ами блока индикации, а выходы - с входами интеграторов, выходы которых подключены к соответствующим входам силительно-преобразовательных блоков.
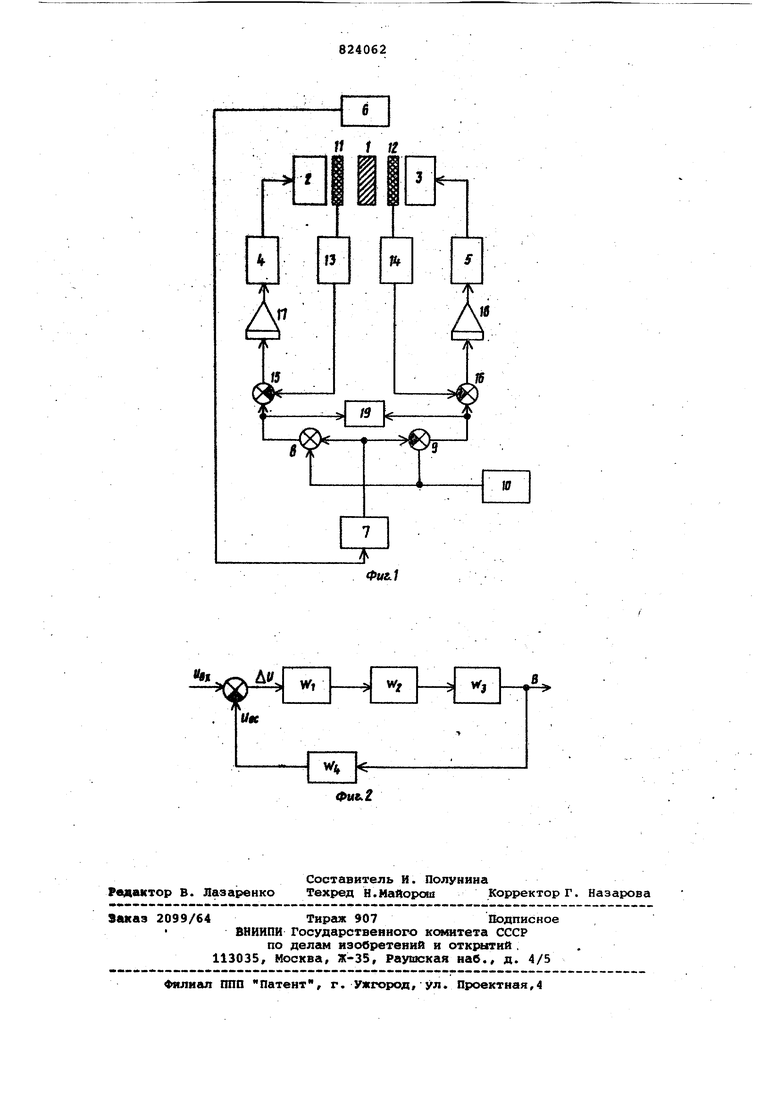
На фиг. 1 приведена функциональная схема акселерометра на фиг.2 структурная схема замкнутого контура регулирования величины индукции в Зазоре.
Предлагаемый компенсационный акселерометр содержит инерционный элемент 1, установленные с противоположных сторон от него первый 2 и второй 3 электромагниты, обмотки которых соединены с выходами соответственно первого 4 и второго 5 усилительно-преобразовательных блоков, атчик б положения инерционного элемента, подключенный к входу блока 7 инамической коррекции, блок 8 суммирования иблок 9 вычитания, первые входы которых подключены к источнику 10 опорного сигнала, а вторые входы - к выходу блока 7 динамической коррекции, первый и второй датчики индукции, состоящие из чувствительных элементов 11 и 12, размещенных в зазорах между инерционным элементом 1 и соответствующими электромагнитами 2 и 3, и подключенных к их выходам усилительно-преобразовательных, блоков 13 и 14, две схемы 15 и 16 сравнения, два интегратора 17 и 18 и блок 19 индикаций. Первые входы схем 15 и 16 сравнения подключены к выходам блока 8 суммирования и блока 9 вычитания, их вторые входы - к выходам первого 13 и второго 14 датчиков .индукции, а выходы - через интеграторы 17 и 18 подключены к входам первого 4 и второго 5 усилительно-преобразовательных блоков. Входы блока 19 йндикации соединены с одноименными входами схем 15 и 16 сравнения.
При этом последовательно соединенные схемы 15 и 16 сравнения, интеграторы 17 и 18, усилительно-прербразо-; вательные блоки 4 и 5 и электромагниты 2 и 3, а также датчики индукции 13 и 14, измерительные элементы 11 и 12 которых находятся в полях электромагнитов 2 и 3, а выходы подключены к вторым входам схем 15 и 16 сравнения, образуют два замкнутых контура регулирования величины индукции в зазорах меяоду инерционным элементом и электромагнитами. Входной величиной Ugy дли одного из них является сигнал с блока 8 суммирования, ,а выходной - величина, индукции в зазоре первого электромагнита 2. Для другого контура регулирования индукции входной «величиной является сигнал с блока 9 вычитания, а выходной - величина индукции в зазоре второго электромагнита 3. Пусть на первый вход схемы IS (16) сравнения
такого контура регулирования поступает напряжение входного сигнала и« и одновременно на второй вход схемы 15(16) сравнения с выхода датчика индукции поступает напряжение и, , пропорциональное величине индукции IB зазоре электромагнита 2(3).На выходе схемы 15(16) сравнения образуется напряжение рассогласования аи, которое, пройдя через интегра- тор 17(18) и уснлительно-преобразо вательный блок 4(5), вызывает такое изменение тока электромагнита 2(3) и соответственно такое изменение индукции в зазоре, чтобы напряжение рассогласования ли на выходе схемы
5 15(16) сравнения стало равным нулю. При этом напряжение . с выхода датчика индукции будет равно величине входного сигнала Ugy ,а индукция в зазоре между инерционным элементом
0 и электромагнитом будет пропорциональна входному сигналу U .
Согласно структурной схеме контура регулирования величины индукции в зазоре, изображенной на фиг.2, его пес редаточная функция может быть представлена в виде
.W.j
W
1 ,
W - i -г- р
передаточная
де функция интегратора;
W, K.,
передаточная функция усилительно-преобразовательного блока;
W. АЗпередаточная
Т,Р-И функция электромагнита; передаточная
функция датчика индукции;
Т-- постоянная : вре.мени электромагнита.
После подстановки и преобразований олучаем окончательное выражение для ередаточной функции контура регулирования величины индукции в зазоре
Тз (flf
.Р
Р-Ц
К4К.ДК,
Как видно из полученного выражения, статическая характеристика тако-. го контура определяется выражением
1 В
° °U
Т.е. зависит.только от статического коэффициента передачи датчика индукции и не зависит от параметров интегратора , усилительно-преобразовательного блока, электромагнита, в ом числе и от величины зазора ifl.
Электромагнитный компенсационный акселерометр работает следуквдим образом.
Пусть в исходном состоянии инерционный элемент 1 находится в центральном положении и на него не действует ускорение. При этом сигналы на выходе датчика б положения, блока 7 динамической коррекции и BTOJMJX входах блока 8 суммирования и блока 9 вычитания равны нулю. Напряжение, пО ступающее на первые входы схем 15 и 16 сравнения, равно напряжению, поступакйцему с источника 10 опорного сигнала. Соответствующие замкнутые контура регулирования индукции устанавливают величины индукций в зазо- pax между инерционным элементом Г электромагнитами 2 и 3 пропорционально величинам сигналов на первых вхоах схем 15 и 16 сравнений. Таким образом, индукции в зазорах равны по величине и противоположны по направлению. Так как силы, действующие на инерционный .элемент со стороны электромагнитов, определяются величинами индукций в зазорах, то их результирунадее воздействие будет равно- нулю и инерционный элемент будет продолжать находиться в центральном положении,
При воздействии внешнего ускорения на инерционный элемент 1 и отклонении его, например, в направлении электромагнита 3, на выходе датчика 6 положения появляется сигнал положительной полярности, поступающий через блок 7 дз инамической коррекции, вводящий сигнал, пропорциональный производной по смещению, на вторые входы блока 8 суммирования и блока 9 вычитания. При этом на первом входе первой схемы 15 сравнен-ия сигнал увеличивается, а иа первом входе второй схемы 16 сравнения уменьшается. Соответственно работой замкнутых контуров регулирования величины индукции в зазорах обеспечивается пропорциональное возрастание величины индукции в зазоре между элементом 1 и электромагнитом 2 и пропорциональное уменьшение величины индукции в зазоре между инерционным элементом 1 и электромагнитом 3.
Таким образом, с,ила s ekfpbikieit нитнрго обратно -о преобразователя будет линейно зависеть от напряжений на первых входах схем сравнений. При этом величина напряжения на одноименных входах схем 15 н 16 сравнений, регистрируемая в блоке 19 индикации, будет пропорциональна инерционной силе, вызываемой внешним ускорением, действующим на Инерционный элемент, и, следовательно/ускорению,
Таким образом, в предлагаемом акселерометре устраняется нелинейность статической характеристики электромагнитного обратного преобразователя, вызванная влиянием изменения зазора между электромагнитами и инерционным элементом при воздействии внешнего ускорения. Поэтому при линейности всех остальных блоков
5 общая статическая характеристика акселерометра будет линейной.
Формула изобретения
0
Компенсационный акселерометр,содержащий инерционный элемент, расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами усилительно-,
5 преобразовательных блоков, датчик положения инерционного элемента, подключенный ко входу блока динамической коррекции, блок суммирования и блок вычитания, одни из входов
0 Которых подключены к источнику опорного сигнала, другие - к выходу блока динамической коррекции, и блок индикации, отличающийся тем, что, с целью повышения точнос5ти измерений за счет линеаризации статической характеристики акселерометра, в него введены два датчика индукции, чувствительные элементы которых размещены .в зазорах между
0 инерционным элементом и соответствукяцим электромагнитом, два интегратора и две схемы сравнения, причем одни из входов схем сравнения соединены с соответствукхцими выходами блока суммирования и блока вычита5ния и с входами блока индикации, а выходы - с входами интеграторов, выходы которялх подключены к роответствукацим входам усилительно-преобразовате льных блоков,
0
Источники информации, принятые во внимание при экспертизе
1.Патент ОНА 3664196, кл. 73-517, опублик, 1972,
2.Патент США В 3090239,
5
кл. 73-517, опублик, 1963 (прототип) .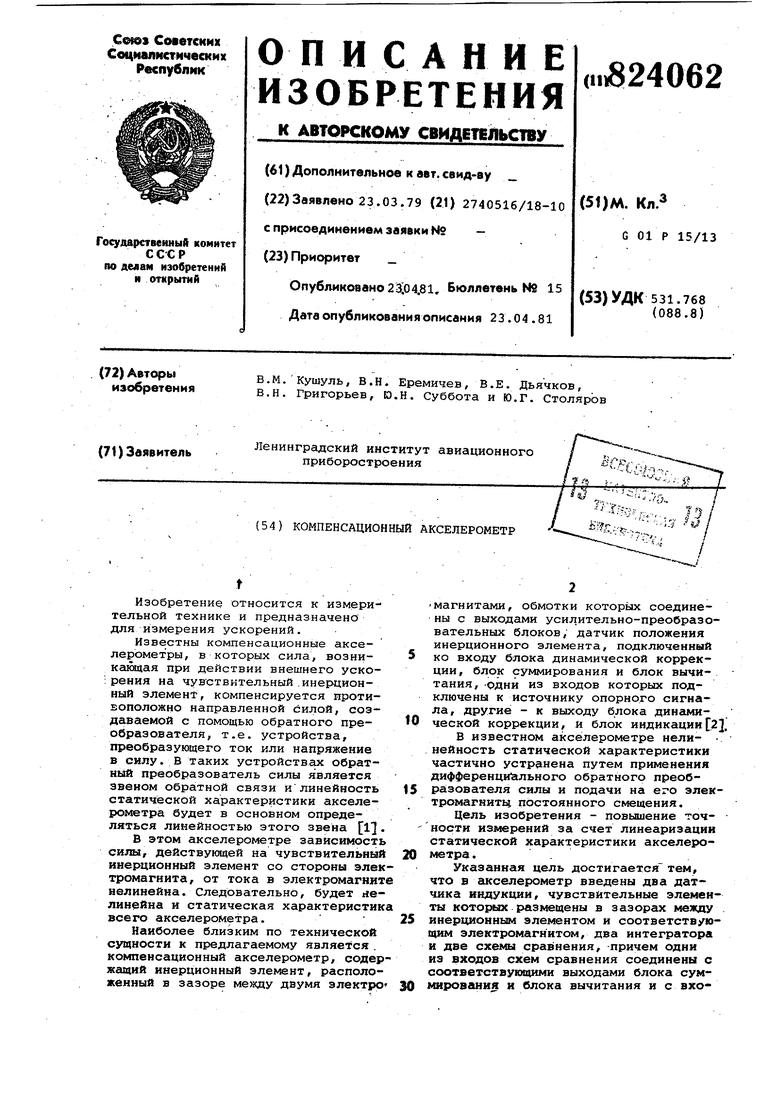
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1983 |
|
SU1101744A1 |
| Компенсационный акселерометр | 1981 |
|
SU1068820A1 |
| Компенсационный акселерометр | 1982 |
|
SU1129524A1 |
| Акселерометр | 1983 |
|
SU1109647A1 |
| Акселерометр | 1986 |
|
SU1385079A2 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| Устройство для измерения параметров вибрации | 1982 |
|
SU1024855A1 |
| Трехкомпонентный акселерометр | 1983 |
|
SU1137397A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |