- .. )- V. ..
Изобретение относится к геодезии, топографии, аэронавигации и может :. быть использовано в гравиметрии для определения поправок в результаты измерения силы тяжести с борта летательнйх аппаратов. :
Известны радиометрические и-лазерные способы определения высоты путем посылки и приема радио или оптических сигналов }.
Одиако яепосредственные показания радиометрических и лаэернйх способов включают 0 себя неизвестные 1аысоты рельефа местности, поэтому быть использованы только для измерений над спокойным морем. Над пересечением рельефом из-за его влияния этими способами пока не удёшось получить удовлетворительную точность измерения высоты полета- относительно исходной уровенной поверхности.
Известен также способ измерения высоты полета летательных аппаратов и высоты рельефй местности вдоль .траектории полета ртйосительно Исходной уровенной поверхности путем измерения высоты летательного аппарата относительно рельефа поверхности Земли при помощи параметров барического поля 2 .
: Недостатком известного способа является то, что результаты измерений сильно зависят от неравновесия ее- , тественного барического поля и возмущений еро,: Вызываемых летательным аппаратом, учесть которые с необходимсэй точностью, невозможно...:
Цель изобретения повышениеточности измерений. .
. Поставл:енная цель достигается тем, что в известном способе измерения высоты полет летательных аппаратов и/или высота рёлбефа местности вдоль траектории полета о носительно исхОдн-рй уровенной поверхности путем изменения высоты полета летательного аппарата относительно рельефа поверхности Зетуши, одновременно с высотой измеряют расстояние до поверхности
0 рельефа по направлению, лежащему в вертикальной плоскости, содержащей Траекторию полета, и составляющему с отвесом заданный отличный от нуля угол, .по результатам измерений опре5деляют горизонтальную и вертикальную проекции этогорасстояния, а измерение высоты и расстояния в последующей точке выполняют через опорный Интервал времени, соответствующий
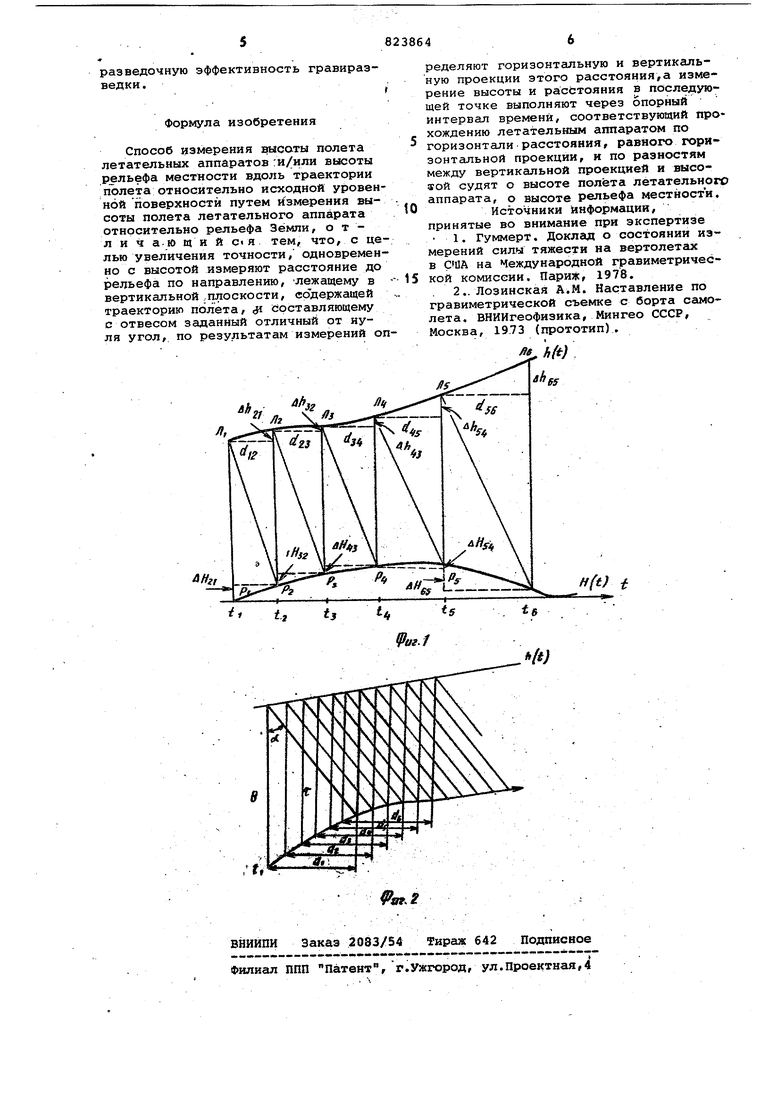
0 прохождению летательным аппаратом по горизонтали расстояния, равного горизонтальной проекции, и по разности между вертикальной проекцией и высотой судят об изменении высоты рельефа местности, а по разнос.ти между вертикальной проекцией и высотой последующей точки судят о высоте полета летательного аппарата. Кроме того, с целью непрерывного измерения, расстояние до поверхности рельефа измеряют в течение опорного интервала времени многократно, -причем отрезок времени между началами двух соседних измерений не менее, чем время, потребное для проведения единичного измерения. Рассмотрим пример такого способа определения высоты полета при помо. щи высотомера и дальномера. На фиг. 1 изображена схема применения способа; на фиг. 2 - с.хема многократного применения .способа. Ось визирования высотомера 8 направлена по отвесу вниз, ось визирования дальномера t под углом ОС к нему (рис. 1). В момент времени t, по лучам S и определяют высоту и расстояние .. По известному рас стоянию определяется его горизонтальная проекция (3(2 . После того как летательный аппарат пролетит интервал пути (Э( его конце в момен времени t-j измеряется высота по лучу 0 до площадки Р2, а по лучу t - расстояние до площадки Рд Затем вычисляется горизонтальная про екция расстояния т.е. d23 На конце интервала dj- измеряется высо та , расстояние и проекция d и так далее. Так ведутся измерения при наличии на борту навигационной cHCTefrM для определения горизон тальных расстояний. Если на борту имеется аппаратура для определения курса и скорости, то измерения ведут на концах интервалов времени di2 .Т, tj - t , Tg t, - t и т.д., где - скорость. Та ким образом измеряются высоты Л.Р.ч И расстояния . Зная эти высоты н расстояния, а также уголоб, находим превышения iHjj между площадками Р., и Р I как разность высоты Л Р и вертикальной проекции расстояния , превышение дН.52 межДУ площадками Р и Р , как разность высоты Л2Р2 и вертикальной проекции расстояния . Также определяют ДН, й.Ну4 и т.д. Затем определяется превышениеДЬ2( между точками Л и Л, как разность высоты вертикальной проекции расстояния , превышение uh$ между точками Л. и Лу, как разность высоты и ве)ртикальной проекции расстояния Л,Лд, превышений uh4 , и т.д. В общ случае превышения между площадками рельефа,-разделенные интервалом времени Т, вычисляют по формуле H(t + T)t (t) - Ko(t), превыения между точками .полета по формуле &h.(t + T}t Sg(t Т) -- Ki,(t), где Sg(t) -.высота измерения до поверхности Эемпк по лучУ в момент времениt; измеренное - расстояние, по лучу 2 в тот же МО- . мент времени; const Kg cos ос И)-высота, измеренная по лучу в через интервал времени Т после t. Суммируя все последовательно получаемые приращения высот ih и &H, определяем высоту летательного аппарата в любой точке его траектории относительно исходной уровенной поверхности и высоту рельефа. . Такимобразом, по одновременным определениям расстояний и высот из точки траектории полета определяютс.ч высоты рельефа поверхности Земли H(t), по разновременным измерениям расс.сояния и высоты до одной и той же площадки на поверхности из различных точек полета .определяются их высотыh(t} . Для проведения непрерывных измерений расстояния и высоты :измеряа)Т гораздо чаще, чем через интервалы пути dj/j.-.., равные горизонтальным проекциям лучей J . Для этого в начале пути измерения расстоян- й и высот ведут с частотой, обеспечиваемой быстродействиелМ .ч3лмеритель:-:ой аппаратуры, а затем они выполклются на концах интервалов d,d2 fdj,. .. 2), вычисленныхкак горизонтальные .проекции расстояний, измеренных по лучу соответственно в точках 1, 2 3(... рис 2), в интервале d,j , djj ,... (рис. 1) . Гравиметрические измерения в движении весьма затруднительны, в частности из-за большого уровня помех, вызываекык вертикальньат ускорениями. Зная же разность высот между точ- ками траектории полета, находят поправку за вертикальные инерационные ускорения 6(5 , например по формуле )-hl4) hit vrn-MU . 4Ч По этим данным вычисляют поправку ,за высоту, а по превышениям между площадками рельефа ДН поправку за рельеф. Применение способа позволяет существенно уменьшать трудозатраты и сократить время при проведении гравиметрической съемки, особенно а труднодоступных местностях:тайге, тундре, пустыне,,- горах и Tsn.; изза возможн)сти изучения пространственного распределения гравитационного поля существенно увеличивать геолого
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| Способ определения барометрической высоты летательного аппарата в полете с использованием бортовых спутниковых навигационных приемников и авиационных метеорологических прогнозов | 2024 |
|
RU2824733C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2588105C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
