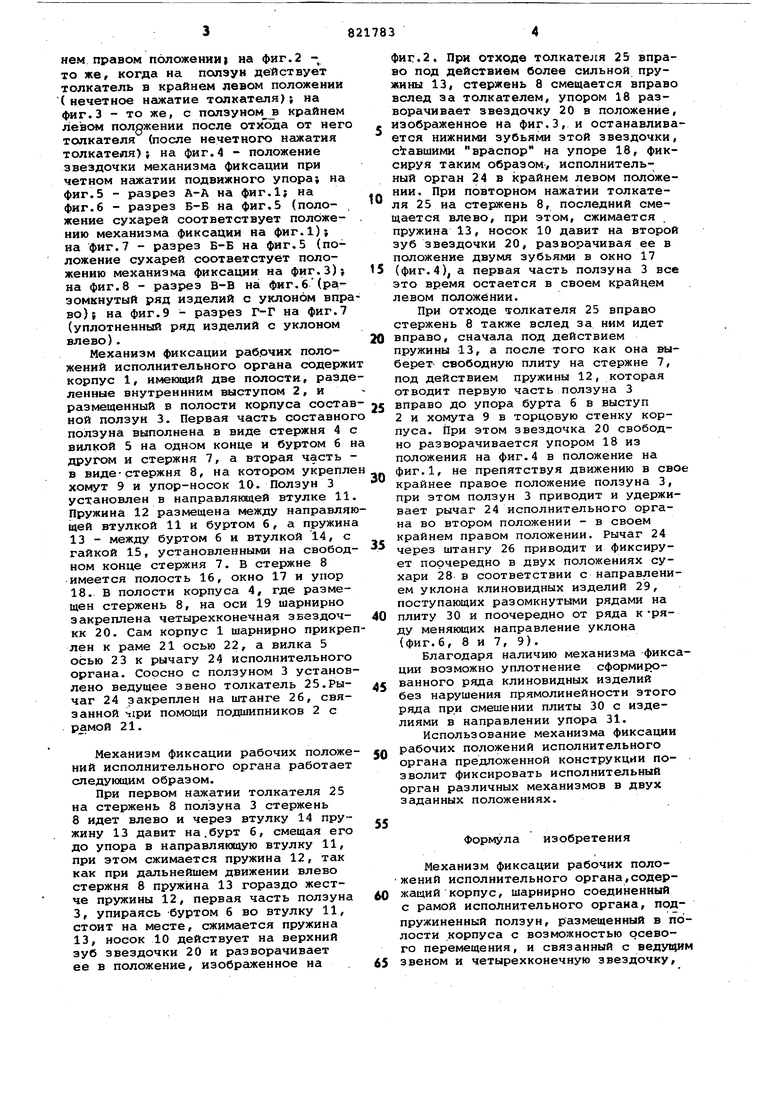
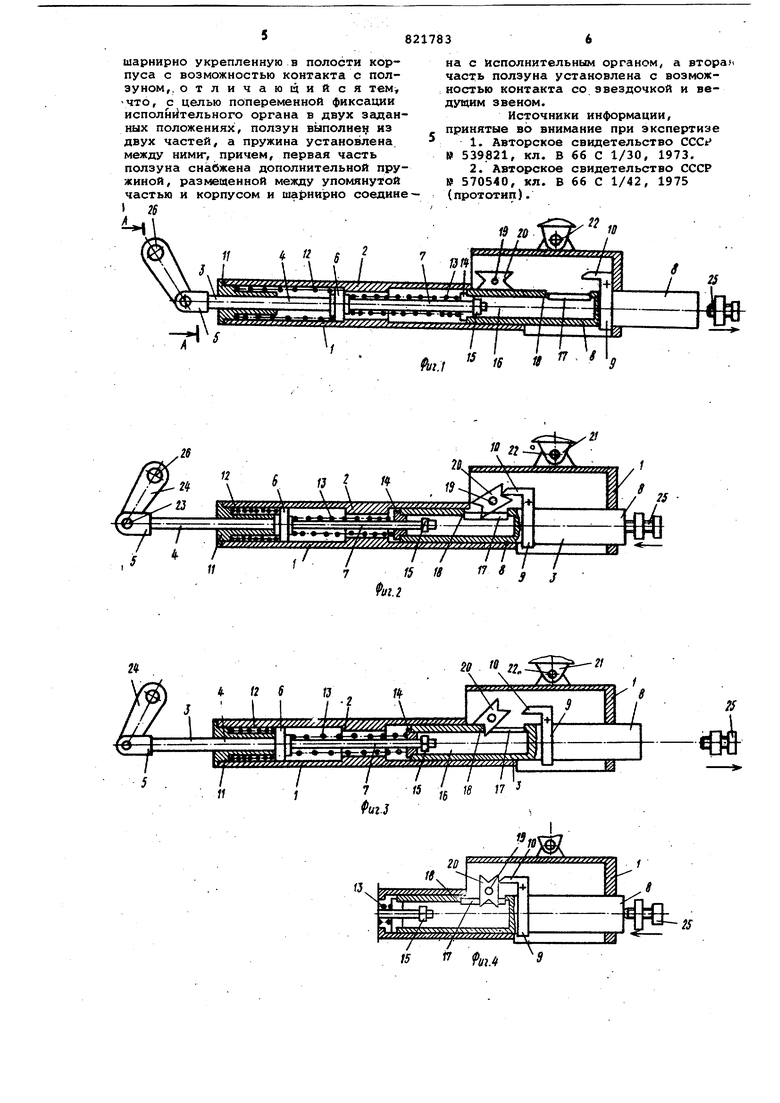
Изобретение относится к устройствам для фиксации исполнительного органа механизма в нужных положениях, в частности для фиксации cs рей в различных рабочих положениях в машинах, формирукядих ряд или сло штучных изделий, имеющих клиновид или пираминальную форму, или фиксации шиберов в двух рабочих- положениях, а также в грузозахватных устройствах. Известен механизм для фиксации исполнительного органа, который со держит размещенный в полости корпуса подвижный ползун, звездочку, шарнирно укрепленную с возможность контакта с вырезами в ползуне и упор-носок, укрепленный в ползуне и связанный с ведущим звеном 1. Недостатком такой конструкции является то, что она фиксирует исполнительный орган только в одном положении. Наиболее близким к предложенному является механизм фиксации рабочих положений исполнительного органа, содержащий корпус, шарнирн соединенный с рамой испопнительног органа, подпружиненный ползун, раз щенный в полости корпуса с возможностью осевого перемещения, и связанный с ведущим звеном и четырехконечную звездочку, шарнирно укрепленную в полости, корпуса с возможностью контакта с ползуном 2. Недостатками этой конструкции являются то, что она фиксирует исполнительный орган только в одном положении, а также тем, что ползун перед фиксацией переходит нужное положение для срабатывания (проворачивание звездочки), а затем возвращается назад в нужное положение . Цель изобретения - попеременная фиксация исполнительного органа в двух заданных положениях. Цель достигается тем, что ползун выполнен из двух частей, а пружина установлена между ними, причем, первая часть ползуна снабжена дополнительной пружиной, размещенной между упомянутой частью и корпусом и шарнирно соединена с исполнительным органом, а вторая часть ползуна установлена с возможностью контакта со звездочкой и ведущим звеном. На фиг.1 изображен М ханизм фиксации в разрезе с ползуном в крайнем правом положении) на фиг.2 то же, когда на ползун действует толкатель в крайнем левом положении (нечетное нажатие толкателя); на фиг.З - то же, с пoлэyнoм Jв крайнем левом положении после отхода от нег толкателя (после нечетного нажатия толкателя)} на фиг.4 - положение звездочки механизма фиксации при четном нажатии подвижного упора; на фиг.5 - разрез А-А на фиг.1; на фиг.б - разрез Б-Б на фиг.5 (положение сухарей соответствует положению механизма фиксации на фиг.1); на фиг.7 - разрез Б-Б на фиг.5 (положение сухарей соответстует положению механизма фиксации на фиг.З); на фиг.8 - разрез В-В на фиг.6(разомкнутый ряд изделий с уклоном впр во); на фиг.9 - разрез Г-Г на фиг.7 (уплотненный ряд изделий с уклоном влево). Механизм фиксации рабочих положений исполнительного органа содерж корпус 1, имекячий две полости, разд ленные внутреннним выступом 2, и размещенный в полости корпуса соста ной ползун 3. Первая часть составно ползуна выполнена в виде стержня 4 вилкой 5 на одном конце и буртом б другом и стержня 7, а вторая часть в виде-стержня 8, на котором укрепл хомут 9 и упор-носок 10. Ползун 3 установлен в направляющей втулке 11 Пружина 12 размещена между направля щей втулкой 11 и буртом 6, а пружин 13 - между буртом б и втулкой 14, с гайкой 15, установленными на свобод ном конце стержня 7. В стержне 8 имеется полость 16, окно 17 и упор 18. В полости корпуса 4, где размещен стержень 8, на оси 19 шарнирно закреплена четырехконечная звездочкк 20. Сам корпус 1 шарнирно прикре лен к раме 21 осью 22, а вилка 5 осью 23 к рычагу 24 исполнительного органа. Сорсно с ползуном 3 установ лено ведущее звено толкатель 25.Рычаг 24 закреплен на штанге 26, связанной ipK помощи подшипников 2 с рамой 21. Механизм фиксации рабочих положе НИИ исполнительного органа работает следующим образом. При первом нажатии толкателя 25 на стержень 8 ползуна 3 стержень 8 идет влево и через втулку 14 пружину 13 давит на.бурт б, смещая его до упора в направляющую втулку 11, при этом сжимается пружина 12, так как при дальнейшем движении влево стержня 8 пружина 13 гораздо жестче пружины 12, первая часть ползуна 3, упираясь буртом 6 во втулку 11, стоит на месте, сжимается пружина 13, носок 10 действует на верхний зуб звездочки 20 и разворачивает ее в положение, изображенное на . фиг.2. При отходе толкателя 25 вправо под действием более сильной пружины 13, стержень 8 смещается вправо вслед за толкателем, упором 18 разворачивает звездочку 20 в положение, изображенное на фиг.З, и останавливается нижними зубьями этой звездочки, сдавшими враспор на упоре 18, фиксируя таким образом, исполнительный орган 24 в крайнем левом положении. При повторном нажатии толкателя 25 на стержень 8, последний смещается влево, при этом, сжимается пружина 13, носок 10 давит на второй зуб звездочки 20, разворачивая ее в положение двумя зубьями в окно 17 (фиг. 4) а первая часть ползуна 3 все это время остается в своем крайнем левом положении. При отходе толкателя 25 вправо стержень 8 также вслед за ним идет вправо, сначала под действием пружины 13, а после того как она выберет свободную плиту на стержне 7, под действием пружины 12, которая отводит первую часть ползуна 3 вправо до упора бурта б в выступ 2 и хомута 9 в торцовую стенку корпуса. При этом звездочка 20 свободно разворачивается упором 18 из положения на фиг.4 в положение на фиг.1, не препятствуя движению в свое крайнее правое положение ползуна 3, при этом ползун 3 приводит н удерживает рычаг 24 исполнительного органа во втором положении - в своем крайнем правом положении. Рычаг 24 через штангу 26 приводит и фиксирует поочередно в двух положениях сухари 28- в соответствии с направлением уклона клиновидных изделий 29, поступающих разомкнутыми рядами на плиту 30 и поочередно от ряда к-ряду меняющих направление уклона (фиг.б, 8 и 7, 9). Благодаря наличию механизма фиксации возможно уплотнение сформированного ряда клиновидных изделий без нарушения прямолинейности этого ряда при смешении плиты 30 с изделиями в направлении упора 31. Использование механизма фиксации рабочих положений исполнительного органа предложенной конструкции позволит фиксировать исполнительный орган различных механизмов в двух заданных положениях. Формула изобретения Механизм фиксации рабочих положений исполнительного органа,содержащий корпус, шарнирно соединенный с рамой исполнительного органа, подпружиненный ползун, размещенный в полости корпуса с возможностью осевого перемещения, и связанный с веду1цим звеном и четырехконечную звездочку. шарнирно укрепленную в полости корпуса с возможностью контакта с ползуном,, отличающийся тем -что, с целью попеременной фиксации исполнительного органа в двух заданных положениях, ползун выполне из двух частей а пружина установлена между ними-, причем, первая часть ползуна снабжена дополнительной пружиной, размещенной между упомянутой частью и корпусом и шарнирно соедине на с Исполнительным органом, а втора часть ползуна установлена с возможностью контакта со звездочкой и ведущим звеном. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство CCCf Ю 539821, кл. В 66 С 1/30, 1973, 2.Авторское свидетельство СССР В 570540, кл. В 66 С 1/42, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки слоя штучных изделий на поддоны | 1978 |
|
SU781067A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
| Тележка складная с полуавтоматическим раскладыванием, складыванием по средством одной кнопки с складными насадками пружинный толкатель, инструментальный ключ и функцией построения тележкой конструкций типа контейнер | 2019 |
|
RU2743301C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1994 |
|
RU2077470C1 |
| Роторно-конвейерная линия | 1987 |
|
SU1706837A1 |
| СИЛЬФОННЫЙ ДВИГАТЕЛЬ КОСТИКОВА | 1995 |
|
RU2098674C1 |
| Проходческий комбайн | 1980 |
|
SU981614A1 |
| Силовой орган механического пресса | 1980 |
|
SU893572A1 |
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Полуавтомат для сборки звеньев цепи кабелеукладчика | 1989 |
|
SU1648719A1 |
15 18 S 2В g g,II.,. 7« fg W 17 J
1
/5 rr J
2/
;7 2S ;
.иг,5 5
ff26
i
el
az.fi
B-s
2826
,
д
Л
/
Фаг.7 Г-г
38
