Изобретение относится к машинот строению, а именно к измерению зубчатых передач.
Известен способ контроля кинематической погрешности передачи, заключающийся в том, что движения звеньев механизма преобразуют в последовательность импульсов и определяют их относительный фазовый сдвиг.
Используя полосовые фильтры, выIделяют гармоническуй составляющую кинематической погрешности ll.
Недостатком указанного способа является низкая точность определения амплитуды из-за ограниченной разрешающей способности ПС1ЛОСОВЫХ фильтров.
Наиболее близким по технич(.ской сущности к изобретению является способ измерения кинематической погрешности передач, заключающийся в тсж, что углы поворота начального и конечного звеньев передачи преобразуют в последовательность импульсов,, определяют их относительный фазовый сдвиг, выделяют гармоническую составля1с1и1ую кинематической погрешности и определяют ее амплитуду с использованием анализаторов спектра последователоного или параллельного деисту ВИЯ 1,2.
Недостатком известного способа является невысокая точность определения амплитуды гармонической составляющей в связи с расширением полосы пропускания фильтров анализатора из-за колебания диапазона погрешности контролируемой кинемати10ческой погрешности.
Цель изобретения - повышение точности измерения.
Поставленная цель достигается тем, что согласно способу измерения кине15матической погрешности передачи, заключающемуся в том, что углы поворота начального и конечного звеньев передачи преобразуют в последовательность импульсов, определяют их
20 относительный фазоый сдвиг, выделяют гармоническую составляющую Погрешности и определяют ее амплитуду, количество шлпульсов конечного ( тихоходного ) звена передачи, в которые
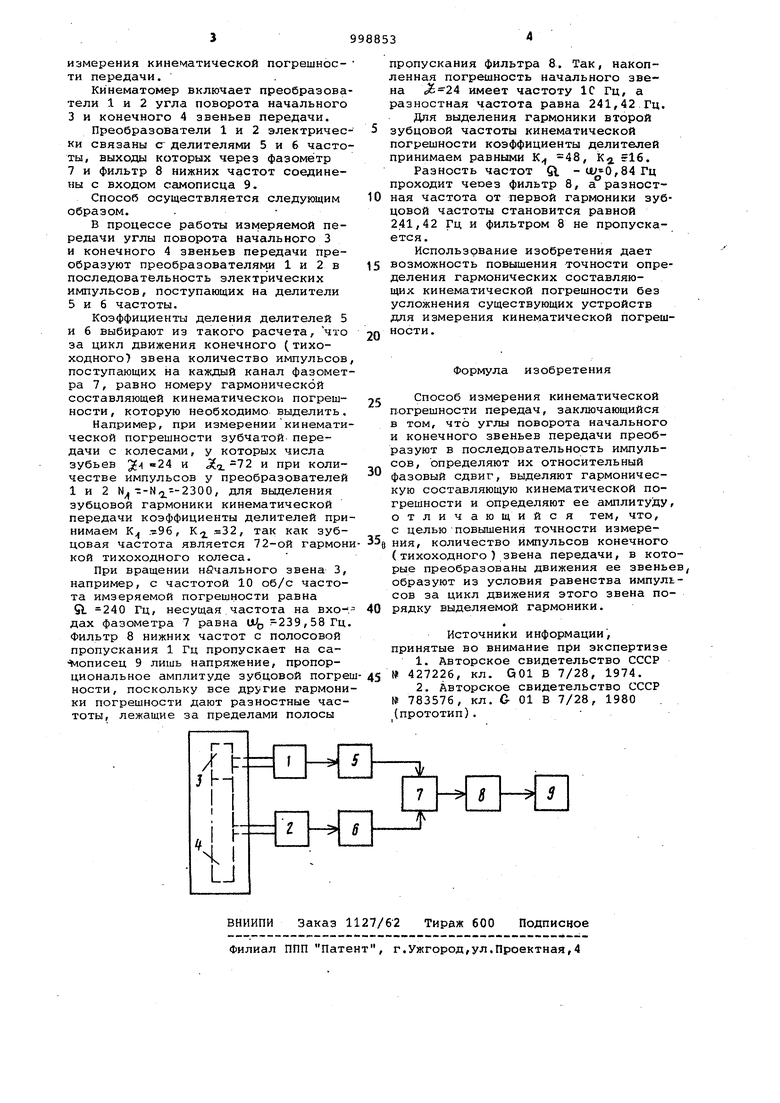
25 преобразованы движения ее звеньев, образуют из условия равенства импульсов за цикл движения зтого звена порядку выделяемой гармоники. . На чертеже изображена блок-схема
30 кинематомера, реализующая способ :
измерения кинематической погрешнеети передачи,
Кинематомер включает преобразователи 1 и 2 угла поворота начального 3 и конечного 4 звеньев передачи.
Преобразователи 1 и 2 электрически связаны с делителями 5 и 6 частоты, выходы которых через фазометр 7 и фильтр 8 нижних частот соединены с входом самописца 9.
Способ осуществляется следующим образом. .
В процессе работы измеряемой передачи углы поворота начального 3 и конечного 4 звеньев передачи преобразуют преобразователями 1 и 2 в последовательность электрических импульсов, поступающих на делители 5 и б частоты.
Коэффициенты деления делителей 5 и 6 выбирают из такого расчета, что за цикл движения конечного (тихоходного) звена количество импульсов поступающих на каждый канал фазометра 7, равно номеру гармонической составляющей кинематической погрешности , которую необходимо выделить.
Например, при измерении кинематической погрешности зубчатой передачи с колесами, у которых числа зубьев ц 24 и jf 72 и при количестве импульсов у преобразователей 1 и 2 N --N --2300, для выделения зубцовой гармоники кинематической передачи коэффициенты делителей принимаем К ,, К ., так как зубцовая частота является 72-ой гармоникой тихоходного колеса.
При вращении нбчального звена 3, например, с частотой 10 об/с частота имзеряемой погрешности равна 51 240 Гц, несущая частота на вхо-.дах фазометра 7 равна ifo -239,58 Гц. Фильтр 8 нижних частот с полосовой пропускания 1 Гц пропускает на саЧ описец 9 лишь напряжение, пропорциональное амплитуде зубцовой погрешности, поскольку все другие гармоники погрешности дают разностные частоты, лежащие за пределами полосы
пропускания фильтра 8. Так, накопленная погрешность начального звена имеет частоту 1C Гц, а разностная частота равна 241,42 Гц.
Для выделения гармоники второй зубцовой частоты кинематической погрешности коэффициенты делителей принимаем равными К 48, К. 516.
Разность частот Q. - ,84 Гц проходит чеоез фильтр 8, а°разност0 ная Частота от первой гармоники зубцовой частоты становится равной 241,42 Гц и фильтром 8 не пропускается.
Использование изобретения дает 5 возможность повышения точности определения гармонических составляющих кинематической погрешности без усложнения существующих устройств для измерения кинематической погрешности.
Формула изобретения
Способ измерения кинематической погрешности передач, заключающийся в том, что углы поворота начального и конечного звеньев передачи преобразуют в последовательность импульсов, определяют их относительный фазовый сдвиг, выделяют гармоническую составляющую кинематической погрешности и определяют ее амплитуду, отличающийся тем, что, с целью повышения точности измереЗц ния, количество импульсов конечного (тихоходного ) звена передачи, в которые преобразованы движения ее звеньев, образуют из условия равенства импульсов за цикл движения этого звена по0 рядку выделяемой гармоники.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 427226, кл. G01 В 7/28, 1974.
2.Авторское свидетельство СССР № 783576, кл. G 01 В 7/28, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Способ активного контроля кинематической погрешности зубчатого колеса | 1986 |
|
SU1445873A1 |
| Способ определения погрешностей зубчатых колес | 1981 |
|
SU991147A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| Кинематомер | 1982 |
|
SU1097894A1 |
| Устройство для измерения гармоническихСОСТАВляющиХ КиНЕМАТичЕСКОй пОгРЕшНОСТизубчАТыХ пЕРЕдАч | 1979 |
|
SU815481A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1976 |
|
SU574605A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
