Изобретение относится к приборостроению и может быть использовано в автоматике и на транспорте для измерения параметров вибрации объекта.
Известно устройство для измерения параметров движения объекта, содержащее инерционный элемент, расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами усилительно-преобразовательных блоков, датчик положения инерционного элемента, подключенный к блоку динамической Коррекции, блок суммирования и блок вычитания, одни из входов которых подключены к источнику опорного сигнала, другие к выходу блока динамической коррекции , чувствительные элементы датчиков индукции размещены в зазоре между инерционным элементом и соответствующим электромагнитом, схемы сравнения соединены с соответствующими входами блока суммирования и блока вычитания и с выходом блока индикации, а выходы - с входом интеграторов, выходы которых подключены к соответствующим входам усилительнопреобразовательных блоков
Недостатком указанного устройства является сложность конструкции и сравнительно невысокая точность, обусловленная уходами опорного Wa-1 пряжения от действия температурных и других мешающих воздействий.
Наиболее близким по технической сущности к изобретению является маятниковый компенсационный акселерометр, содержащий инерционный элемент, преобразователь углового положения, выполненный в виде магнитопровода с обмотками возбуждения и сигнальной , магнитоэлектрический датчик момента с компенсационной обмоткой, усилитель-демодулятор, на выход которЬго подключен резистор обратной связи, соединенный с преобразователем ток - код, и источник питанияЕ2
Недостатком известного устройства является сложность конструкции и сравнительно невысокая точность устройства за счет использования разнесенных систем преобразования углового положения и силовой компенсации.
Целью изобретения является упрощение конс5трукции.
Поставленная цель достигается тем что в устройстве для измерения параметров вибрации объекта, содержащем инерционный элемент, преобразователь углового положения, выполненный в виде магнитопровода с обмотками возбуждения и сигнальной, магнитоэлектрический датчик момента с компенсационной обмотной, усилитель-демсщулятор, на выход которого подключен резистор обратной связи, соединенный с преобразователем ток-код, и источник питaнияf, инерционный элемент выполнен в виде укрепленного не подвесе короткозамкнутого витка-каркаса с компенсационной обмоткой, магнитопровод датчика момента и преобразователя углового положениявыполнен единым с постоянным магнитом а на его ярме расположен с возможностью перемещения в зазоре между полюсным наконечником постоянного магнита и.ярмом виток-каркас,при этом на ярме расположены сигнальные обмотки подключенные к введенным настроенным реактивным контурам и соединенным через усилитель-демодулятор и резистор обратной связи с компенсационной обмйткой.
На чертеже приведена функциональнея схема предлагаемого устройства.
Устройство содержит корпус 1, объединенный магнитопровод 2, постоянный магНит 3, питающую обмотку 4, полюсный наконечник 5, зазор б, ярмо 7, маятниковый подвес 8, короткозамкнутый виток-каркас 9, сигнальные обмотки 10 и 11, компенсационную обмотку 12, настроенные реактивные контуры 13 и 14, переменные резисторы 15 и 16, конденсаторы.17 и 18, усилитель-демодулятор 19, резистор 20 обратной связи, преобразователь ток - код 21, процессор 22, источник 23 питания..
На чертеже обозначено: 00 - ось чувствительности устройства; ММось симметрии устройства; NS - полюса магнита.
На корпусе 1 установлен объединенный магнитопровод 2, являющийся общим для постоянного магнита 3 и электромагнита, питающая обмотка 4 которого укреплена на постоянном магните 3, имеющем полюсный наконечник 5. В зазоре 6 между полюсным наконечником 5 и ярмом 7, на маятниковом подвесе 8 установлен короткозамкнутый виток-каркас 9, охватывающий с зазором ярмо 7, на котором размещены сигнальные обмотки 10 и 11 датчика угла. ;
Короткозамкнутый виток-каркас 9 с компенсационной обмоткой 12 является инерционным элементом (ИЭ), чувствительным к действию ускорения.
Сигнальные обмотки 10 и 11 подключены к соответствующим настроенным реактивным контурам 13 и 14, каждый из которых включает в себя переменный резистор 15 и 16 и конденсатор 17 и 18 соответственно.
Настраиваемые реактивные контуры 13 и 14 сое №нены с усилителем-демодуляторюм 19, виход которого через резистор 20 обратной связи подключен к компенсационной обмотке 12 .датчика момента, создавая цепь отри
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2313100C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2450278C2 |
| Датчик моментов акселерометра компенсационного | 2021 |
|
RU2776595C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2021 |
|
RU2758892C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1760861A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ, содержащее инерционный элемент, преобразователь углового положения, выполненный в магнитопровода с oб 4oткaми возбуждения и сигнальной, магнитоэлектрический датчик момента с компенсадионной обмоткой, усилитель-, д емодулятор, на выходкоторого подкточен резистор обратной связи, соединенный с преобразователем ток код, и источник питания, .о т л и ч ающ ее с я тем, что, с цепью упрощения конструкции, и нерцион ный элемент выполнен в виде укрепленного на подвесе короткозамкнутого витка-каркаса с компенсационной обмоткой, магнитопровод датчика момента и преобразователя углового положения выполнен .единым с постоянным магнитом, а на его ярме расположен с возможностью перемшцения в зазоре между полюсным наконечником постоянного магнита и ярмом виток-кёфкас, при этом на ярме расположены сигнальmie обмотки, подключеннь е к введен- i.§ там настроенным реактивны контурам и соединенные через усилитель-демодулятор и резистсф обратной связи с коишенсационной обмоткой.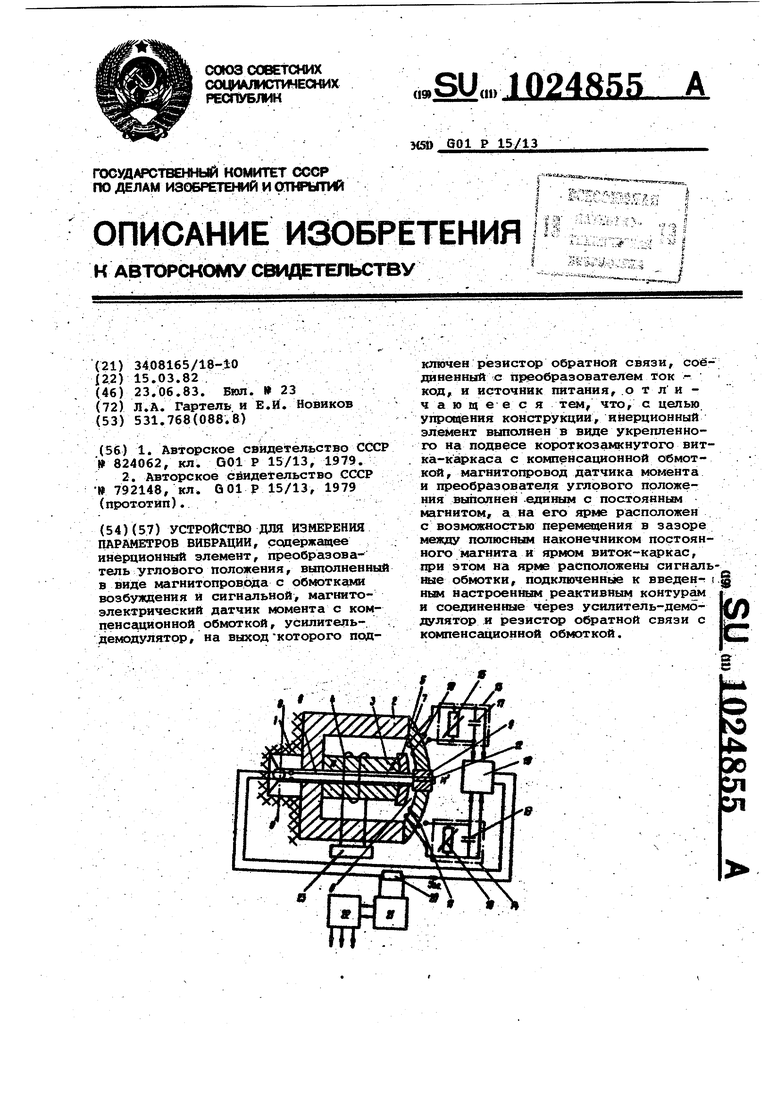
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Маятниковый компенсационный акселерометр | 1979 |
|
SU792148A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
