1
Изобретение относится к электротехнике и может быть использовано для регулирования .интегрирующего привода (ИП) повышенной точности, используемого в автоматике и вычислительной технике.
Наиболее близким по технической сущности к предлагаемому является способ настройки интегрирующего привода переменного тока, заключающийся в том, что после устранения автоколебаний компенсируют остаточное выходное напряжение тахогенератора при отсутствии входного сигнала, подавая поочередно на вход привода синфазную с сетью и квадратурную относительно сети составляющие напряжения с выхода компенсирующего устройства после чего разгоняют привод до околомаксимальной скорости, затем приводят предварительное масштабирование, устраняют фазовый сдвиг между напряжениями с выходов задающего устройства и тахогенератора и устанавливают окончательную величину масштаба. Остаточное выходное напряжение тахогенератора компенсируют при заторможенном .роторе исполнительного электродвигателя привода. Критерием правильной настройки является отсутствие дрейфа нуля при включении привода
1.
Недоста.тком известного способа настройки является;то, что остаточное напряжение асинхронного тахогенератора не остается постоянным по амплитуде и фазе (по синфазным и
0 квадратурным составляющим) при различных угловых положениях ротора. Такая зависимость остаточного напряжения тахогенератора от угла поворота создает зону нечувствительнос5ти по входному (а также компенсирующему) напряжению. В результате неправильный подбор компенсирующего напряжения может не вызывать ,, Ьрейфа нуля привода, а приводить
0 к погрешности от нелинейности и несимметричности характеристик привода и к его фазовым погрешностям.
Цель изобретения - повышение точности настройки интегрирующего
5 привода.
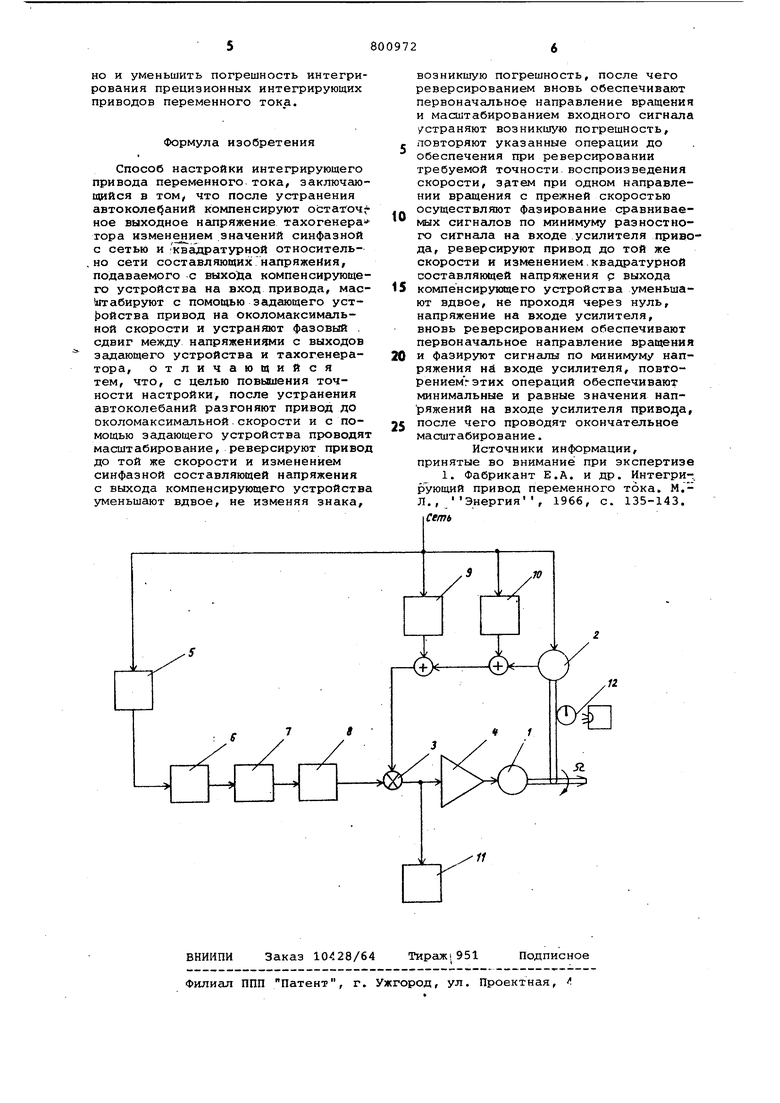
Указанная цель достигается тем, что в компенсацию остаточного напряжения тахогенератора осуществля-о 30 к)т в приводе, вращаквдемся на околомаксимальной скорости, при этом компенсацию синфазной составляющей остаточного напряжения,осуществляют- поочередно с масштабированием при различных направлениях вращения привода, а компенсацию квадратурной составляющей - поочередно с фазированием напряжений. На чертеже приведена блок-схема интегрирующего привода переменного тока. На вал исполнительного двигателя 1 посажен асинхронный тахогенератор 2, с выхода которого заводит ся сигнал на элемент сравнения 3, являющийся входом усилителя 4. Вход переключателя реверса 5 подкл рчен к сети обычно через силовой трансфйрматор, а его выход - к масштабному задатчику напряжения б, вьисод которого подключен к входу делительного задатчика напряжения 7, вы ход которого в свою очередь подключ ко входу фазирующего устройства 8, выход которого подключен к элементу сравнения 3. Сигнал обратной связи корректируется масштабным 9 и фазов 10 компенсирующими устройствами, за пи-ганнымиг от сети, выходы которых подключены к элементу сравнения 3. Контроль входного напряжения усилит ля 4 производится селективным нульиндикатором. 11, а скорости привода строботахометром 12. Способ настройки интегрирующего привода переменного тока осуществля ется следующим образом. Перед настройкой необходимо убе диться, что при зходном напряжении, равном нулю, в приводе отсутствуют автоколебания. Затем подачей напряжения на вход устанавливают в приво де скбрость вращения, равную точке масштабирования (обычно 0,8 от максимальной скорости диапазона). Подбором масштаба входного сигнала с помощью масштабного задатчика напря жения 6 обеспечивгиот, чтобы при одном направлении вращения двигателя, например по часовой стрелке, стробоскопическое изображение вращающегося диска строботахометра 12 было неподвижно, т.е. скоростная погретность равна нулю. Затем переключате лем реверса 5 изменяют фазу входног сигнала на 180°, т.е. изменяют направление вращения двигателя. Возник шую при этом погрешность, измеренну по вращению стробоскопического изоб ражения, уменьшают вдвое, не изменя знака, изменением синфазной состав.ляющей напряжения с выхода компенси рующего устройства 9. После этого переключателем реверса 5 вновь изме няют направление вращения и подбором масштаба входного сигнала по масштабному задатчику напряжения б вновь обеспечивают, чтобы стробоско пическое изображение диска было неподвижно. Повторением этих операций осуществляют компенсацию синфазной , составляющей остаточного напряжения тахогенератора, а также симметрирование и масштабирование привода с требуемой точностью (например, с погрешностью 0,01% и меньше). Для точной компенсации квадратурной составляющей и фазирования привода при одном направлении вращения с прежней скоростью (0,8 от максимальной) обеспечивают с помощью фазирующего устройства 8 минимальные показания нуль-индикатора 11. Затем изменяют направление вращения привода и изменением квадратурной составляющей напряжения с выхода фазового компенсирующего устройства 10 уменьшают вдвое, не проходя через минимум, напряжение, измеренное нульиндикатором 11. После этого вновь изменяют направление вращения и вновь фазируют сигналы с помощью фазирующего устройства 8 по минимуму показаний нуль-индикатора 11. Повторением этих операций обеспечивают компенсацию квадратурной составляющей остаточного напряжения тахогенератора, а также фазирование входного сигнсша с сигналом тахоге нератора с требуемой точностью. После проведения фадлрования устанавливают окончательное значение масштаба входного сигнала и проверяют, чтобы в точке масштабирования на обоих направлениях вращения скоростная погрешность не превосходила требуемой, а разностное напряжение привода, измеренное нульиндикатором 11, было одинаковым и минимапьным. При входном напряжении, равном нулю, проверяют отсутствие дрейфа нуля привода. На этом настройка привода закончена. При больших уровнях остаточного напряжения предварительно может бы-гъ проведена его ко1 тенсация при неподвижном роторе аналогично известному. Преимуществом предлагаемого способа настройки привода является то, что влияние переменной составляющей остаточного напряжения тахогенератора на точность компенсации истинного, значения постоянной составляющей остаточного, напряжения исключено, что позволяет существенно снизить погрешности привода, зависящие от настройки. Настройка по предлагаемому способу всегда однозначна, поэтому в любой момент времени можно определить, какие параметры привода изменились по сравнению с первоначальной настройкой, т.е. выявить , дрейфующий элемент.Применение способа позволяет существенно повысить не только точность настройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| Способ настройки интегрирующего привода переменного тока | 1984 |
|
SU1302412A1 |
| Интегрирующий привод | 1976 |
|
SU822144A1 |
| Интегрирующий привод переменного тока | 1985 |
|
SU1272306A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Интегрирующий привод | 1975 |
|
SU661503A1 |
| Устройство для дискретного задания углов | 1978 |
|
SU1067575A1 |
| Интегрирующий привод переменного тока | 1976 |
|
SU602914A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
