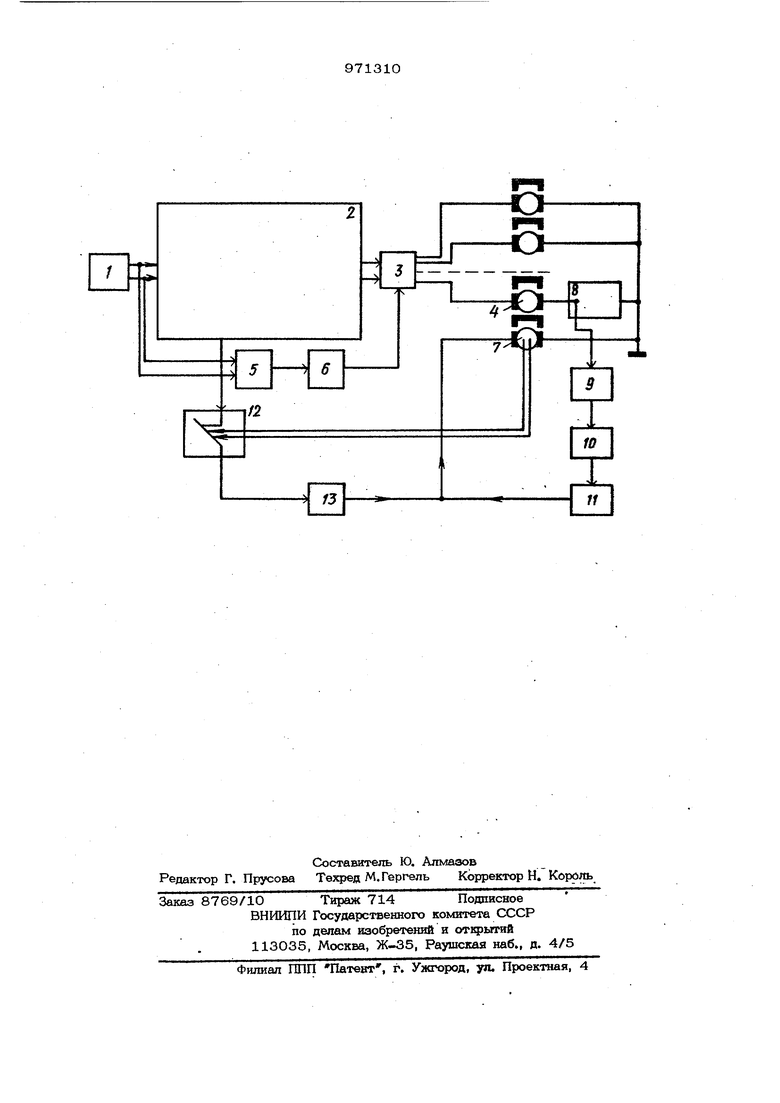
Изобретение относится к области медицинской техники, а именно к протезированию и протезостроению. Известно устройство для управления биоэлектрическими протезами, содержащее блок питания, последовательно соеди ненные блок вьщеления управляющих сигн лов, первый преобразователь, коммутирую щий блок и блок исполнительных механиз мов, включающий электропривод, а также соединенные между собой переключающий узел, вход которого подключен к выходу блока вьщеления управл5пощих сигналов, и схему выборки, выход которой подключен к блоку исполнительных механизмов, Однако для управления, например локтевым приводом протеза, требуются бо- , лее мощные приводы для обеспечения необходимой силы при управлении отведением и приведением локтя, чтоприводит к увеличению затрат электроэнергии, сокращает срок службы источника питания и утяжеляет протез. Целью изобретения является увеличение срока службы источника питания. Эта цель достигается тем, что в устройстве для управления биоэлектрическим протезом, содержащем блок питания, последовательно соединенные блок вьщеле- ния управл5пощих сигналов, первый преобразователь, коммутирующий блок и блок исполнительных механизмов, включающий электропривод, а также соединенные между собой переключающий узел, вход которо го подключен к выходу блока вьщеления управляющих сигналов, и схему выборки, выход которой подключен к блоку исполнительных механизмов, введены дополнительные электропр1гводы, установленные в блоке исполнительных механизмов, блок управления, содержащий последовательно соединенные датчик перегрузок, подключенный к выходу блока исполнительных механизмов, линия задержки, первый усилитель и вторюй преобразователь, а также узел коммутации, содержащий соединенные между собой выключатель и второй усилитель, соединенные с блоком ис. полнительных механизмов и вторым преобразователем, при этом выключатель соединен с первым преобразов-ателем. На чертеже изображена структурная схема устройства для управления биоэлек трическим протезом. Устройство содержит блок питания (не показш), последовательно соединенные блок 1 вьщеления управляющих сигналов, первый преобразователе. 2, коммутирующий блок 3, блок исполнительных мехтшзмов, включающий электропривод 4, а такясе соединенные между собой переключающий узел 5, вход которого подключен к выходу блока 1 выделения управляю1Щ1х сигналов, схему 6 выборки, дополнительный электропривод 7, установ ленный в блоке исполн 1 тельных: механизмов, блок управления, содержс1щий последовательно соединенные датчик 8 перегр зок, под1шюченный к выходу блока испол нительных механизмов, линия 9 задержки первый усилитешт 1О и второй преобразо ватель 11, а также узел коммутации, содер){са11Шй соединенные между собой выключатель 12 и второй усилитель 13, соединенные с блоком исполнительных механизмов и вторьте преобразователем 11, при этом выключатель 12 соединен с первым преобразователем 2. Устройство работает следующ образом. Электропривод 4 управляет локтевым механизмом и обеспечивает cj- ибаниеразгибание его при поднятии легких (2-3 кг) предметов. При поднятии тяжелых предметов и одновременном сгибании локтевого механизма электропривод 4 не обеспечивает необхо,димой силы для выполнения действия. В редукторе |прИБода действуют силы торможения, поэтому в электрической цепи электропривода 4 возникает повышеш ый ток, которьа с датчика 8 перегрузок передается через линию 9 задержки, усилз-гтель 10 и преобразователь 11 на допо1шит§ль ный электропривод 7, который обеспечивает параллельную с электроприводом 4 работу при вьшолнении сгибания локтевого механизма. При вьшолнении разгибани локтевого механизма сигнал с выхода первохх) преобразователя 2 нормально замкнутый кнопочный (концевой) выключатель 12 и усилитель 13 передается на электропривод 7. При достижении редуктором электропривода 7 крайнего положения, кнопочный выключатель 12 устанавливается в разомкнутое состояние, в результате чего электропривод 7 выключается из цепи разгибания Локтевого механизма. Предложенное устройство позволяет в наиболее жесткие режимы работы подключать параллельно к основному электроприводу, выполняющему движение, дополнительный электропривод, чем экономится энергия источника питания, то есть увеличивается его срок службы. Формула изобретения Устройство для управления биоэлектрическим протезом, содержащее блок питания, последовательно соединенные блок вьзделения управляющих сигналов, первый преобразователь, коммутирующий блок и блок исполнительных механизмов, включающий электроприводы, а также соединенные между собой переключающий узел, вход которого подключен к выходу блока выделения управляющих сигналов, и схему выборки, выход которой подключен к блоку исполнительных механизмов, отличающееся тем, что, с целью увеличения срока службы источника питания, в него введены дополнительный электропривод, установленный в блоке исполнительных механизмов, блок управления, содержащий последовательно соединенные датчик перегрузок, подключенньШ к выходу блока исполнительных механизмов, линия задержки, первый усилитель и второй преобразователь, а также узел коммутации, содержащий соединенные между собой выключатель и второй усилитель, соединенные с блоком исполнительных механизмов и вторым преобразователем, при этом выключатель соединен с первым преобразователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическими протезами | 1979 |
|
SU822405A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| ПРОТЕЗ ГОЛЕНИ | 2019 |
|
RU2695948C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ БИОЭЛЕКТРИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ | 1967 |
|
SU196249A1 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |