Изобретение относится к измерительной технике и может быть использовано в информационно-измерительных системах.
Целью изобретения является повышение точности измерения и счет интегрирования выходных напряжений циклического резистивного датчика.
По предлагаемому способу измерения линейных перемещении, заключающемуся в том, что интегрируют выходное напряже- .ние резистивного датчика, включенного в цепь источника опорного напряжения, интегрирование проводят за три такта; в первом также интегрируют выходное напряжение резистивного датчика, во втором также интегрируют напряжение, противофазное опорному, и одновременно фиксируют длительность второго такта интегрирования путем записи в счетчик серии целых импульсов, следующих с частотой f, в третьем также интегрируют напряжение, противофазное опорному и фиксируют при этом разность между значением сигнала в момент окончания второго такта и проинтегрированным значением сигнала в момент достижения нулевого значения напряжения и длительность третьего такта путем записи серии импульсов в счетчик с такой же разрядностью, что и первый, и по значениям зарегистрированных счетчиками кодов определяют величину перемещения, причем интегрируют выходное напряжение циклического резистивного датчика, при этом формируют сигнал направления подвижного вывода резистивного датчика относительно направления измеряемого перемещения и коммутируют сформированным сигналом зарегистрированный счетчиками код таким образом, что в течение длительности совпадающего движения результат измерения определяют по значениям зарегистрированных счётчиками прямых кодов, а в течение длительности несовпадающего движения результат измерения определяют по инверсным значениям зарегистрированных счетчиками кодов.
На фиг. 1 представлена схема устройства для измерения линейных перемещений; на фиг.2 - временная диаграмма его работы.
Устройство содержит циклический ре- зистивный датчик 1 с подвижным валом 2 и неподвижными выводами 3 и 4. Выводы 3 и 4 подключены соответственно к шинам О и А блока 5 питания, который имеет шины В и
С с отрицательным потенциалом относительно шины О. Подвижный вывод 2 через аналоговый вход 6 электронного ключа 7, шина В блока 5 питания через аналоговый вход 8 электронного ключа 9. шина С через
аналоговый вход 0 электронного.ключа 11 подключены к входу усилителя 12 постоянного тока. К выходу усилителя 12 подключе- ны последовательно соединенные интегратор 13, компаратор 14 и первый вход
15 блока 16 управления. К выходу интегратора подключен также нуль-орган 17, выход которого подключен к второму входу 18 блока 16 управления. Второй вход нуль-органа 17 соединен с шиной О блока питания. Блок
16 управления имеет шесть выходов 19. 20, 21. 22. 23 и 24. Первый выход 19 подключен к входу 25 синхронизации ключа 7. выход 20 - к входу 26 синхронизации ключа 9, а выход 21- к входу 27 синхронизации ключа 11.
Четвертый выход 22 подключен к счетному входу 28 счетчика 29, пятый выход 23 - к счетному входу 30 счетчика 31. а шестой выход 24 - к обнуляющим входом 32 и 33 каждого счетчика. Формирователь сигнала
направления движения подвижною вывода
циклического датчика относительно напряжения измеряемого перемещения выполнен в виде дополнительного циклического резистивного датчика 34 с подвижным выводом 35 и двумя неподвижными выводами 5 36 и 37. Кроме того, формирователь содержит второй нуль-орган 38. выход которого подключен к управляющим входам 39 и 40 двух коммутаторов 41 ил 42 кодов. Сигнальные входы 43.1...43.m и 44,1...44.т каждого 10 из коммутаторов подключены к соответствующим выходам счетчиков 31 и 32. Неподвижные выводы 36 и 37 дополнительного датчика 34 подключены соответственно к шинам А и В блока 5 питания, а подвижный 15 вывод 35 подключен к одному входу нуль- органа 38, к другому входу которого подключена шина О блока питания. Датчики 1 и 34 установлены соосно вдоль оси 45 с возможностью совместного движения относитель- 20 но измеряемого перемещения.
Устройство работает следующим образом. .
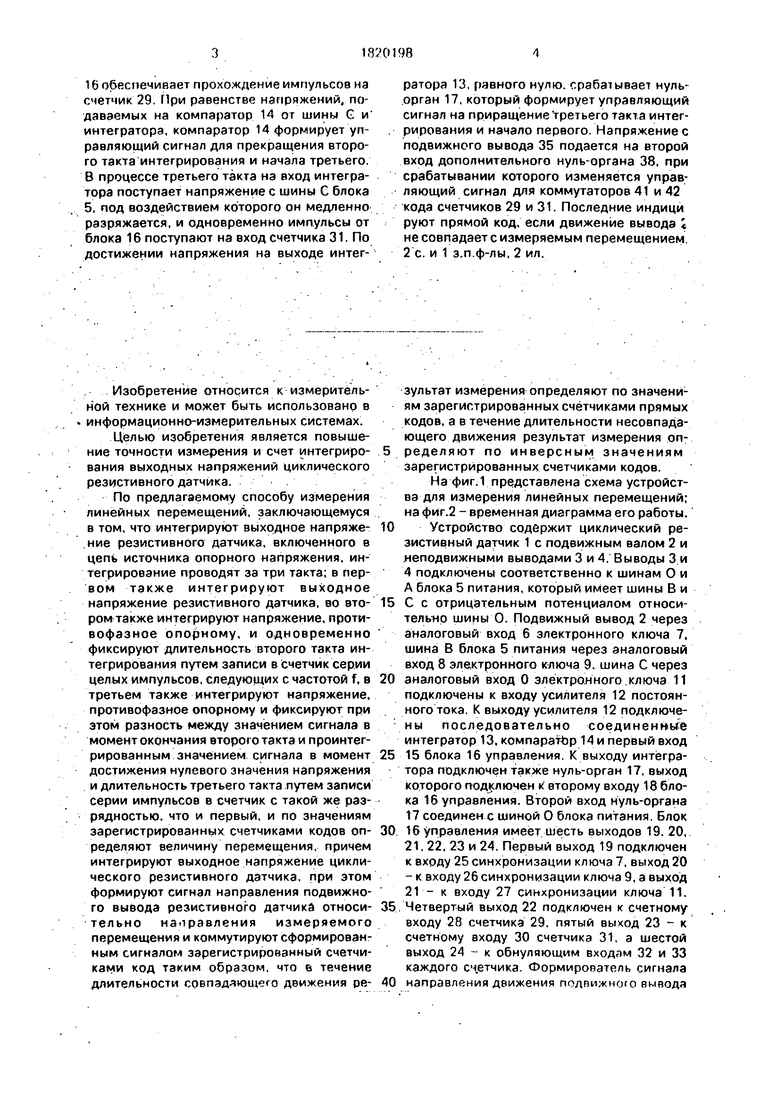
При измерении линейных перемещений подвижной вывод 2 датчика 1 совершает 25 один оборот вдоль направления измеряемого перемещения. Характер изменения напряжение выходного напряжения, снимаемого с подвижною вывода, имеет вид, представленный на фиг.2а. В моменты 30 совпадающего движения, определяющего одну половину пути, напряжение увеличивается, а при несовпадающем движении (на другой половине пути) напряжение уменьшается. Установленный соосно с датчиком 35 1 другой ци Лический датчик 34 запитан равными по величине и противофазными напряжениями, снимаемыми с шин А и В блока 5 питания. В этой связи характер напряжеиия, снимаемого с подвижного выво- 40 да 35 датчика 34, имеет вид, представленный на фиг.2 б. Как видно из , при увеличении напряжения, снимаемого с вывода 2, напряжение, снимаемое с вывода 35, больше нуля, а при уменьшении 45 напряжения, снимаемого с вывода 2, напряжение на выводе 3.5 имеет значение меньше нуля. Момент перехода нуля фиксируется дополнительным нуль-органом 38, который в моменты положительного напряжения на 50 выводе 35 выдает на своем выходе сигнал в виде логической 1. а в моменты отрицательного напряжения - в виде логического О. Указанные сигналы поступают на управляющие входы 39 и 40 двух коммутаторов. 55 осуществляя коммутацию кода, зарегистрированного счетчиками таким образом, что в моменты положительных значений напряжения, снимаемого с подвижного вывода 35, коммутатор передает на свой выход прямой код, зарегистрированный счетчиками 29 и 31, в моменты отрицательных значений напряжения, снимаемого с подвижного вывода 35, коммутатор передает на свой выход инверсный код, зарегистрированный счетчиками 29 и 31. Регистрация кода счетчиками осуществляется следующим образом. При включении питания, на выходе интегратора 13 напряжение равно нулю. На выходе 19 устанавливается напряжение логической 1, а на выходе 2 выдается кратковременный импульс, устанавливающий счетчики 29 и 31 в нулевое состояние. На выходах 20 и 21, 22-м 23 устанавливаются логические О. Напряжением логической 1 с выхода 19 при включении открывается ключ 7. Через аналоговый вход этого ключа напряжение с подвижного вывода поступает на вход усилителя 12 и далее на вход интегратора 13 (фиг.2в). Под воздействием этого напряжения интегратор заряжается до напряжения U вых (фиг.2г). Напряжение логической V на выходе 19 сохраняется в течение первого такта интегрирования. Во втором такте интегрирования, который начинается с момента сдвига логической Г1 с выхода 1S олока 16 на выход 20, ключ 7 закрывается, а ключ 9 открывается для прохождения сигналов. Через выход 8 ключа 9 и усилитель 12 на вход интегратора 13 подается напряжение с шины В (фиг.2в). Под воздействием этого напряжения интегратор начинает быстро разряжаться в течение длительного второго . такта интегрирования. Одновременно в указанный период с выхода 22 на вход счетчика 29 поступает серия импульсов с частотой f. На выходах 19, 21 и 24 в этом такте интегрирования присутствуют логические О. В момент достижения на выходе компаратора напряжения, снимаемого с шины С блока 5 питания, срабатывает компаратор 14, который выдает на вход 15 блока 16 соответствующий сигнал. После поступления этого сигнала с первым тактовым импульсом частоты f напряжение логической 1 сдвигается с выхода 20 блока 16 на выход 21. С указанного момента начинается третий такт интегрирования, состоящий в том, что напряжение шины С блока 5 питания через вход 10 ключа 11 и усилитель 12 подается на вход интегратора .13 и последний продолжает разряжаться, но со скоростью меньшей, чем во втором такте, до достижения нулевого напряжения. В третьем такте интегрирования импульсы с выхода 23 подаются на счетный вход 30 счетчика 31, а импульсы с выхода 22 на счетный вход 28 счетчика не подаются. В момент достижения нулевого напряжения срабатывает нуль-орган 17 и формирует при этом соответствующий сигнал на вход 18.блока 16 управления. Под воздействием этого сигнала с выхода 21 логическая 1 сдвигается на выход 19 и, таким образом, начинается повторное интегрирование входного сигнала и т.д., до конца работы.
Применение предложенных способа измерений линейных перемещений и устройства для его реализации обеспечивает повышение точности измерений за счет интегрирования выходных напряжений цикли ческих резистивных датчиков.
Формула-.изобретения
1. Способ измерения линейных перемещений, заключающийся в том, что интегрируют выходное напряжение резистивного датчика, включенного в цепь источника опорного напряжения, интегрирование проводят за три такта, в первом такте интегрируют выходное напряжение резистивного датчика, во втором интегрируют напряжение, противофазное опорному, и одновременно фиксируют длительность второго такта интегрирования путем записи а .счетчик серии целых импульсов, следующих с частотой f, в третьем такте интегрируют напряжение, противофазное опорному, и фиксируют при этом разность значений сигнала в момент окончания, второго такта и проинтегрированного значения сигнала в момент достижения нулевого значения напряжения и длительность третьего такта путем записи серии импульсов в счетчик с такой же разрядностью, что и первый, и по значениям зарегистрированных счетчиками кодов определяют величину перемещения, отличающийся тем, что, с целью точности измерения, интегрируют выходное напряжение циклического резистивного датчика,, при этом формируют сигнал направления движения подвижного вывода резистивного датчика относительно направления измеряемого перемещения и коммутируют сформированным сигналом зарегистрированный счетчиками код так, что в течение длительности совпадающего движения результат измерения определяют по значениям зарегистрированных счетчиком прямых кодов, а в течение длительности несовпадающего движения результат измерения определяют по инверсным значениям, зарегистрированным счетчиком кодов.
2. Устройство для измерения линейных перемещений, содержащее резистивиый датчик с подвижным выводом, двумя неподвижными соединенными с положительной и нулевой шиной блока питания выводами, блок питания, усилитель постоянного тока, интегратор, компаратор, неподвижные выводы резистивного датчика соединены соот- еетственно с положительной и нулевой
шинами блока питания, первый, второй и третий электронные ключи, нуль-орган, первым входом соединенный с ним блок управления, два m-разрядных счетчика, выходы
электронных ключей объединены и соединены с входом усилителей постоянного, тока, выход которого соединен с входом интегратора, выход последнего соединен с первыми входами нуль-органа и компаратора, выход
0 компаратора - с вторым входом блока управления, первый, второй и третий выходы которого соединены соответственно с синхронизирующими входами первого, второго и третьего электронных ключей, четвертый
5 и пятый выходы блока управления соединены соответственно с первыми входами т- разрядных счетчиков, шестой выход блока управления - с вторыми входами т-разряд- ных счетчиков, выходы которых являются
0 выходами устройства, подвижный вы вод резистивного датчика и отрицательные шины блока питания соединены соответственное аналоговыми входами первого, второго и третьего электронных ключей, а нулевая и
5 вторая отрицательная шины блока питания - соответственно с вторыми входами нуяь- органа и компаратора, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерений, оно снабжено циклическим рези0 стивным датчиком, формирователем сигнала направления движения подвижного вывода датчика относительно направления измеряемого перемещения и двумя т-раз- рядными коммутаторами кодов, выходы
5 формирователя подключены к управляющим входам коммутаторов, т- сигнальные выходы первого т-разрядного счетчика подключены к соответствующим т-сигнальным входам первого коммутатора, а т-сйгнальные
0 выходы второго т-разрядного .счетчика подключены к соответствующим т-сигнальным входам второго коммутатора.
3. Устройство по п.2, от л ич.а ю ще е - с я тем, что формирователь сигналов направ5 ления движения, подвижного вывода относительно направления измеряемого перемещения выполнен в виде второго цик- . лического резистивного датчика, подвижный вывод которого установлен соосно и с воз0 можностью совместного вращения с подвижным выводом первого резистивного датчика и второго нуль-органа, соединенных друг с другом и блоком питания так, что подвижный вывод второго резистивного датчика подклю-
5 чен к первому входу второго нуль-органа, а неподвижные выводы - соответственно к двум равным по величине противофазным шинам блока питания, при этом вход дополнительного второго нуль-органа подключен к нулевойЧшлне блока питания.
%//
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения линейных перемещений и устройство для его осуществления | 1988 |
|
SU1563729A1 |
| Способ измерения линейных перемещений и устройство для его осуществления | 1989 |
|
SU1670365A2 |
| Цифровой измеритель температуры | 1985 |
|
SU1303849A1 |
| Способ аналого-цифрового преобразования с весовым интегрированием и устройство для его реализации | 1981 |
|
SU953722A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012130C1 |
| Устройство для измерения температуры | 1978 |
|
SU800687A1 |
| Интегратор | 1982 |
|
SU1062726A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ СОВМЕЩЕННОГО ИНТЕГРИРОВАНИЯ | 1992 |
|
RU2036559C1 |
| Преобразователь выходных сигналов параметрических датчиков в код | 1986 |
|
SU1336232A1 |
| МНОГОКАНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ РЕЗИСТИВНЫХ ДАТЧИКОВ ВО ВРЕМЕННОЙ ИНТЕРВАЛ | 1994 |
|
RU2097777C1 |
Изобретение относится к измерительной технике и может быть использовано в информационно-измерительных системах. Цель изобретения - повышение точности измерения за счет интегрирования напряжения циклического резистивного датчика. После включения питания напряжение с подвижного вывода 2 через ключ 7 и усилитель 12 поступает на вход интегратора 13. Под воздействием напряжения, снимаемого с вывода 2, интегратор 13 заряжается до максимального значения. Блок 16 в период заряжения определяет длительность первого такта интегрирования, после завершения которого начинается второй такт. В этом такте вход усилителя 12 через ключ 9 соединяется с шиной В источника 5 напряжения, которое быстро разряжает интегратор. В течение быстрого разряда интегратора блок
ffi ПИИТ
Щш/з
Of
Illlliiill
Illllllllll
(putt
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный преобразователь перемещений с частотным выходом | 1982 |
|
SU1116299A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения линейных перемещений и устройство для его осуществления | 1988 |
|
SU1563729A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
