. . .. ,. Г... ....,., : ,.,
ИзоЬретенйё относится к техничесКИМ измерениям в машиностроении, а именно к устройствам дав контроля кинематической погрешности механизмов. .....; , ,. - ;..
Известно устройство для контроля кинематической norpeiffliости зубчатых передач/ содеркгццее оптические датчики углов поворота начального и конечного звеньев контролируемой передачи, заыхЬда которых соединены с фазоизмёрительной схемой, которая связана с регистрирующим прибором Ш. Наиболее близким к предлагаемрму является устройство для контроля кинематической погрешности механизмов, содержащее датчики углов поворота начгшьного и конечного звеньев контролируемого механизма, к выходам которых последовательно подключены полосовые фильтры, усилители-Формирователи и амплитудно-импульсные пре образователи, соединенные с входами фазометра, блок совмещения, включенный между одним из фазстютрв и амплитудно-импульсными преобразователями конечного звена, фазовращатель , привод и двигатель фазовращателя и источником питания, синхронизатор, блок кратности и сумматор.
входы которого через инвертор и без ; него свйзаны с входами амплитудноимпульсных преобразователей, .а выход фазометра соединен с регистрирующим прибором 2
Основным недостатком этих устройств является низкая точность контроля, обусловле1Шая нестабильностью скорости вращения привода.
Цель изобретения - повышение точности контроля.
Поставленная цель достигается тем, что датчик угла поворота конечного звена выполнен в виде оптического фазовращателя с считывающим блоком, соединенным Через амплитудно-импульсный преобразователь и блок совмещения с одним из входов фазометра, и двумя растровыми дисками, один из которых закрепляется на конечном звене контролируемого механизма, а другой жестко связан с валом двигателя фазовращателя, синхронизированного по скорости вращения с приводом.
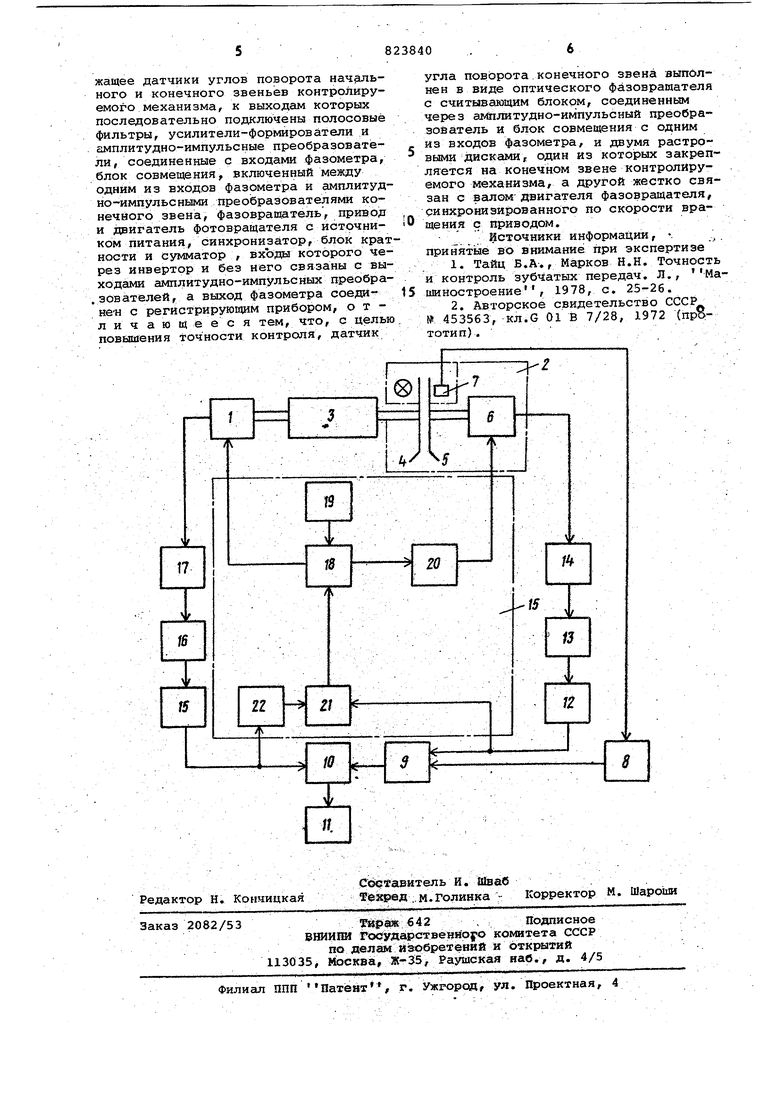
На чертеже показана структурная схема устройства.
Устройство содержит датчик 1 и 2 углов поворота начального и конечного звеньев контролируемого механизма 3.Датчик 1 является приводом механизма 3, а датчик 2 выполнен в виде оптического фазовращателя с растровь 4и дисками 4 и 5. Растровый диск 4 соединён с конечным звеном механизма 3. Диск 5 жестко связан с валом двигателя б. Фотоэлектрический считывающий блок 7 через амплитудно-импульсный преобразователь 8 и блок совмещения 9 соединен с одним из входов фазометра 10, выход которого связан с регистрирующим прибором 11. Этот же вход фазометра 10 через блок совмещения 9, амплитудно.импульсный преобразователь 12, усили ель-формирОватель 13 и полосовой фильтр 14 связан с обмоткой питания двигателя б. Другой вход фазометра 10 через амплитудно-ик}пульсный преобразователь 15, усилитель-формиро-, ватель 16 и полосовой фильтр 17 присоединен к обмотке питания датчика угла 1. Обмотка питания датчика угла 1 через синхронизатор 18 подключена к источнику 19 питания, а обМотка питания двигателя б подключена к источнику 19 через синхронизатор 18 и блок кратности 20. Синхронизатор 18 связан с выходом сумматора 21, один из входов которого через инвертор 22 .соединен с выходом амплитудно-импульсного преобразователя 15 начального звена, а другой,вход соединен с выходом амплитудно-импульсного преобразователя 12 конечного звена.
Устройство работает следующим образом.
При вращении датчика 1 из-за пазовости якоря, в его обмотках модулируется переменное напряжение с частотой зубцовых пульсаций, пропорциональное скорости вращения датчика угла 1, Выделенный из обмотки сигнал через полосовой фильтр 17, срезающий все частоты, кроме частоты зубдовых пульсаций, преобразуется усилителемформиров&телем 16 в посл :довательность импульсов прямоугольной формы. Полученная последовательности импульсов преобразуется амплитудно-импульсным Преобразователем 15 в постоян9.00 напряжение, пропорциональное периоду следования импульсов и постуIпает на один из входов фазометра 10. На другой вход.фазометра 10 через блок сЬвмещения 9 поступает сигнал , являющийся суммарным или разностным двух сигналов. На один вход блока
совмещения 9 через амплитудно импульсный преобразователь 12, усилительФор «шрователь 13 и полосовой фильтр 14 поступает сигнал с частотой зубцовых пульсаций двигателя 6. На другой его вход через амплитудно-импульсный преобразователь 8 поступает сигнал от считывающего блока 7.
Оптический фазовращатель используется в качестве масшта.бного преобразователя разности фаз взаимоположения начального и конечного звень- ев механизма 3, возникающей вследствие наличия у него кинематических ошибок. Растровый диск 5, соединенный с валом двигателя б, синхронизированного по частоте вращения с датчиком угла 1, модулирует световой поток, создаваемый источником света считывающего блока.7, а растровый диск 4 прерывает этот световой поток
0 в соответствии с изменением скорости вращения конечного звена механизма 3. Тем самым изменяется период следования импульсов фототока считывающего 7 и пропорционально этому в такт 5 изменяется иекущее значение разности фаз между сигнгшами датчиков 1,и 2 углов поворота - начального и конечного звеньев контролируемого механизма 3. Сигнал, пропорциональный разности фаз и соответствующий характеру изменения Кинематической погрешности, с выхода фазометра поступает на .регистрирующий прибор 11.
С целью исключения погрешности измерения, вызываемойрассинхрониза5 цией частот врйщёния датчика угла 1 и двигателя б, в устройство введена обратная .связь, включающая амплитудно-импульсные преобразователи 12 и 15, инвертор 22 и сумматор 21, работающая следующим образом.
Сигналы, выделенные с обмоток датчика 1 и двигателя 6 с частотой зубцовых пульсаций с помощью полосовых фильтров 14 и 17, усилителейформирователей 13 и 16 и амплитудноимпульсных преобразователей 12 и 15 преобразуются в постоянное напряжение, пропорциональное периоду следования сигналов. Эти напряжения поступают на входы сумматора 21 в противоположной полярности, что достига. ется включением инвертора 22. На выходе сумматора 21 появляется сигнал рассинхронизаЦии, который подаётся
5 на вход синхронизатора 1В. Синхронизатор учитывает эту величину и полярность и приводит устройство в требуемый синхронный режим работы .датчика 1 и двигателя 7.
Предлагаемое устройство позволяет провести йзме|зения практически с любой требуемой погрешностью независимо от скорости вращения выходного звена и с весьма высокой чувстf вительностью, так.как регулирование скорости вращения д&игателя фазовращателя в широких пределах позволяет значительно изменять разрешающую Способность и чувствительность оптического фазовращателя.
Формула изобретения
Устройство для контроля кинематической погрешности механизмов, содержащее датчики углов поворота начального и конечного звеньев контролируемого механизма, к выходам которых последовательно подключены полосовые фильтры, усилители-формирователи и амплитудно-импульсные преобразователи , соединенные с входами фазометра, блок совмещения, включенный между одним из входов фазометра и амплитудно-импульсными преобразователями конечного звена, фазовращатель, привод и даигатель фотовращателя с источником питания, синхронизатор, блок крат ности и сумматор , входа которого через инвертор и без него связаны с выходами амплитудно-импульсных преобра.зователей, а выход фазометра соедйнен с регистрирующим прибором, отличающееся тем, что, с целью повышения точности контроля, датчик угла поворота.конечного звена выполнен в виде оптического фазоврашателя с считывающим блоком, соединенным через аи литудно-импульсный преобразователь и блок совмещения с одним из входов фазометра, и двумя растровыми дисками, один из которых закрепляется на конечном звене контролируемого механизма/ а другой жестко связан с валом-двигателя фазовращателя, синхронизированного по скорости вращения с ЙРИВОДОМ. Источники информации, . принятые во внимание при экспертизе 1.Тайц Б.А., Марков Н.Н. Точность и контроль зубчатых передач. Л., Мапшностроение , 1978, с. 25-26. 2.Авторское свидетельство СССР №453563, 01 В 7/28, 1972 (прВ;тотип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности механизмов | 1980 |
|
SU962760A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ МЕХАНИЗМОВ | 1963 |
|
SU453563A1 |
| Способ измерения кинематической погрешности передач | 1981 |
|
SU998853A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1021936A1 |
| Устройство для контроля преобразователя угла поворота вала в код | 1988 |
|
SU1589391A1 |
| Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1656681A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Устройство измерения перемещения | 1982 |
|
SU1334045A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1976 |
|
SU574605A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙПЕРЕДАЧ | 1967 |
|
SU198708A1 |
