1
Известно устройство для контроля кинематической точности механизмов, основанное на принципе сравнения фаз сигналов датчиков, и содержащее датчики, моментную муфту, электроизмерительную схему и регистрирующий (показывающий) прибор.
Предложенное устройство отличается от известного тем, что один из датчиков выполнен фотоэлектрическим модуляционным с двумя растровыми дисками и двумя считывающими головками - подвижной, связанной с выходным валом проверяемого механизма, и неподвижной, закрепленной на корпусе датчика. Второй датчик выполнен в виде емкостного фазовращателя, ротор которого связан с входным звеном контролируемого механизма, а статор питается напряжением, генерируемым неподвижной головкой модуляционного фотоэлектрического датчика через фазовращатель.
Кроме того, плоскости щтрихов растровых дисков совмещены с плоскостями подшипников ротора, а модуляционный датчик связан с механизмом через моментную муфту, передающую только угловые перемещения.
Такое выполнение устройства позволяет повысить точность контроля передач механизмов, устранить погрешность, связанную с несоосностью вала ротора фотоэлектрического модуляционного датчика и его выходного вала, а также исключить влияние на точность измерения эксцентриситета выходного вала фотоэлектрического модуляционного датчика относительно выходного вала контролируемого механизма.
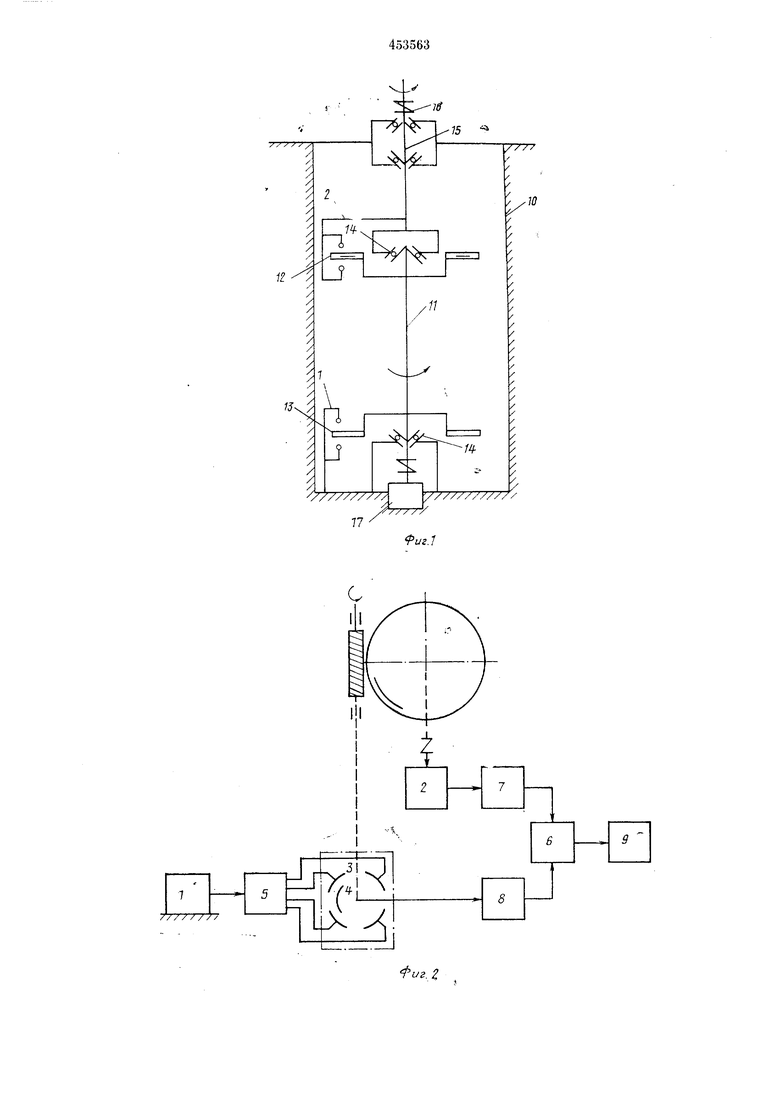
На фиг. 1 изображена кинематическая схема модуляционного датчика; на фиг. 2 -
электрическая блок-схема устройства.
Устройство для контроля кинематической точности механизмов, основанное на принципе сравнения фаз сигналов датчиков, связываемых с выходным и входным звеньями проверяемого механизма, содержит два датчика, один из которых выполнен модуляционным с неподвижной и подвижной головками 1 и 2, соответственно связанными с корпусом датчика и с выходным валом проверяемого механизма. Второй датчик выполнен в виде емкостного фазовращателя 3, ротор 4 которого связан с входным звеном контролируемого механизма, а статор питается через фазорасщепитель 5 напряжением, генерируемым неподвижной головкой 1 модуляционного фотоэлектрического датчика, фазометром б, на котором сравниваются сигналы ротора 4 фазовращателя 3 и сигналы подвижной головки 2, фильтров 7 и 8 и регистрирующего прибора 9.
Модуляционный фотоэлектрический датчик выполнен п тзпде корпуса 10, в котором разметаются быстро вращающийся ротор 11 с двумя растровыми дисками 12 и 13, причем щтрихи дисков расиоложеиы в плоскости подщипников 14 ротора 11. Кроме того, датчик содержит выходной вал 15 и две фотоэлектрические головки 1 и 2, одна из которых крепится неподвижной на корпусе 10 датчика, а вторая (подвижная) на кронштейне, являющимся частью выходного вала 15, на котором крепится моментная муфта 16, предназначенная для связи датчика с проверяемым механизмом и передающая только вращательное движение. Ротор 11 датчика приводится во вращение от электродвигателя 17 с относительно больщой скоростью, например, 3000 об/мин.
Предлагаемое устройство работает следующим образом.
Моментная муфта связывается с выходным звеном проверяемого механизма, например, со столом зубофрезерного станка, а емкостный фазовращатель - с выходным звеном, например, с червяком делительной пары стола.
Отношение числа штрихов растровых дисков к числу полюсов емкостного фазовращателя должно быть равно передаточному числу проверяемого механизма.
Сигнал, генерируемый неподвижной головкой 1 модуляционного датчика, проходит через фазорасщепитель 5 и полученные в нем четыре сигнала, сдвинутые друг относительно друга по фазе на 90°, используются для питания статора емкостного фазовращателя 3. Сигнал ротора 4 фазовращателя сравнивается по фазе с сигналом, генерируемым подвижной головкой 2 модуляционного датчика.
При наличии кинематических ошибок проверяемой передачи, фазы сравниваемых сигналов рассогласовываются, и на выходе фазометра появляется пропорциональное рассогласованию напряжение, используемое для управления регистрирующим прибором 9.
Предмет изобретения
1.Устройство для контроля кинематической точности механизмов, основанное на принципе сравнения фаз сигналов датчиков, содержащее датчики, моментную муфту, электроизмерительную схему и регистрирующий (показывающий) прибор, отличающееся тем, что, с целью повышения точности контроля передач механизмов, один из датчиков
5 выполнен фотоэлектрическим модуляционным с двумя растровыми дисками и двумя считывающими головками - подвижной, связанной с выходным валом проверяемого механизма, и неподвижной, закрепленной на корпусе датчика, а второй датчик выполнен в виде емкостного фазовращателя, ротор которого связан с входным звеном контролируемого механизма, а статор питается напряжением, генерируемым неподвижной головкой модуляционного фотоэлектрического датчика через фазовращатель.
2.Устройство по п. 1, отличающееся тем, что, с целью устранения погрешности, связанной с несоосностью вала ротора фотоэлектрического модуляционного датчика и его выходного вала, плоскости штрихов растровых дисков совмещены с плоскостями подшипников ротора.
3.Устройство по пи. 1и2, отличающее5 с я тем, что, с целью исключения влияния на
точность измерения эксцентриситета выходного вала фотоэлектрического .модуляционного датчика относительно выходного вала контролируемого механизма, модуляционный 0 датчик связан с механизмом через момептную муфту, передающую только угловые перемещения.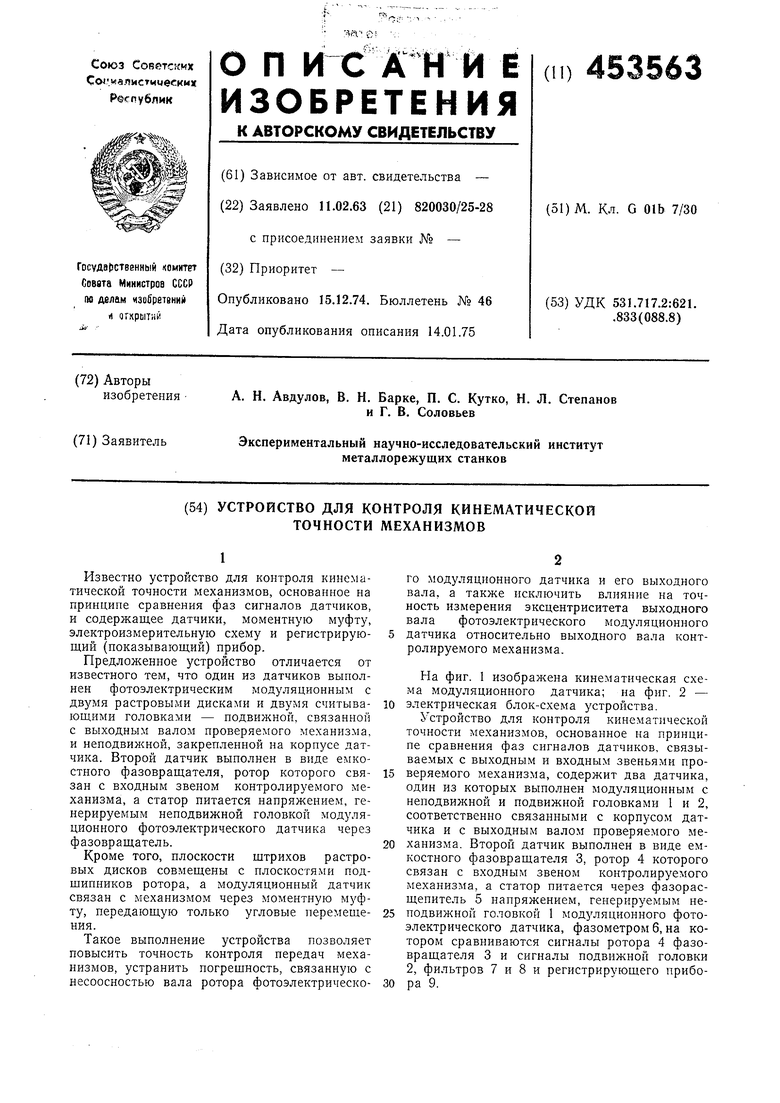
| название | год | авторы | номер документа |
|---|---|---|---|
| КИНЕМАТОМЕР | 1969 |
|
SU238177A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ КИНЕМАТИЧЕСКОЙ ЦЕПИ | 1968 |
|
SU221783A1 |
| Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1656681A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОШИБКИ УГЛА ПОВОРОТА | 1965 |
|
SU223383A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU963034A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ-КОД | 1972 |
|
SU334580A1 |
| СПОСОБ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ МЕХАНИЗМОВ СЛЕДЯЩИХ СИСТЕМ | 1970 |
|
SU263439A1 |