(З) УСТРОЙСТВО /1ЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ МЕХАНИЗМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙПЕРЕДАЧ | 1967 |
|
SU198708A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ МЕХАНИЗМОВ | 1963 |
|
SU453563A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1976 |
|
SU574605A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1656681A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1021936A1 |
| Способ контроля кинематической погрешности передач | 1981 |
|
SU977941A1 |
1
Изобретение относится к техничес КИМ измерениям в машиностроении, а именно к устройствам для контроля кинематической погрешности механизмов.
Известно устройство для контроля кинематической погрешности, передач, содержащее датчики углов поворота начального и конечного звеньев контролируемой передачи и подключенные , к выходам датчиков делители частоты, соединенные.с фазометром
Наиболее близким к предлагае «эму по технической сущности и достигаемому эффекту является устройство 5 для контроля кинематической погрешности механизмов, содержащее фотоэлектрические ,датчики углов поворота начального и конечного звеньев контролируемого механизма с двумя считы- 20 вающими головками, одна из которых соединяется с подвижными звеньями механизма, другая установлена относительно нее неподвижно, делители
частоты, фазометр с подключенными к его входу считывающими головками датчика углов поворота начального звена и соединенный с выходом фазометра регистрирующий прибор 2 ;.
Недостаток известных устройч тв состоит в невысокой точности контроля высокочастотных составляющих кинематической погрешности, обусловленной низкой дискретностью импульсов, снимаемых с датчиков углов поворота.
Цель изобретения - повышение точности контроля.
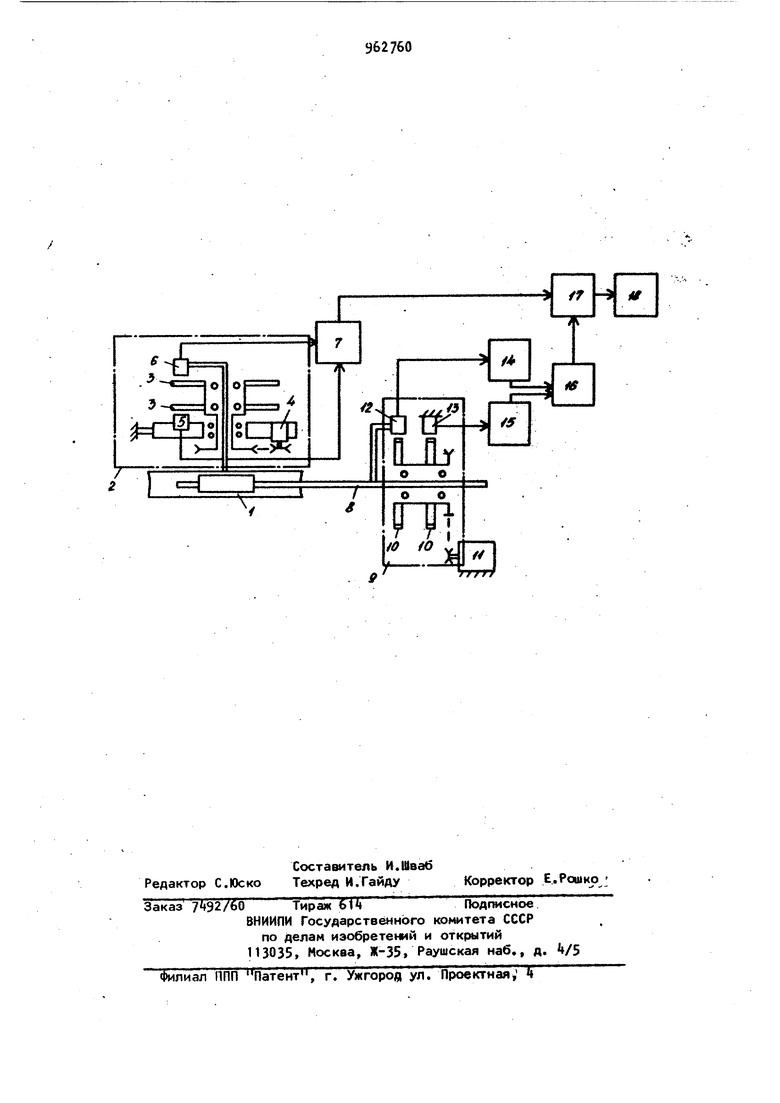
Указанная цель достигается тем, что устройство для контроля кинематической погрешности передач, содержащее фотоэлектрические датчики углов поворота начального и конечного звеньев контролируемого механизма с двумя считывающими головками, одна из которых соединяется с подвижными звеньями механизма, другая установлена относительно нее неподвижно, делители частоты, фазометр с подключенными к его входу считывающими головками датчика углов поворота начальногр звена и регистрирующий прибор, снабжено до олнительным фазометром и сумматором, а считывающие головки датчика углов рюворота конечного звена через делители часто ты подключены к входам дополнительного фазометра, выход которого соединен с одним из входов сумматора , соединенного с регистрирущим прибором, другой вход сумматора связан с выходом основного фазометра. На чертеже изображена структурная схема устройства для контроля кинематической погрешности механизмов , Устройство включает в себя устана ливаемый на начальном звене 1 механизма фотоэлектрический датчик 2 с .двумя круговыми растровыми решетка:ми 3, вращаемыми электродвигателем , и. двумя считывающими головками 5 и 6, соединенными с фазометром 7. . Считывающая головка 5 установлена неподвижно, а головка 6 закреплена на начальном звене 1. На конечном звене 8 установлен фотоэлектрически датчик 9 с двумя круговыми растревыми решетками 10, вращаемыми электродвигателем 11. Считывающие голов ки 12 -и 13 через делители 1 и 15 частоты подключены к входам дополнительного фазометра 16. Считывающа головка 12 закреплена на конечном звене 8, а головка 13 установлена относительно нее неподвижно. Выходы фазометров 7 и 16 подключены к сумм тору 17, соединенному с регистрирующим прибором 18. Устройство работает следующим об разом. При вращений начального и конечного звеньев 1 и 8 контролируемого механизма и растроенных решеток 3 и 105 считывающие головки 5, 6 и 12 13 генерируют импульсные электричес кие сигналы. При этом сигналы головок 5 и 6 фотоэлектрического датчик 2 начального звена 1 подаются на фа зометр 7, а сигналы головок 12 и 13 фотоэлектрического датчика 9 конечного звена 8 поступают на дополнительный фазометр 16 через делители 1 и 15 частоты. Коэффициенты деле ния делителей и 13 частоты подби раются таким образом, чтобы выходные сигналы фазометров 7 и 16 имелк одинаковый период следования. Выходные сигналы фазометров 7 и 16 подаются на сумматор 17, в котором они сравниваются по амплитуде. Результат сравнения, пропорциональный кинематической погрешности, регистрируется прибором 18. При одинаковом числе штрихов растровых решеток 3 и 10, коэффициент деления делителей Ц и 15 равен передаточному отношению контролируемого механизма, что позволяет контролиров ть, например, делительные цепи станков при настройке на любые целые передаточные отношения в диапазоне работы станка без применения дополнительной механической передачи. Это позволяет повысить точность измерения высокочастотных составляющих кинематической погрешности по сравнению с известным устройством. Формула изобретения Устройство для контроля кинематической погрешности механизмов, содержащее фотоэлектрические датчики углов поворота начального и конечного звеньев контролируемого механизма с двумя считывающими головками, одна из которых соединяется с подвижными звеньями механизма, другая установлена относительно ее неподвижно, делители частоты, фазометр с подключенными к его входу считывающими головками датчика углов поворота начального звена и регистрирующий прибор, отличающееся тем, что, с целью повышения точности контроля, оно снабжено дополнительным фазометром и сумматором, а считывающие головки датчика углов поворота конечного звена через делители частоты подключены к входам дополнительного фазометра, выход которого соединен с одним из входов сумматора, соединенного с регистрирующим прибором, другой вход сумматора связЭн с выходом бсновного фазометра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № A60it33, кл. G Q1 В 7/28, 1971. 2. Авторское свидетельство СССР № +53356, кл. G 01 В 7/28, 1971 (прототип).
