ю
Од 00
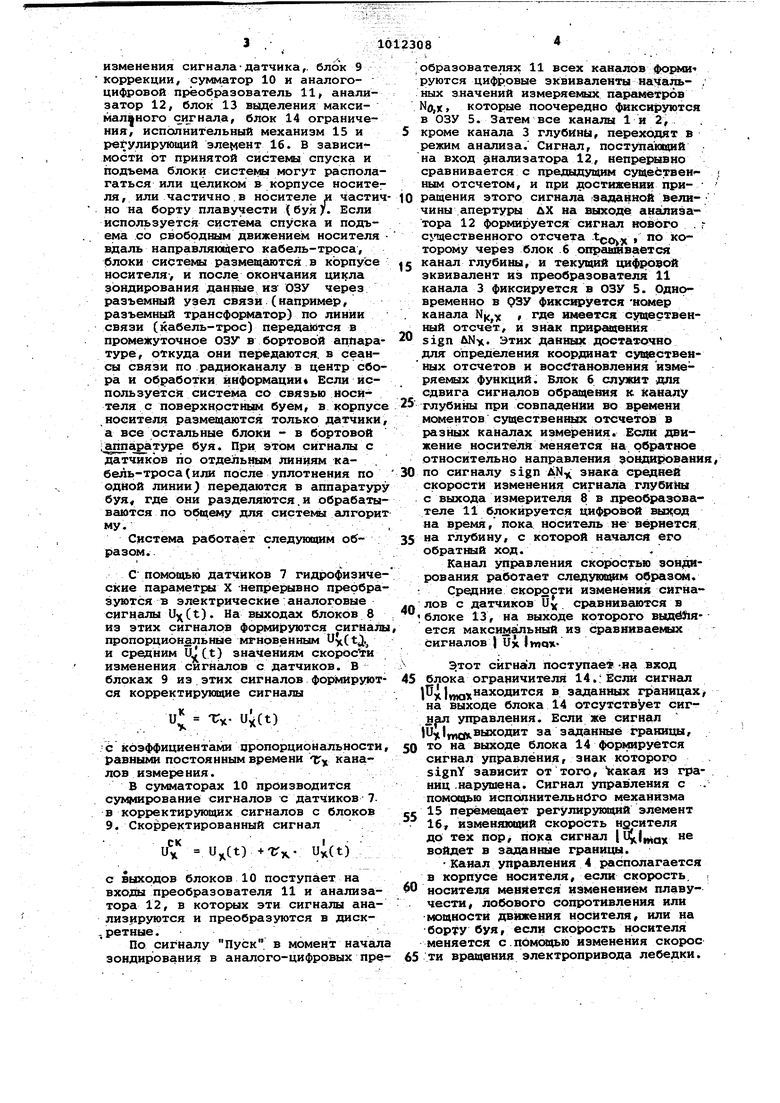
Изобретение относится к океанографической технике и может быть использованодля создания автрномны зондирующих.гидрофизических систем, предназначенных для длительного и многократного измерения вертикальной структуры гидрофизических параметров в морях и океанах, например, с заякоренных автоматических буйковых станций, платформ и т.д. Известен способ измерения и пере дачи гидрологических параметров, ос нованный на том, что перемещают с переменной скоростью носитель с аппаратурой на заданную глубину, прои водят асинхронное с разделением во времени и с постоянной частотой дискретизации преобразование гидрологических параметров в цифровые зквиваленты, передают их по каналу св зи и регистрируют в цифровом и анал говом виде, причем скорость носител меняют изменением скорости вращения электролебедки в зависимости от гра диента одного из регистрируемых параметров t. Однако этому способу свойственны большие динамические погрешности и большой объем избыточной информации За счет управления скоростью движения носителя этот способ позволяет уменьшить общее время зондирования. Большое время измерения не позволяе считать достоверной измеренную верт кальную структуру из-за-ее изменчивости при длительном зондировании. Наиболее близким к изобретению. является способ телеизмерения верти кальной структуры гидрофизических полей, заключающийся в синхронном преобразовании сигналов датчиков глубины и скорости в электрические аналоговые сигналы, в последующем преобразовании аналоговых сигналов в дискретные и в запоминании дискре ных сигналов. Этот способ по сравнению с аналогами имеет меньшую диамет рическую погрешность за счет того, что в нем благодаря синхронному преобразованию, передаче и оцифровке инфЬрмации не образуется динамической составлякяцей погрешности, связанной с коммутацией каналов во времени. Это позволяет более точно при.вязывать измеренные парамет о к глубине. Кроме того, частотный способ преобразования и передачи информации позволяет увеличить частоту дискретизации сигнала, так как время преобразования периода:.следования им- пульсов в код может быть сделано очень малым. Эт,о уменьшает составляю щую дине1мической погрешности, связанную с осреднением за время преобразования 2 , Однако такбй способ не позволяет устранить составляющую динамической погрешности/ связанную с инерцирнностью датчиков. Кроме того, принятый способ равномерной дискретизации во времени приводит к большому объему избыточной информации, которая перегружает память, каналы передачи и ЭВМ. Недостатком описанного способа является также невозможность изменения CKOpocTij движения носителя во время зондирования, которую можно менять только перед началом каждого цикла путем установления требуемой плавучести носителя; свободно движущегося вдоль направляющего кабельтроса. Это не позволяет уменьшить общее время зондарования и приспособить описанный способ к изменяющимся внешним условиям.Кроме того, известнЫ й способ не п риспособлен к автоматизации многоциклового измерения в автономном ре-, жиме. Цель изобретения - повышение точ-. ности измерения. Поставленная цель достигается тем, что согласно способу телеизмерения вертикальной структуры гидрофизиче,ских полей, заключающемуся в перемещений измерителя по вертикали и в синхронном преобразовании сигналов измерителя в электрические аналоговые сигналы, в последующем преобразовании аналоговых сигналов в дискретные и в запоминании дискретных сигналов, из электрических аналоговых сигналов формируют корректирую-. щир сигналы, амплитуды которых пропорциональны скорости изменения аналоговых сигналов и постоянны времени измерителя, по которым корректируют электрические аналоговые сигналы и фиксируют дискретные сигналы, соответствующие началу телеизмерения, формируют дискретные сигналы суще- . ственных отсчетов в моменты достижения электрическими аналоговыми сигналами заданных значений, запоминают дискретные сигналы глубины те-леизмерения, соответствующие моментам формирование; существенных отсчетов при прямом йаправлении перемещения измерителя по вертикали, и скорость перемещения измерителя изменяют так, чтобы максимальная из средних скоростей изменения электрических аналоговых сигналов не превышала заданную. На чертеже изображена структурная схема системы, реализующей предлагаемого способа. Система содержит измерительные ка-i налы 1-3 по числу измеряекых гидрофизических параметров, канал 4 управления скоростью зондирования, оперативное запоминающее устройство (.ОЗУ) 5, логический блок б. Каждый из измерительных каналов содержит датчик 7, измеритель 8 скорости
изменения сигнала-датчика,, блок 9 коррекции, сумматор 10 и аналогоцифровой преобразователь 11, анализатор 12, блок 13 выделения максимал|ного сигнала, блок 14 ограничения, исполнительный механизм 15 и регулирующий 16. В зависимости от принятой системы спуска и подъема блоки системы могут располагаться или целиком в корпусе носитег ля, или частично.в носителе и частично на борту плавучести (буя 7. Если используется система спуска и подъема со свободным движени «1 носителя вдаль направляющего кабель-троса, блоки системы размбацшотся в корпусе носителя, и после окончания цикла зондирования данщле из ОЗУ через разъемный узел связи (например, разъемный трансформатор) по линии связи (кабель-трос) переда бтся в промежуточное ОЗУ в бортовой аппаратуре, откуда они передаются, в сеансы связи по радиоканалу в центр сбора и обработки информации Вели используете) система со связью носителя с поверхностным буем, в корпусе носителя размещаются только датчики, а все остальные блоки - в бортовой : ацпаратуре буя. При этом сигналы с датчиков lio отдельным линиям кабель-троса (или после уплотнения по одной линии) передаются в аппаратуру буя, где они разделяются.и обрабатываются по общему для системы алгорит му. - , . -;.Система работает следуюпшм образом.
С помощью датчиков 7 гидрофизические параметра X непрерывно преобразуются в злектрические:аналоговые сигналы U(t). На выходах блоков 8 из этих сигналов формируются сигналы пропорциональные мгновенным Ux(tj,, и средним Uj(t) значениям скорости изменения сигналов с датчиков. В блоках 9 из этих сигналов формируются корректирующие сягналы
Uj TX- (J(t)
с кЬэффициент)ами аропорциональности равными постоянным времени ir каналов измерения.
В сумматорах 10 производится су1«91ирование сигналов с датчиков 7в корректирующих сигналов с блоков 9. Скорректированный сигнал
ul
Ux(t)
u-(t)
с выходов блоков 10 поступает на входы преобразователя 11 и анализатора 12, в которых эти сигналы анализируются и преобразуются в диск.ретные.
По сигналу Пуск, в момент начала зондирования в аналого-цифровых пребра зова те лях 11 всех каналов уются цифровые зквиваленты наЧаль- , ных з.начений измеряемых параметров (j,j(, которые поочередно фиксируются в ОЗУ 5. Затем все каналы 1 и 2, .
кроме канала 3 глубины, переходят в режим анализа. Сигнал, поступающий на вход |1нализатора 12, непре1 ывно сравнивается с предыдущим сущебтаеи- ным отсчетом, и при недостижении при-
ргицения этого сигнала |Эаданной вели- : чины апертуры ДХ на выходке ангшиэатора 12 формируется сигнал нового . г с тцественного отсчета .j5 , по которому через блок .6 опрашивается
канал глубины, и текущий цифровой зквивсшент из преобразователя 11 канала 3 фиксируется в ОЗУ 5. Одновременно в рЗУ фиксируется -номер канала N , где имеется с;лцэственный отсчет, и знак пЕтрсвдекия
sign ANx. Этих данных достаточно для определения координат cytoeCTBeHных отсчетов и восстановления измеряемых функций. Блок 6 служат для сдвига сигналов обращения к. каналу
глубины при совпадении во времени моментов существенсшх отсчетов в разных каналах измерения. Если движение носителя меняется на обратное относительно направления зондирования,
по сигналу sign знака средней
скорости изменения сигнала глубины с выхода измерителя 8 в преобразователе 11 блокируется цифровой выход на время, пока носитель не вынется
на глубину, с которой начался его обратный ход.
Канал управления скоростью зон,ди рования работает следующим образе). Средние скорости изменения сигвалов с датчиков Uy сравниваются в блоке 13, на выходе которого вьщёйяется максимальный из Сравнивае|Ф1Х сигналов ) Ux Irnax
Этот сйгнагл поступает -иа вход
блока ограничителя 14.: Если сигнал П),, находится в заданных границах на выходе блока 14 отсутствует сигнал управления. Если же сигнал ,а,1 выходит за заданные граюнда,
то на выходе блока 14 форкяруется сигнал управления, знак которого signY зависит от того, Лсакая из границ .нарушена. Сигнал управления с . помощью исполнительного механизма
15 перемещает регулирующей элемент 16, изменяювдай скорость носителя до тех пор, пока сигнал I l lniax войдет в заданные границы.
Канал упргшления 4 располагается в корпусе носителя, если скорость, .
носителя меняется изменением плавучестиf лобового сопротивления или мощности движения носителя, или на борту Оуя, если CKOjpocTb носителя меняется с.пОмсщью изменения скорое
ти вршцения электропривода лебедки.
За счет формирования корректирую щиХ сигналов в.зависимости от скорости изменения сигналов с датчиков и постоянных времени измерительных каналрв уменьшается динамическая погрешность измерения нестационарных процессов инерционным измерите-v
лем, а за счет управления скоростью движения носителя в зависимости от средней скорости изменения сигналов с датчиков сокращается общее время зондирования, что повышает достовед)ность измеренной структуры гидрофизических пЪлей.
f
ijt
MUM.
1
N
fS
/4
.;;;j
иакс
Jk
//
f
fl
/Jyoff
tc4
I
fff
мл
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1054828A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1056246A1 |
СПОСОБ ТЕЛЕИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ СТРУКТУРЫ ГИДРС ФИЗИЧЕСКИХ ПОЛЕЙ, заключающийсяв перемещении измерителя по вертикали и в синхронном преобразовании сигналов измерителя в электрические аналоговые сигналы, в последующем преобразовании аналоговых сигналов в дискретные и в запоминании дискретных сигналов, отличающийся тем, что,. с целью повышения точности телеизме- рений, из- электрических аналоговых сигналов формируют корректирующие сигналы, амплитуды которых .пропорциональны скорости изменения аналоговых сигналов и постоянным времени . измерителя, по которым корректируют электрические аналоговые сигналы и фиксируют дискретные сигналы, соответствующие началу телеизмерения,, формируют дискретные сигналы существенных отсчетов в момен ш достижения электрическими аналоговыми сигналами; Заданных значений, запоминают дискретные сигналы глубины телеизмерения г соответствующие моментам формирования существенных отсчетов при прямом направлении перемещения измерителя (Л по вертикали, и скорость перемещения измерителя изменяют так, чтобы максимальная из средних скоростей изменения электрических аналоговых сиг-f налов не превышала заданную. g
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидрометоиздат, 1977, с | |||
| Регенеративный приемник | 1923 |
|
SU562A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исполнительный механизм имитатора пониженной гравитации | 1978 |
|
SU765686A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
