Изобретение относится к измерительной технике и предназначено для измерения ускорений, В акселерометрах, построенных по компенсационной схеме, сила, возникающая при действии внешнего ускоре |ния на чувствительный инерционный гэлемент, компенсируется противоположно направленной силой, создаваемой с пс 1ощью обратного преобразователя т.е. устройства, преобразующего ток или напряжение в силу. Известен акселерометр, содержащий инерционный элемент, расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами усилительно-преобразовательны блоков, датчик положения инерционного элемента, подключенный через блок динамической коррекции к первым входам блоков суммирования и вычитания вторые входы которых соединены с выходом источника опорного сигнала и блок индикации pLj . Недостатком такого акселерометра является наличие нелинейнсЛ зависимости в,еличины силы обратного преобразователя от изменения величиюл зазора, что приводит к нелинейности статической характеристики и, как следствие, к ухудшению точности измерений. Наиболее близким к изобретению по технической сущности и достигаемо му результату является акселерометр, содержащий инерционный элемент, расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами первого и второ го усилителей мощности (усилительнопреобразовательных блоков) , датчик положения инерционного элемента, под ключенный через блок динамической коррекции к первым входам блоков суммирования и вычитания, вторые входы которых соединены с выходом первого источника опорного сигнала, чувствительные элементы первого и второго датчиков Индукции, размещенные в зазорах между инерционным элементсял и соответствующим электромагнитом, два демодулятора, две схемы сравнения, два интегратора и блок индикации, причем входы демодуляторов соединены с выходами чувствитель ных элементов первого и второго датчиков индукции, а выходы - с первыми входами схем сравнения, выходы которых соединены с входами соответствую щих интеграторов, вЕлходы интеграторов соединены с входами усилителей мощно сти, а вторые входы схем сравнения с выходами блоков суммирования и вычитания, блок индикации подключен к вторым входам схем сравнения 2 . Недостаток известного акселерйИётр заключается в том, что информационным сигналом является разность посто-. янных напряжений на входах схем сравнения. Погрешность устройств, измеряЮ1ДИХ разность постоянных напряжений, соизмерима с погрешностью датчиков индукции (основной погрешностью акселерометра) и складывается с ней, что, естественно, уменьшает точность измерений. Цель изобретения - повыиение точности измерения. Указанная цель достигается тем, что в акселерометр,содержащий инериионный элемент, расположенный в за-, pope между двумя электромагнитами, обмотки которых соединены с выходами первого и второго усилителей мощности, датчик положения инерционного элемента, подключенный через блок динамической коррекции к первым входам блоков суммирования и вычитания, вторые входы которых соединены с выходом первого источника опорного сигна ла, чувствительные элементы первого и второго датчиков индукции, размещенные в зазорах между инерционным элементом и соответствующим электромагнитом, два демодулятора, две схемы сравнения, два интегратора и блок индикации, причем входы демодуляторов соединены с выходами чувствительных элементов первого и второго датчиков индукции, а выходы - с первыми входами схем сравнения, выходы которых соединены с входами соответствующих интеграторов, введены два управляемых по частоте генератс а, . два модулятора, второй источник опорного сигнала и измеритель разности периодов, при этся входы первого и второго управляемых по частоте генераторов подсоединены к выходам блоков суммирования и вычитания соответственно, а их выходы соединены с первыми входами модуляторов, вторые входы которых соединены с выходами интеграторов,- а выходы - с входами первого и второго усилителей мощности соответственно, выходы первого и второго управляемых по частоте генераторов подключены к измерителю разности периодов, выход которого соединен с блоком индикации, а второй источник опорного сигнала соединен с вторыми входами схем сравнения. На чертеже приведена функциональная схема аксеперсметра, выполненного по компенсационной схеме. Акселерометр содержит инерционный элемент 1, расположенный в зазоре между электромагнитами 2 и 3, обмотки которых соединены с выходами первого 4 и второго 5 усилителей мсяцности, датчик 6 положения инерционного элемента, подключенный к входу блока 7 динамической коррекции, выход которого соединен с первыми входами блока 8 суммирования и блока 9 вычитания, вторые входы которых Соединены с выходом первого источника 10 опорного сигнала, чувствительные элементы первого 11 и второго 12 датчиков индукции, выполненные ввиде измерительной катушки и размещенные в зазорах между инерционным элементом 1 и соответствующим электромагнитом 2 или 3, два демодулятора 13 и 14, две схемы 15 и 16 сравнения, два интегратора 17 и 18 и блок 19 индикации. Входы демодуляторов 13 и 14 соединены с выходами чувствительных элементов первого 11 и второго 12 датчиков индукции, а вькоды с первыми входами схем 15 и 16 сравнения выходы которых соединены с входами соответствующих интеграторов 17 и 18. Входы первого 20 и второго j 21 управляемых по частоте генераторов подсоединены к выходам блоков 8 сравнения и вычитания 9 соответственно, а их выходы соединены с первыми входами модуляторов 22 и-23,. вторые,входа которых подключены к интеграторам 17 и 18, а ЁЫХОды - к входам первого 4 и второго 5 усилителей мощности соответственно. Выходы первого 20 и второго 21 управляемых по частоте генераторов подключены к измерителю 24 разности периодов, выход которого соединен с блокс 1 12 индикации. Второй источник 25 опорного сигнала соединен с вторыми входами схем 15 и 16 сравнения. При этом последовательно соединенные модуляторы 22 и 23, усилители 4 и 5 мощности, электромагниты 2 и 3, чувствительные элементы первого 11 и второго 12 датчиков индукции, находящиеся в полях электромагнитов 2 и 3, демодуляторы 13 и 14, схемы 15 и 16 сравнения, а также интегратора 17 и 18 подключены каждый к одному из входов соответствующего модулятора 22 и 23, образуют два замкнутых контура регулирований величины индукции в зазорах между инерционным элементом 1 и электромагнитами 2 и 3.
Рассмотрим работу замкнутых контуров регулирования величины индукции в зазорах.. Входной величиной Т для одного из них является период следования импульсов, снимаемых о первого управляемого по частоте генератора 20 и поступающих на первый вход модулятора 22, а выходной величина индукции в зазоре первого электромагнита 2. Для другого контура регулирования индукции входной величиной Т J является период следования импульсов, снимаемых с второго управляемого по частоте г нератора 21 и поступающих на первый вход модулятора 23, а выходной - величина
индукции в зазоре второго электромагнита 3.
Сигнал, наводимый переменным магнитным полем в измерительной катушке датчика индукции, равен:
d6
U,, NN5, (1)
где М - количество витков измерительной катушки; 5 - площадь полюса, охватьшаемая
измерительной картушкой 8 - величина индукции в зазоре. Учитывая, что характер изменения индукции в зазоре синусоидальный и описывается выражением
BBCtlainwt,- (2)
где 6(-tV - амплитуда;
U - частота колебаний, можно записать
Uj, /s 84tb4nwt(oe(t)co6cjt. В установившемся режиме BlU 0-,U4 N5co0(t)cosQt. (4)
Напряжение на выходе демодулятора определяется выражением
4. kcoB(t, (5)
гДе К - некоторый постоянный коэ фициент коэффициент усиления демодулятора) .
Выражение для индукции имеет вид
BW4U.,-T, : (6)
где Т - период колебаний.
Пусть на первый вход схемы 15(16).
сравнения поступает напряжение с выхода демодулятора 13 (14) а на второй вход - напряжение со второго источника 25 опорного сигнала - UQ . В исходном состоянии сигнал
на выходе схемы сравнения равен нулю,
т.е. 1)дзд UQ .
Пусть на вход модулятора 22 (23) /поступает последовательность импульсов с периодом Тц, . С выхода модулятора 22 (23) будет сниматься синусоидальный сигнал с периодом Т gj и амплитудой, модулированной напряжением, снимаемым с выхода интегратора 17 (18) . Усиленный iro мощности в усилителе 4(5) мощности сигнал поступает на электромагнит 2(3) и вызывает изменение индукции в зазоре. Соответственно изменяется сигнал, снимаемый с измерительной катушки датчика 11 (12) индукции, и сигнал с выхода демодулятора и дм . На выходе схемы 15 (16) сравнения появляется напряжение рассогласования 4 и 11 д,д,-DO, которое подается на интегратор 17 (18) и далее на модулятор 22 (23} , модулируя
по амплитуде синусоидальный сигнал
с периодом Tgx таким образом, что усиленный в усилителе 4(5) мощности, он вызывает такое изменение тока электромагнита 2(3} и,/соответственно, такое изменение инду.кции в зазоре, чтобы напряжение рассогласования Л и на выходе схемы 15 (16) сравнения стало равным нулю. При 3TOMUj M Uo , т.е. УддА будет величиной постоянной, заранее заданной. Таким образом, из формулы (б) следует, что индукция в зазоре между инерционным элементом и электромагнитом будет пропорционал на входному сигналу Тех.Акселерометр работает следующим образом.
Положим, что в исходном состоянии инерционный.элемент 1 находится в центральном положении между электромагнитами 2 и 3 и на него действует ускорение. При этом сигналы на выходе датчика 6 положения, блока 7 динамической коррекции и первых входах блока 8 суммирования и блока 9 вычитания равны нулю. На вход управляемых по частоте генераторов 20 и 21 импульсов подается напряжение с первого источника 10 опорного сигнала иon . Дгшее с выходов управляемых . по частоте генераторов 20 и 21 на первые входы модуляторов 22 и 23 поступает последовательность импульсов спериодами соответственно Tg и Тех, пропорциональными Uon при- чем в этом случае Тдх,Т0хг Соответствующие замкнутые контура регулирования индукции устанавливают величины индукции в зазорах между инерционным элементом 1 и электромагнитами 2 и 3 пропорционально величинам входных сигналов Tgn, и Тдхя из первых входах модуляторов 22 и 23. Таким образом, индукции в зазорах между рнерционным элементом 1 и электромаг нитами 2 и 3 будут равны по величине и п отивоп;оложны по направлению. Так как сипы, действующие на инерционный элемент 1 со стороны электро гнитов: 2 и 3, определяются величинами индукции в зазорах, то их результирующее воздействие будет равно нулю и инерционный элемент будет продолжать находиться в центральном положении.
При воздействии внетанего ускоре ния на инерционный элемент 1 и отклонения его, например в направлении
электромагнита 3, на выходе датчика 6 положения появляется сигнал положительной полярности, пропорциональный смещению инерционного элемента 1 и поступающий через блок 7 динамической коррекции, вводящий сигнал, пропорциональный производной по смещению, на первые входы блока 8 суммирования и блока 9 вычитания. При этом на входе управляемого по частоте генератора 2(J напряжение возрастает, а на входе управляемого по частоте генератора 21уменьшается. Соответственно возрастает период Tgj и уменьшается период Tgx- . В замкнутых контурах регулирования индукции пропорционально изменяется величина индукции в зазорак системы электромагнит-инерционное тело-электромагнит. При этом результирующая сила, воздействующая на инерционный элемент 1 определяется выражением
uFK tB bBf48o-bBf -4k9uB,
где К - коэффициент пропорциональности ;
Вд- величина индукции в зазорах при отсутствии внешнего ускорения;
приращение индукции, обусловленное действием вноинего ускорения.
Эта сила будет возвращать инерционный элемент 1 в центральное положение. Кроме этого, результирующая сила будет пропорциональной разности йТ между периодами импульсов, получаемых модуляторами 22 и 23, т.. е.
.. ,
где Т - величина периода импульсов на входе модуляторовлпри отсутствии внешнего ускорения}&Т - величина разности между
периодами импульсов, поступающих на вход модулятора 22Jи периодом импульсов, поступаю1цих на вход модулятора 23 при наличи внешнего ускорения.
Таким образом, в предлагаемом акселерометре исключено измерение аналогового сигнала и достигается повышение точности измерения ускорения за счет использования цифрового измерителя временного интервала.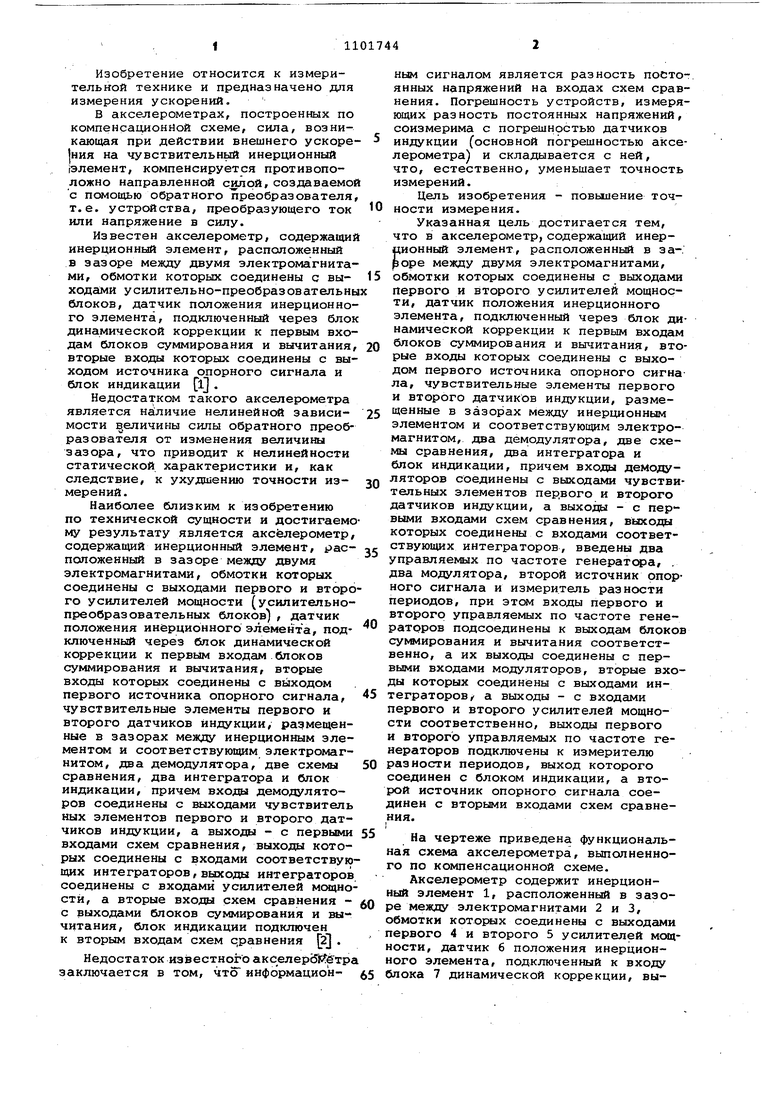
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1986 |
|
SU1385079A2 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| Компенсационный акселерометр | 1981 |
|
SU1068820A1 |
| Трехкомпонентный акселерометр | 1983 |
|
SU1137397A1 |
| Компенсационный акселерометр | 1982 |
|
SU1129524A1 |
| Акселерометр | 1983 |
|
SU1109647A1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |
| Бесконтактный задатчик силы | 1983 |
|
SU1257524A1 |
| Устройство для измерения параметров вибрации | 1982 |
|
SU1024855A1 |
АКСЕЛЕРОМЕТР, содержащий инерционный элемент, расположенный в зазоре между двумя электрсялагнитами, -обмотки соединены с выходами первого и второго усилителей мощности, датчик положения инерционного элемента, подключенный через блок динамической коррекции к первым входам блоков суммирования и вычитания, вторые входы которых соединены с выходом первого источника опорного сигнала, чувствительные элементы первого и второго датчиков индукции, размещенные в зазорах между инерционным элементом и соответствующим электромагнитом, два демодулятора, две схемы сравнения, два интегратора и блок индикации, причем входы демодуляторов соединены с выходами чувствительных эл лентов первого и второго датчиков индукции, а выходыс первыми входами схем сравнения, выходы которых соединены с входами соответствуийцих интеграторов отличающийся тем, что, с целью повьааения точности измерения, в него введены два управляемых по частоте генератора, два модулятора, второй источник опорного сигнала и измеритель разности периодов, при этом входы первого и второго управляe «ыx. по частоте генераторов подсоединены к выходам блоков суммироО) вания и вычитания соответственно, а их выходы соединешл с первыми входами модуляторов, вторые входы которых соединешг с выходами интеграторов, а выхода - с входами первого и второ-, го усилителей мощности соответственно, выходы первого и второго .управляемых по частоте генераторов подключены к измерителю разности периодов, выход котсфого соединен с блоком индика1ШИг а второй источник опорного сигнала соединен с вторыми входами схем сравнения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3090239, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| (прототип). | |||
