Изобретение относится к приборостроению и может быть использовано для определения параметров инерционности (постоянных времени) датчиков различных физических величин, например датчиков температуры, давления и т.д. в соответствующей измерительной аппаратуре.
Цель изобретения - повышение точности измерений и увеличение достоверности полученных результатов за счет проведения измерений в реальных условиях применения датчиков.
На чертеже представлена структурная схема устройства, с помощью которого осуществляют предлагаемый способ.
Устройство содержит первый и второй датчики 1 и 2 физических величин с заведомо различными показателями инерционности, выходами подключенные к входам Первого 3 и второго 4 дифференциаторов, а также к входам первого вычитателя 5. Устройство содержит также второй вычитатель б, первый 7 и второй 8 нуль-органы, реле 9 времени с перезапуском, элемент ИЛИ С ЗАПРЕТОМ 10, первый формирователь 11 импульсов, инвертор 12, три аналоговых ключа 13, 14 и 15, первый блок 16 деления, элемент 17 памяти, блок 18 умножения, первый 19 и второй 20 сумматоры, второй блок 21 деления, компаратор 22, RS-триггер 23, Элемент И 24, второй формирователь 25 импульсов, первый 26 и второй 27 блоки регистрации.
Выходы первого и второго дифференциаторов 3 и 4 соединены с входами второго вычитателя 6, выходом связанного через последовательно включенные второй нуль-ор- ган 8 и реле 9 времени с перезапуском, с входом Запрет элемента ИЛИ С ЗАПРЕТОМ 10, к информационному входу которого подсоединен через первый нуль-орган 7 выход первого дифференциатора 3. Выход элемента ИЛИ С ЗАПРЕТОМ 10 через первый формирователь 11 импульсов подключен к S-входу RS-триггера 23 и к управляющим входам первого 13, второго 14 и третьего 15 аналоговых ключей, информационные входы которых соединены соответственно с выходом второго дифференциатора 4, с выходом через инвертор 12 первого вычитателя бис выходом первого блока 16 деления. Выходы аналоговых ключей 13- 15 соединены соответственно с первым и вторым входами первого блока 16 деления и с входом элемента 17 памяти, выход которого через последовательно включенные блок 18 умножения, первый сумматор 19 и второй блок 21 деления связан с информационным входом первого блока 26 регистрации, а через второй сумматор 20 - с
информационным входом второго блока 27 регистрации.
Управляющие входы обоих блоков регистрации и R-вход RS-триггера 23 подключены к выходу второго формирователя 25 импульсов, входом соединенного с выходом элемента И 24, к входам которого подсоединены выход RS-триггера 23 и выход компаратора 22, входом связанного с выходом
0 второго вычитателя 6. Второй вход блока 18 умножения соединен с выходом второго дифференциатора 4, второй вход первого сумматора 19 - с выходом первого вычитателя 5, второй вход второго блока 21 деле5 ния - с выходом второго вычитателя б, а выход второго блока 21 деления - с вторым входом второго сумматора 20,
Техническая сущность предлагаемого способа заключается в следующем.
0 Если в реальных условиях режима эксплуатации датчика (или близкого к нему специально созданного измерительного режима) выделить достаточно продолжительный интервал времени с постоянным линейным
5 изменением скорости входного воздействия, т.е. npHx(t) a const, то для показаний y(t) датчика справедливо выражение
y(t) x(t)-ar,(1)
где т - параметр инерционности (постоян0 ная времени) данного датчика.
Для двух датчиков с заведомо различной инерционностью ri f та, помещенных в идентичные условия физической среды, на основании выражения (1) получим
5 yi(t)-y2(t) (r2-n)-a,(2)
кроме того, из равенства (1) следует yi(t) Y2(t) x(t) а(3)
Совместное решение уравнений (2) и (З)дает
0 Ar Ti-Ti
-yi(t)-yz(t)yi(t)-V2(t) ay(t)
где yi(t) - y2(t) - разность показаний датчиков в установившемся режиме:
5 y(t) x(t) a - скорость изменения показаний любого из датчиков, равная в установившемся режиме скорости изменения входного воздействия на датчики, поэтому возникает задача выявления достаточно
0 продолжительных интервалов времени, соответствующих установившемуся режиму с постоянной скоростью изменения входного воздействия. Само входное воздействие обычно недоступно для непосредственно5 го измерения его скорости изменения, а требуемая продолжительность установившегося режима зависит от неизвестных (их еще предстоит определить) параметров инерционности датчиков, что связано с за(4)
туханием переходных составляющих показаний датчиков,
В предлагаемом способе для решения упомянутой задачи используется условие равенства производных выходных сигналов датчиков на некотором конечном временно / интервале At.
Обоснование необходимее я доста- точьс-сти такого условуиДля реакщ-и; y(t) лине к;,, о :,лены с па- роцаточной функцией G, на .У-ОД-ьзе Ј..- действие x(t) справедливо я;то
y(t)-i {xW(t) ; (5)
k О к
Выразив передзточ гю функцию датчич
;;а а виде G(s) и учитывая, что
вы рол- ;ни (5)
(6) (7)
G (O)- k.. ( записать в виде y(t) x(t)-rx(t)
гдеД(гд) 2 (-ту -x(iVt)
I 2
Достаточность заявленного условия вытекает из выражений (6) и (7), откуда, полагая x(t) а const, получим, что
A(r,t) 0 и y(t) ) a const, причем в последнее тождество нэ входит постоянная времени т датчика, и выполняется равенство yi(t) У2(т) x(t) a.
Далее из равенства производных выходных сигналов датчиков нз некотором конечном интервале времени Ate необходимостью следует и линейность изменения входного воздействия. Пусть з некоторый момент времени to выполнено разенстзо yi(to) yzfto) и на отрезке времени to t to + At входное воздействие x{t) аппроксимируется полиномиальной зависимостью. Тогда, если это полином первого порядка принять x(t) х0 at, то yi(t) x(t) a; ya(t) x(t) а, т.е. на всем временном интервале At выполняется условие yi(t) y2(t).
Если это полином втора I D порядка x(t) х0 -ь at + bt2, то yi(t) з + 2bt - 2b ri, y2(t) a + 2bt - 2b T2, т.е. равенство yi(t) y2(t) возможно только при n Г2, что противоречит исходному требованию различных постоянных времени т- - TI датчиков.
Аналогично можно показать, что при полиномах более высокого порядка не исключаются отдельные моменты времени, когда выполняется равенство yi(t) y2(t), но оно не может быть выполнено на всем интервале At.
Для определения искомых показателей инерционности п и та необходимо обеспе0
5
0
5
0
5
:-:ить идентичность физических условий окружающей среды для обоих исследуемых датчиков. Для измерения может использоваться реальный нестационарный режим эксплуатации датчиков. Тогда для любого момента времени этого режима справедливо равенство
-(;} yi(t} + Ti-yi(t) - V Ht) + (8)
Со-.:..;;-тно5 ;ч .ме уравнений ( (4)дзет v, Л - у, (Г; + д т
«(О
Л
yi (-.) - (tj
(9}
:--2 г-, ) Л г(10)
Таким ооразом, измерение зыходных .алов .ков и их производных в двух .имах - з устз озизш-емся с постоянной с.соростью изменения входного воздействия м в произвольном нестационарном, со- OTuSTCTRyioi.iie.M реальным условиям примз- ;;.;ния датчика, - позвсг.яе: с помощью расчетных формул(4), (9) и (10) определить параметры имерционност:.1 (постоянные времени) двух датчиков с различной инерционностью.
Предлагаемый способ осуществляют следующим образом.
Для определения параметров инерционности датчиков, например для определения постоянной термической инерции датчиков температуры, помещенных в идентичные нестационарные рабочие условия эксплуатации непосредственно на работающей установке, ведут непрерывное измерение скоростей изменения показаний датчиков и сравнение этих скоростей..При появ- некоторо о конечного интервала времени с ровными и отличными от нуля значениям:.-; этих скоростей (зеличина интервала выбирается эмпирически в зависимости от свойств установки и характера протекающих в ней процессов) производят в пределах этого временного интервала измерение разности показаний датчиков Ауст yi(t) - - y2(t) и скорости изменения показаний одного из датчиков vyCT yi(t) y2(t), после чего определяют разность постоянных термической инерции датчиков по формуле Аг го - ri
А
уст
VyCT
Далее продолжают измерение и при неравенстве скоростей производят, в произвольный момент времени одновременное измерение: разности показаний датчиков (Ан y2(t) - yi(t); разности скоростей измерения показаний(Д VH yi(t) - ya(t)); и скорости изменений показаний второго датчика VH y2(t), после чего определяют постоянную термической инерции первого датчика по формуле
Г1
АН +ДГ VH
AvH и второго датчика по формуле
Г2 Т1 + ДГ.
Устройство, с помощью которого осуще- ствляют предлагаемый способ, работает следующим образом.
На первом этапе с помощью первого и второго дифференциаторов 3 и 4 и второго вычитателя 6 осуществляют непрерывное измерение и сопоставление скоростей изменения показаний датчиков 1 и 2. При равенстве этих скоростей срабатывает второй нуль-орган 8 и запускает реле 9 времени с перезапуском. Если в пределах установленной выдержки времени этого реле равенство скоростей нарушается, то элементы 8 и 9 возвращаются в исходное состояние. Если равенство скоростей сохраняется в течение заданного интервала времени (которое выбирается эмпирически, с учетом свойств входного воздействия на датчики), установленного в реле 9 времени, последнее ерабг- тывает и сигнал поступает на информационный вход элемента ИЛИ С ЗАПРЕТОМ 10. Если при этом скорости изменения показаний датчиков отличны от нуля, на выходе первого нуль-органа 7 отсутствует сигнал запрета дпя элемента 10, сигнал с выхода реле 9 времени проходит через элемент 10 и запускает первый формироаате ), I4- импульсов, or которого срабатывает RS-триг- rep и все три аналоговых ключа 13, 14 /« 5. В первом блоке 16 деления при этом определяется разность показателей инерционности датчиков в соответствии с формулой (А), которая запоминается в элементе 17 памяти.
На втором этапе сопоставление скоростей изменения показаний датчиков выполняет компаратор 22. Как только разность скоростей превысит установленный порог, выходной сигнал компаратора 22 через элемент И 24 запускает второй формирователь 25 импульсов, выходной импульс которого возвращает в исходное состояние RS-триг- гер 23 и дает разрешение на регистрацию сигналов с информационных входов первого и второго блоков 26 и 27 регистрации. На входе блока 26 при этом присутствует сигнал, пропорциональный показателю инерционности (постоянной времени) первого датчика 1, сформированный в соответствии С формулой (9) элементами 18, 19 и 21. На входе второго блока 27 регистрации сигнал пропорционален постоянной времени второго датчика 2, этот сигнал формируется вторым сумматором 20 в соответствии с формулой (10). После завершения измерений устройство находится в исходном состоянии.
Предлагаемый способ, осуществляемый с помощью описанного выше реализующего
устройства, позволяет повысить точность определения параметров инерционности датчиков различных физических вел /шин, а также увеличить достоверность полученных результатов за счет проведения измерений
параметров инерционности датчиков непосредственно в процессе работы этих датчиков в реальных физических условиях их применения.
Формула изобретения
1. Способ определения параметров инерционности датчиков физических чин, при котором два датчика с заведомо различной инерционностью помещокп в идентичные условия физической среды, измеряют разность их показаний и скорость изменения этих показан и по расчетным формулам вычисляют параметры инерционности обоих датчиков, о личающийся тем, что, с целью повышения точности измерений и увеличения достоверности полученных результатов, датчики помещают в реальную физическую среду, в процессе измерения выделяют первый временной интервал с постоянной, отличной от нуля и
одинаковой для обоих датчиков скоростью Ууст изменения их показаний, в течение этого временного интерзала измеряют скорость Vycr и разность Ауст показаний первого и аторого датчиков, вычисляют разность
Дг параметров инерционности первого ri и второго т датчиков по формуле Дг га - т- - Ауст/vycT, после чего, продолжая процесс измерений, выделяют второй временной интервал с неравными одна другой скоростями изменения показаний обоих датчиков, в произвольный момент времени второго временного интервала одновременно измеряют разносч ь Ан показаний второго и первого датчиков, разность Д VH скоростей
изменения показаний первого и второго датчиков, а также скорость V1( изменения показаний второго датчика, после чего определяют параметры инерционности обоих датчиков по формулам
Ан+ Дг VH
Г2 Т1 + Дг.
2. Устройство для определения параметров инерционности датчиков физиче- ских величин, содержащее клеммы подключения двух датчиков с заяедомо различной инерционностью, подключенные к входам первого и второго дифференциаторов, выходами связанных с входами первого вычитателя. отличающееся тем, что, с целью повышения точности измерений и увеличения достоверности полученных результатов, в него введены второй вычитатель. два нуль-органа, реле времени с перезапуском, элемент ИЛИ С ЗАПРЕТОМ, два формирователя импульсов, инвертор, три аналоговых, ключа,элемент памяти, два блока деления, компаратор, блок умножения, два сумматора, RS-триггер, элемент И и два блока регистрации, выход первого дифференциатора связан через первый нуль-орган с входом Запрет элемента ИЛИ С ЗАПРЕТОМ к информационному входу которого подсоединен через последовательно включенные второй нуль-орган и реле времени с перезапуском выход второго вычитателя, к первому и второму входам которого подключены соответственно выходы первого и второго дифференциаторов, выход элемента ИЛИ С ЗАПРЕТОМ через первый формирователь импульсов соединен с S-входом RS-триггера и с управляющими входами первого, второго и третьего аналоговых ключей, информационные входы которых соединены соответственно с выходом второго дифференциатора, с выходом через инвертор первого вычитателя и с выходом первого блока деления, а выходы этих ключей соединены соответственно с первым и вторым входами первого блока деления и с входом элемента памяти, выход которого через последовательно включенные блок умножения, первый сумматор и второй блок деления подлючен к информационному входу первого блока регистрации, а через второй сумматор - к информационному входу второго блоха регистрации, при этом управляющие входы обоих блоков регистрации и R-вход RS-триггера подключены к выходу
второго формирователя импульсов, вход которого соединен с выходом элемента И , к входам которого подсоединены выход RS- триггера и выход компаратора, входом связанного с выходом второго вычитателя, к
вторым входам блока умножения, первого сумматора, второго блока деления и второго сумматора подключены выходы соответственно второго дифференциатора, первого вычитателя, второго вычитателя и второго
блока деления.


| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЕМКОСТНЫМИ СОСТАВЛЯЮЩИМИ ОБЪЕКТА | 2009 |
|
RU2442206C2 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2012 |
|
RU2497136C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Устройство для измерения угла фазового сдвига гармонических сигналов | 1990 |
|
SU1765781A1 |
| Устройство для определения оптимального времени начала проведения технического обслуживания изделия | 1991 |
|
SU1800468A1 |
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Устройство для автоматического измерения параметров радиотехнических элементов | 1986 |
|
SU1429051A1 |
Изобретение относится к приборостроению и может быть использовано для определения параметров инерционности (постоянных времени) датчиков различных физических величин, например температуры, давления и т.д. На первом временном интервале дифференциаторы 3 и 4 производят непрерывное измерение скоростей изменения показаний датчиков 1 и 2, помещенных в идентичные условия физической среды, в вычитателе 6 осуществляется их сравнение. Если на выбранном временном интервале сохраняется равенство этих скоростей (установившийся режим с постоянной скоростью изменения входного воздействия) через нуль-орган 8, реле 9 времени с перезапуском и элемент ИЛИ с запретом 10 запускается формирователь 11 импульсов, от которого срабатывают аналоговые ключи 13-15, RS-триггер 23, и начинает работать схема измерений. Первым блоком 16 деления определяется разность А г параметров инерционности обоих датчиков, которая запоминается в элементе 17 памяти. При этом умножитель 18, сумматор 19 и второй блок 21 деления формируют сигнал, пропорциональный постоянной времени п первого датчика, а второй сумматор 20 - сигнал, пропорциональный постоянной времени т% второго датчика. На втором временном интервале сравнения скоростей изменения показаний датчиков осуществляет компаратор 22. При их неравенстве, когда разность скоростей превышает установленный порог, через элемент И 24 и формирователь 25 дается разрешение на запись полученных результатов в блоки 26 и 27 регистрации, после чего срабатывает RS-триггер 23 и схема измерений возвращается в исходное состояние. Точность измерений и достоверность полученных результатов повышаются за счет того, что измерение параметров инерционности датчиков приводят непосредственно в процессе реально й работы датчиков в заданных условиях. 2 с.гтгцф-лы. 1 ил. сл о. ел о ы ho ел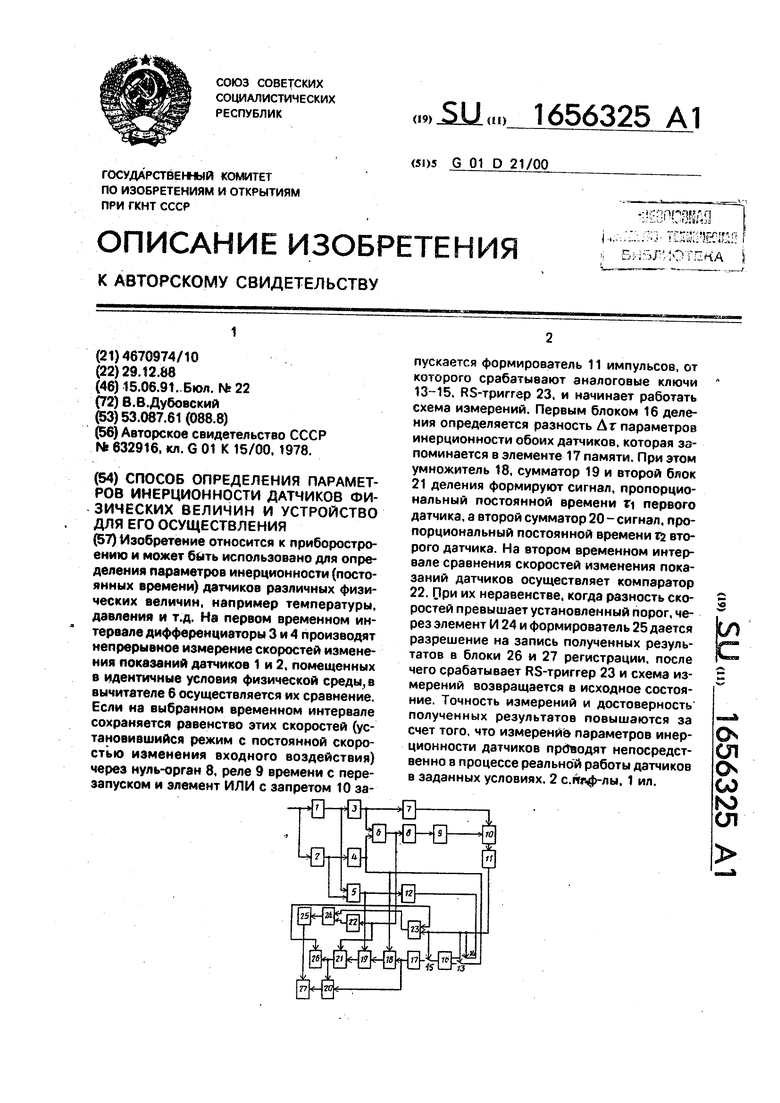
| Способ определения постоянной термической инерции датчиков температуры | 1971 |
|
SU632916A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
