f
Изобретение относится к измерительной технике, точнее к измерению температуры, и может быть использовано в океанографических и аэрологических исследованиях для измерения пространственного распределения температуры в океане или в воздухе движущимся инерционным датчиком.
Известны способы измерения профиля температуры в среде путем поступательного перемещения датчика, например, с помощью зонда падающего или взлетающего вертикально в воде или воздухе с постоянной или переменной скоростью 1 ,
Недостатком этих способов является трудность учета динамических погрешностей измерения .
Наиболее близким п,р .технической сущности и достигаемому результату является способ измерения профиля температуры, заключающийся в перемещении инерционного датчика температуры с фиксацией его пространственнго положения в исследуемой среде и изме;ренйи его выходного параметра f2 .
Недостатком этого-способа является то, что из-за инерционности датчика имеет место существенная динамическая погрешность в среде с большими переменными градиентами температуры. Для достижения динамической погрешности обычно понижают инерционность датчика, что затруднено в технологическом отношении, поскольку морские датчики должны быть защищены от давления и им необходим прочный корпус. Снижение динамической погрешности за счет схемной или алгоритмической коррекции частной характеристики инерционного датчика имеет ограниченные возможности, поскольку при этом требуется точное знание этой характеристики и ее стабильность во времени, что трудно обеспечить для морских датчиков из-за их коррозии и обрастания.
Цель изобретения - повышение точности измерений.
Указанная цель достигается тем, что осуществляют возвратно-поступательное движение датчика температуры и в моменты времени равенства нулю производной выходного параметра датчика регистрируют его значение.
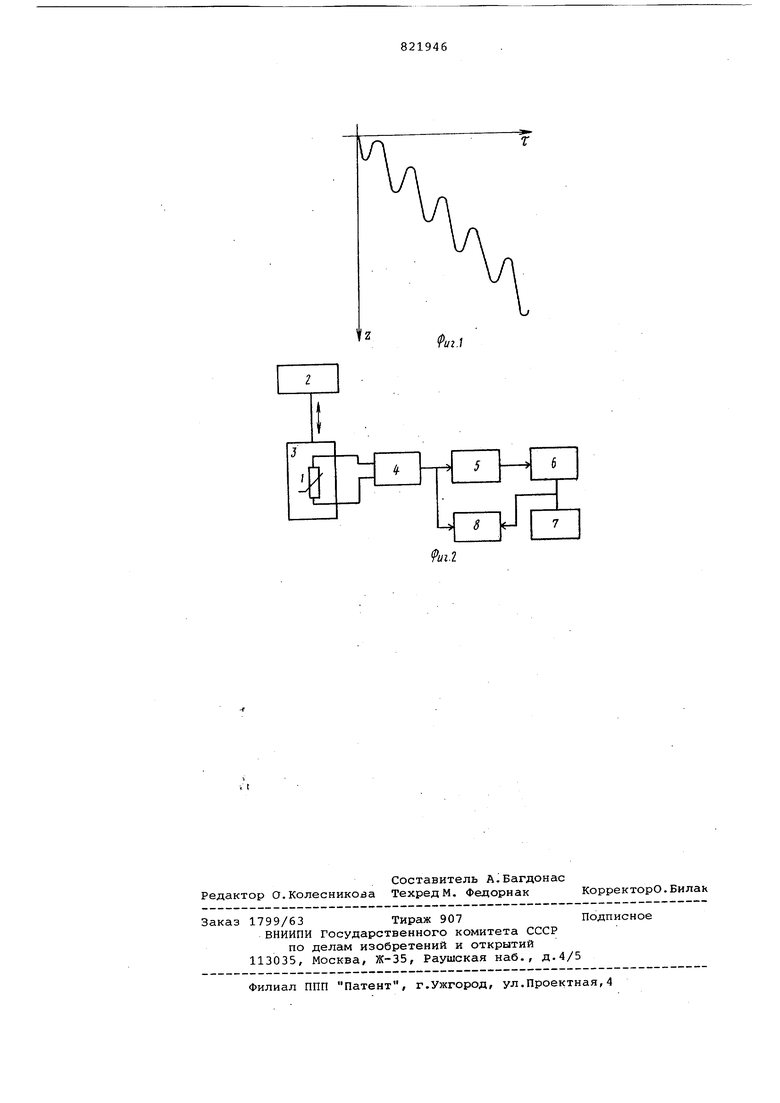
Возвратно-поступательное движение осуществляют таким образом, что каждая точка по траектории скани ю0вания среды последовательно пересекается три раза, а значения сигнала на выходе инерционного датчика измеряют только в те моменты времени, в которые производная этого сигнала равна нулю. На фигЛ показана развертка вертикальной -траектории зонда, перемеТцающегося возвратно-поступательно; на фиг.2 - структурная схема устройства, реализующего данный способ. Известно, что выходной х(f ) гу tC) сигналы инерционного датчика, являющегося звеном 2-го порядка, связаны зависимостью t° С )(S ) , где Т - постоянная времени датчика. tO{) x(t). Очевидно, при Следовательно, при равенстве нулю производной выходного сигнала х датчика значение входного сигнала t° в этот момент времени может быть без динамической погрешности определенно по значению выходного сигнала х и обратной статической функции преобразования t(x) . Если изменчивость температуры на некотором участке в профиле t{) монотонна, то при чисто поступательном движении не будет точек отсчета,при которых -j 0. Чтобы получить отсчеты температуры, свободные от динамической погрешности на участках с монотонным изменением температуры осуществляют возвратно-поступательно движение датчика (см.фиг.1). При Таком движении датчика градиент темпе ратуры на его входе изменяет знак, что обуславливает появление экстреMVMOB в выходном сигнале датчика х и, следовательно, моментов съема ин формации. Поскольку последователь ность таких отсчетов не является равномерной, то используют привязку отсчетов температуры ко времени. Устройство (фиг. 2) для реализаци способа измерения профиля температу ры инерционным датчиком 1 содержит механический блок 2 возвратно-посту пательного перемещения датчика в корпусе 3, измерительный блок 4, не обходимый для преобразования сопротивления датчика в удобный для обра ботки и регистрации сигнала, блок 5 дифференцирования, нулевой орган 6 датчик 7 сигналов времени, блок 8 регистрации. В качестве блока 2 вод вратно-поступательного перемещения датчика может использоваться для . океанографического зонда, например, реверсивная лебедка. Блоки 4-8 могут размещаться как в контейнере 3, так и вне его. В качестве измерительного блока 4 может использоваться аналоговый (например,моет) или цифровой преобразователь. В соответствии с сигналом на выходе блока 4 все остальные блоки 5-8 будут аналоговыми или цифровыми. Устройство работает следующим образом. Датчик 1 в корпусе 3 возвратнопоступательно перемещается по траектории съемки температурного профиля, задаваемым блоком 2. Сигнал с выхода измерительного блока 4, пропорциональный сопротивлению датчика 1 и с учетом осредняющего действия и градуировочной характеристики датчика измеряемой температуры, поступает на входы блока 5 дифференцирования и блока 8 регистрации. Момент равенства производной сигнала нулю фиксируется подключенным к выходу блока 5 нуль-органом б, который подает разрешение на выдачу метки времени в блок 7 и на регистрацию сигнала в блок 8. Таким образом, осуществляется дискретизация сигнала по времени с фиксацией неравномерной последовательности отсчетов сопротивления датчика, значения которых непосредственно связаны с мгновенными значениями температуры через градуировочную характеристику датчика и свободны от динамической погрешности. Формула изобретения Способ измерения профиля температуры, заключающийся в перемещении инерционного датчика температуры с фиксацией его пространственного положения в исследуемой среде и измерении его выходного параметра, отличающийся тем, что, с целью повышения точности измерения, осуществляют возвратно-поступательное движение датчика температуры и в моменты времени равенства нулю производной выходного параметра датчика регистрируют его значение. Источники информации, принятые во внимание при экспертизе 1.Лоуренс Л, Электроника и океанография. М., МО СССР, 1969, с.57, 2.Патент ФРГ № 1623648, кл.С 01 К 3/04, 18.03.71 (прототип).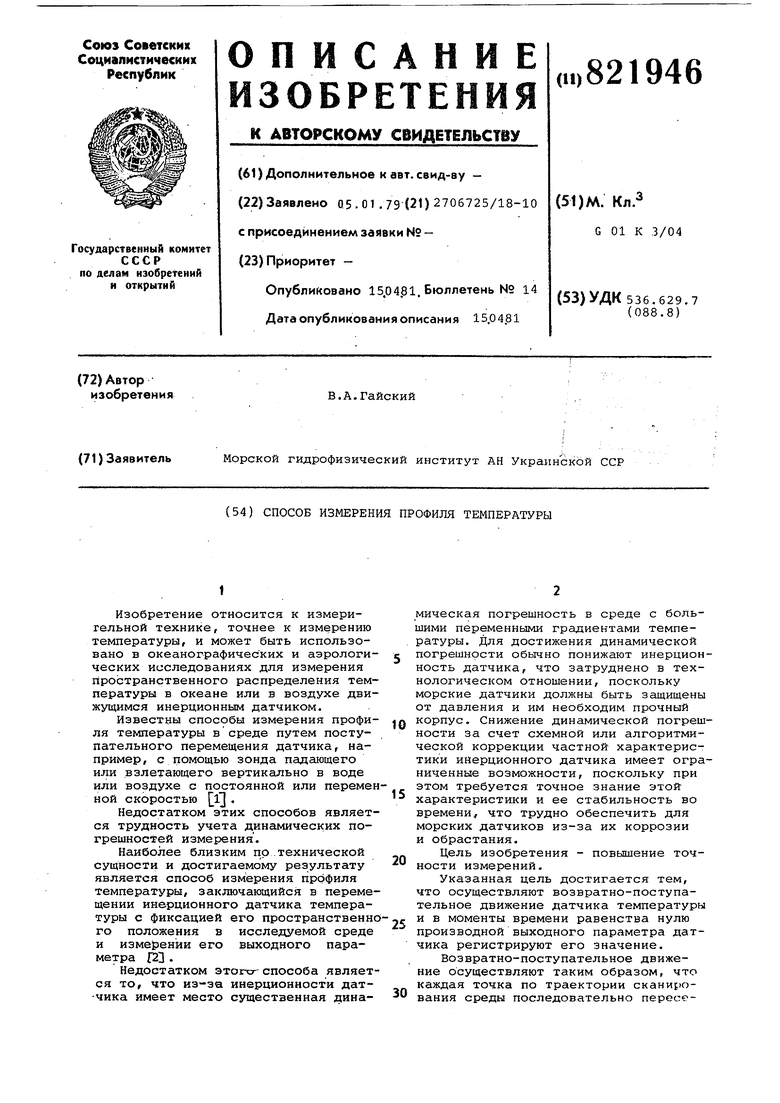
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИМ ЗОНДОМ В СЛОЯХ С БОЛЬШИМИ ГРАДИЕНТАМИ ИЗМЕРЯЕМЫХ ПАРАМЕТРОВ | 2000 |
|
RU2192026C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| Способ измерения горизонтальных профилей гидрофизических полей | 1988 |
|
SU1635154A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для измерения температуры воды, донных осадков и теплопроводности донных осадков | 1986 |
|
SU1465722A1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| Способ телеизмерения вертикальной структуры гидрофизических полей | 1981 |
|
SU1012308A1 |
| Способ определения параметров инерционности датчиков физических величин и устройство для его осуществления | 1988 |
|
SU1656325A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ГРАНИЦ РАЗДЕЛА СРЕД | 2003 |
|
RU2250439C2 |