1
Изобретение относится к промышленности строительных материалов, в частности к оборудованию эаво- дов стеклянного волокна.
Известно приспособление для подсекания нитей., включающее рычаг с пальцем и пружиной, свободная часть которого выполнена в виде ломаной
линии Г1 1Наиболее близким техническим решением к предлагаемому по техническо сущности и достигаемому результату является механизм перезаправки нити, включающий бобинодержатели, смонтированные на поворотном столе, заправочные пальцы и привод 2. В. известных механизмах стол с укрепленными на нем бобинодерж-ателями при автоматической перез правк.е поворачивается на угол 180 .
:Одновременно с этим рщчаг с заправочным пальцем совершает неполный оборот относительно бобины, увели-чивая тем самым угол охвата нитью
.поверхности бобины.
Недостатками известного механизма являются ненадежность перезаправки нити, объясняющаяся тем, что нит при каждом повороте стола соприкасается с пальцем на одном и том же
узком участке. Вследствие большой абразивности стеклянной нити, перемещающейся с.большой линейной скоростью, поверхность заправочного пальца скоро прорезается нитью. При Этом образуются заусенцы, соприкасаясь с которыми нить повреждается и преждевременно обрывается когда она еще не обогнула бобину
0 на максимальный угол. Перезаправка нити по данной причине на резервную бобину не происходит. Кроме того, рычаг с пальцем смонтирован на валу электродвигателя, связанного с механизмом управления сменой бо5бин.
Целью изобретения является увеличение срока службы.
Поставленная цель достигается тем,
0 что механизм для перезаправки нити, . включающий, бобинодержатели,смонтированные на поворотном столе, заправочные пальцы и привод, снабжен кронштейнами, установленны.ми с возмож-.
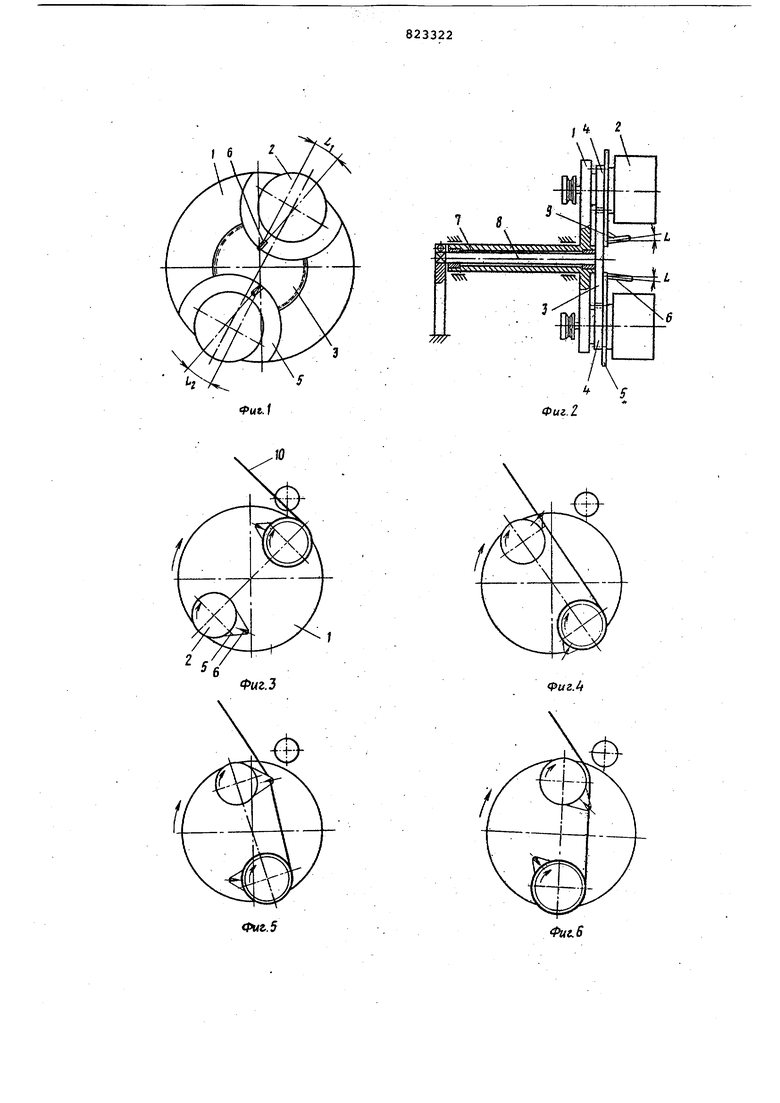
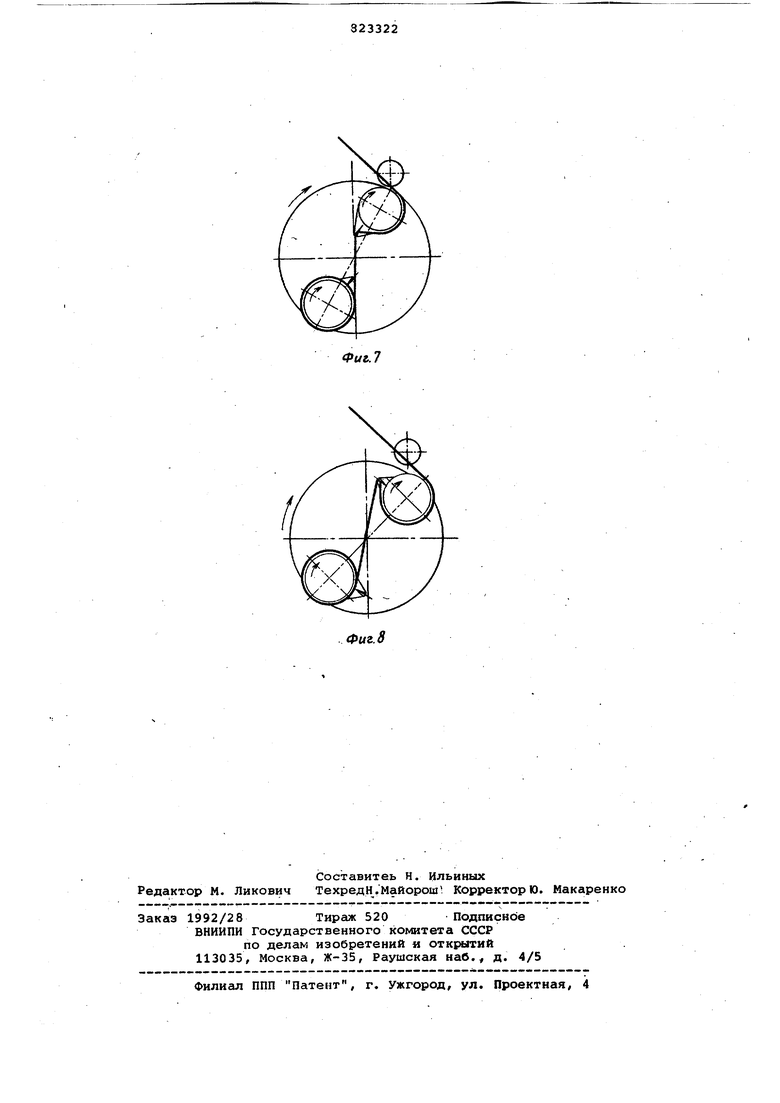
5 ностью вращения от привода, а заправочные пальцы укреплены наклонно к ося1 бобинодержателей. При этом наклон заправочных пальцев в вертикальной плоскости составляет 6-12, а к горизонтальной плоскости 4-8°, а механизм снабжен режущими элементами, устано ленными в основании загрузочных пал цев. При углах, превышающих указанные пределы, произойдет увеличение габаритов механизма, что повлечет дополнительные затраты по расширению производственных площадей. При углах менее указанных пределов не произойдет скольжения нити по поверхности пальца, что приводит к нарушению поверхности его вследст вие прорезания металла, образования заусенцев и обрыву нити. .Интервал указанных пределов механизма обеспечивает надежную перезаправку нити. На фиг.1 изображен общий вид механизма, вид спереди; на фиг.2 - то же, вид сбоку; на фиг.З - положе.ние заправочного пальца в конце цикла намотки нити на бобину (исходное положение) , на фиг. 4 - то же, в момент его касания с нитью на фйг. то же, в момент натяжения нити внешней поверхностью пальца; на фиг.6 то же в момент захода нити под него; на фиг.7 - то же, в момент натяжения нити внутренней поверхностью пальца; на. фиг,8 - то же, в момент максимального натяжения и обрыва ни «Механизм для перезаправки нити содержит поворотный стол 1 с бобинодержателями 2, центральную неподвижную шестерню 3, ведомые шестерни 4, кронштейны 5 с заправочными пальцами б, полый вал 7,ось 8 и режущий элемент 9. На полом валу 7 закреплен поворот ный стол 1 с бобинодержателями 2. Через сквозное отверстие вала 7 вставлена ось 8,на одном конце кото рой укреплена центральная шестерня 3, на втором конце.- зажимной хомут с вилкой, предназначенный для фиксации оси 8 в неподвижном состоянии. На корпусе подшипников бобинодержателей 2, укрепленных на поворотном столе 1 наматывающего аппарата, посаЯсены ведомые шестерни 4 с кронштейнами 5, на которых жестко укреплены пальцы б, непосредственно взаимодействующие с нитью 10. Кронштейны 5 неподвижно скреплены с шестер- нями 4, последние находятся в зацепЛенин с центральной шестерней 3, при чем передаточное отношение шестерен 4 к шестерне 3 составляет 1:2. Механизм работает следующим обра зом. После окончания цикла намотки нит 10 на бобину (фиг.З) стол 1 .начинает поворачиваться по часовой стрелке. ведомые шестерни 4, находящиеся в зацеплении с центральной неподвижной шестерней 3, при этом обкатываются п ней и поворачивают кронштейны 5 с заправочными пальцами б также по часовой стрелке на некоторый угол.При достижении столом 1 угла поворота 90-100 заправочный палец б резервной бобины вступает во взаимодействие с вытягиваемой нитью 10 (фиг.4) . Первоначально нить 10 ложится на внешнюю поверхность заправочного пальца б и под силой натяжения скользит по наклонной его поверхности в сторону от стола 1 фиг.З Обогнув торец пальца 6, нить 10 заходит под него- фиг.6 , некоторое время не взаимодействуя с ним. При дальнейшем повороте стола 1 и бобины нить 10, касаясь пальца, под силой натяжения фиг.7 начинает перемещаться вдоль бобины противоположном направлениии в сторону стола-. При этом заправочный палец б увлекает нить 10, скользящую по нему, в верхнее воложение. В самом крайней верхнем положении пальца б, когда стол 1 повернется на 180 фиг.8 , нить 10 набега«т на режущий элемент 9, который и обрывает ее. В этот момент свободный конец нити 10 подхватывается резервной бобиной и наматывается на нее. Таким образом, нить 10, взаимодействуя с заправочным пальцем б,не разрушает его поверхность и обрыв ее осуществляется в самом крайнем положении пальца, т.е. когда нить обогнет бобину на максимальный угол. Такое выполнение механизма упрощает его конструкцию, увеличивает срок службы и обеспечивает более надеж- ную перезаправку нити на резервную 5об-ину. .. предлагаемая конструкция механизма для перезаправки нити упрощена, в ней отсутствует электропривод, который заменен шестеренчатой передачей. Формула изобретения 1.Механизм для перезаправки нити, включающий бобинодержатели, смонти- рованные на поворотном столе, заправочные пальцы и привод, о т л и ч аю щ и и с я тем, что, с целью увеличения срока службы, он снабжен кронштейнами , установленными с возможностью вращения от привода, а заправочные пальцы укреплены наклонно к осям бобинрдержателей. 2.Механизм по п.1, о, т л и ч а ю щ и и с я тем, что заправочные пальцы укреплены к вертикальной плоскости под углом 6-12 , а к горизонталь ной плоскости 4-8 . 3.Механизм по п.1, отличающий с я тем, что он снабжен ре- J жущими элементами; установленными в основании загрузочных пальцев. Источники информации, , принятые во внимание при экспертизе.1. Авторское свидетельство СССР № 355108, кл. С 03 В 37/00, 1970. 2. Авторское свидетельство СССР . № 152287, кл,- С 03 В 37/00, 1961.
I 6i.
,
«Put./
M
7 Г
AvV%WvWbWVK XVX%X4 44y
§
wЛ.
Фиг. 2
.lt
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перезаправки мотальной машины с многоместными бобинодержателями и устройство для его осуществления | 1980 |
|
SU925825A1 |
| Устройство для перезаправки нити | 1985 |
|
SU1278311A1 |
| Способ перезаправки параллельных многоместных бобинодержателей мотальной машины и механизм перезаправки параллельных многоместных бобинодержателей мотальной машины | 1983 |
|
SU1139687A1 |
| Устройство для перезаправки нити | 1987 |
|
SU1446120A1 |
| Устройство для непрерывной намотки нити | 1982 |
|
SU1110733A1 |
| Устройство для перезаправки револьверной мотальной головки | 1989 |
|
SU1662914A1 |
| Устройство для намотки нитевидного материала | 1984 |
|
SU1234329A1 |
| Прядильная машина для синтетических волокон | 1957 |
|
SU113825A1 |
| Устройство для намотки нитевидного материала | 1985 |
|
SU1284922A1 |
| Устройство для перезаправки мотальной машины | 1980 |
|
SU927704A1 |