Изобретение относится к измерению параметров движения подвижных объектов, в частности к измерению линейных ускорений.
Целью изобретения является повышение точности измерения ускорений.
На чертеже представлена упрощенная функциональная структурная схема акселерометра.
Акселерометр содержит инерционный элемент 1, расположенный между электромагнитами 2 и 3, обмотки которых соединены с выходами первого 4 и вто- рого 5 усилителей мощности, датчик положения 6 инерционного элемента, подключенный к входу блока динамической коррекции 7, выход которого соединен с-первыми входами блока 8 сумв полях электромагнитов 2 и 3, демодуляторы 13 и 14, схемы сравнения 15 и 16, а также интеграторы 17 и 18, подключенные каждый к одному из входов соответствующего модулятора 22 и 23, образуют два замкнутых контура регулирования величины индукции в зазорах между инерционным элементом 1 и электромагнитами 2 и 3. Кроме этого, на чертеже обозначен измеритель суммы периодов 26, задатчик кода суммы периодов 27, третья схема сравнения 28, цифроаналоговьм преобразователь 29, третий интегратор 30, причем входы измерителя суммы периодов 26 подключены к выходам управляемых по частоте генераторов 20 и 21, один вход схемы сравнения 28 соединен с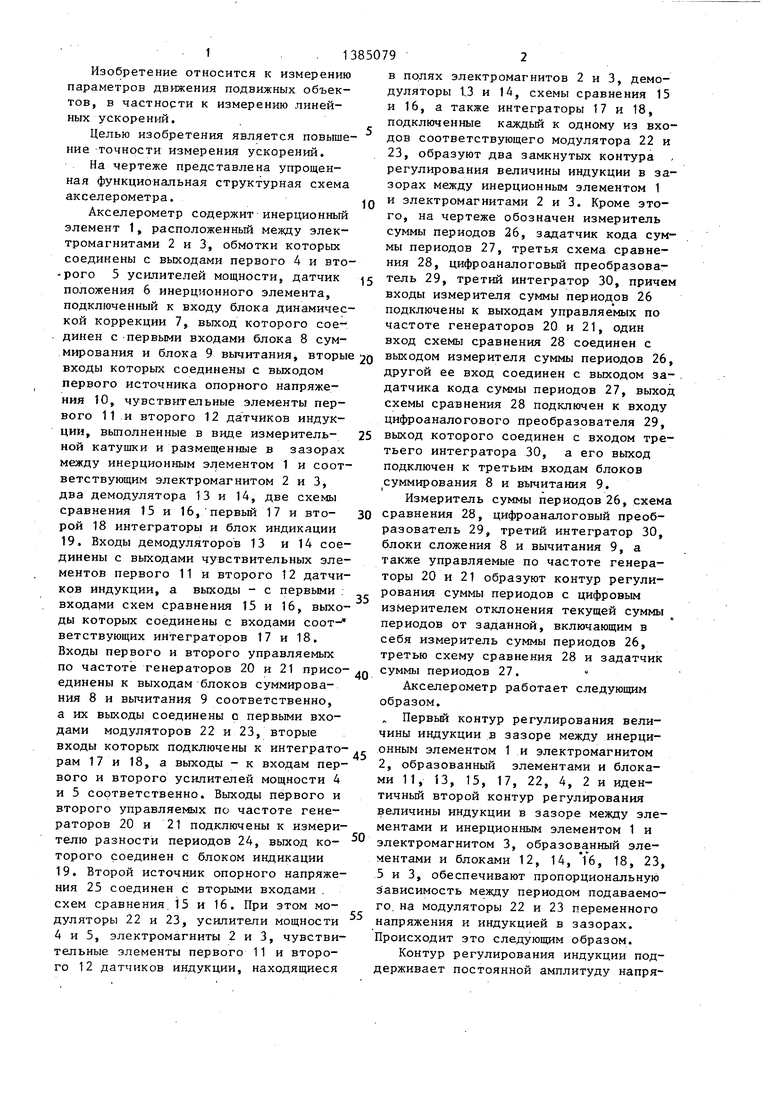
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 1983 |
|
SU1101744A1 |
| Бесконтактный задатчик силы | 1983 |
|
SU1257524A1 |
| Компенсационный акселерометр | 1981 |
|
SU1068820A1 |
| Акселерометр | 1983 |
|
SU1109647A1 |
| Компенсационный акселерометр | 1982 |
|
SU1129524A1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| Цифровой феррозондовый магнитометр | 1982 |
|
SU1114997A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1993 |
|
RU2099719C1 |
Изобретение относится к измерению линейных ускорений. Цель изобретения - повышение точности измерения ускорений. Стабилизируя напряжение с измеряемой катушки, размещенной в зазоре электромагнита, можно получить прямо пропорциональную зависимость между периодом и амплитудой .// I б индукции. Если в процессе стабилизации суммы периодов нарушится их разность, то в этом случае произойдет нарушение равновесия сил, действующих на инерционный элемент 1. Он сместится, напряжение с датчика 6 через блок 7 коррекции воздействует на уп-« равляемые генераторы 20 и 21, и разность периодов восстановится. Восстановится и равновесие сил,, действующих на инерционный элемент 1. После переходного процесса в акселерометре установится баланс сил, действующих на. инерционньй элемент 1 . Сумма периодов, а также индукций будет постоянной, а разность периодов пропорциональна измеряемому ускорению. Эта разность измеряется в измерителе 24 разности периодов и подается на блок 19 индикации. 1 ил. о сл 00 00 ел о со 
мирования и блока 9 вычитания, вторые 2о выходом измерителя суммы периодов 26,
входы которых соединены с выходом первого источника опорного напряжения 10, чувствительные элементы первого 11 и второго 12 датчиков индукции, вьтолненные в виде измерительной катушки и размещенные в зазорах между инерционным элементом 1 и соответствующим электромагнитом 2 и 3, два демодулятора 13 и 14, две схемы сравнения 15 и 16, первый 17 и второй 18 интеграторы и блок индикации 19. Входы демодуляторов 13 и 14 соединены с выходами чувствительных элементов первого 11 и второго 12 датчиков индукции, а выходы - с первыми . входами схем сравнения 15 и 16, выходы которых соединены с входами соот- ветствующих интеграторов 17 и 18. Входы первого и второго управляемых по частоте генераторов 20 и 21 присо- единены к выходам блоков суммирования 8 и вычитания 9 соответственно, а их выходы соединены с первыми входами модуляторов 22 и 23, вторые входы которых подключены к интеграторам 17 и 18, а выходы - к входам первого и второго усилителей мощности 4 и 5 соответственно. Выходы первого и второго управляемых по частоте генераторов 20 и 21 подключены к измерителю разности периодов 24, выход которого соединен с блоком индикации 19. Второй источник опорного напряже ния 25 соединен с вторыми входами . схем сравнения.15 и 16. При этом модуляторы 22 и 23, усилители мощности 4 и 5, электромагниты 2 и 3, чувствительные элементы первого 11 и второго 12 датчиков индукции, находящиеся
25
,Q
другой ее вход соединен с выходом за- датчика кода суммы периодов 27, выход схемы сравнения 28 подключен к входу цифроаналогового преобразователя 29, выход которого соединен с входом третьего интегратора 30, а его выход подключен к третьим входам блоков суммирования 8 и вычитания 9.
Измеритель суммы периодов 26, схема 30 сравнения 28, цифроаналоговый преобразователь 29, третий интегратор 30, блоки сложения 8 и вычитания 9, а также управляемые по частоте генераторы 20 и 21 образуют контур регулирования суммы периодов с цифровым измерителем отклонения текущей суммы периодов от заданной, включающим в себя измеритель суммы периодов 26, третью схему сравнения 28 и задатчик суммы периодов 27.
Акселерометр работает следующим образом.
Первьй контур регулирования величины индукции в зазоре между инерционным элементом 1 и электромагнитом 2, образованный элементами и блоками 11, 13, 15, 17, 22, 4, 2 и иден- тичньй второй контур регулирования величины индукции в зазоре между элементами и инерционным элементом 1 и электромагнитом 3, образованный эле
ментами и блоками 12, 14, 16, 18, 23, 5 и 3, обеспечивают пропорциональную з ависимость между периодом подаваемого, на модуляторы 22 и 23 переменного напряжения и индукцией в зазорах. Происходит это следующим образом.
Контур регулирования индукции под5
0
5
держивает постоянной амплитуду напряжения, снимаемого с чувствительного элемента датчика индукции 11 (12), выполненного в виде измерительной катушки. Это напряжение можно представить:
и
2jr, „ . 2Ц sin--t
Частота, а следовательно, период этого напряжения задаются управляемым по частоте генератором 20 (21). Поэтому для всех значений частоты.можно записать:
В
2Jrk
де В
1акс
щдкс
амплитудное значение индукции в зазоре; Up - напряжение на выходе источника 25 опорного сигнала;
Т - период напряжения на выходе управляемого генератора, 2ffk - постоянный коэффициент.
Таким образом, стабилизируя напря-25 интегратора 30, которое в свою очежение (точнее его амплитудное значение), с .измеряемой катушки, размещенной в зазоре электромагнита, можно получить прямо пропорциональную зависимость между периодом Т и амплитудой индукции В .
В установившемся режиме частота управляемого генератора 20 определяется выходным напряжением блока суммирования 8, которое равно сумме выходных напряжений первого источника опорного напряжения 10, блока динамической коррекции 7 и третьего интегратора 30. Частота управляемого генератора 21 определяется выходным напряжением блока вычитания 9, которое равно сумме опорного напряжения первого источника 10 и выходного напряжения третьего интегратора 30 за вычетом выходного напряжения блока динамической коррекции 7. При смещении инерционного элемента 1 под действием инерционных сил, например, влево напряжение с датчика положения 6 через блок динамической коррекции 7, где вырабатываются и добавляются к нему напряжения, пропорциональные , производным от перемещения, подается на блоки суммирования 8 и вычитания 9. Проходя через блок суммирования 8 со знаком +, оно увеличивает частоту управляемого генератора 20, уменьшив тем самым индукцию в зазоре электромагнита 2. Проходя через блок
30
35
40
45
50
55
редь через блоки суммирования 8 и вы читания 9 без изменения знака изменя ет частоты управляемых генераторов 2 и 21. Напряжение третьего интегратора 30 Изменяется до тех пор, пока код измеренной суммы периодов с измерителя суммы периодов 26 не станет рав ным коду с задатчйка 27 кода суммы периодов.
Если в процессе стабилизации суммы периодов нарушится их разность, то в этом случае произойдет нарушение равновесия сил, действукнцих на инерционный элемент 1. Оно смещается и тогда напряжение с датчика рассогласования 6 через блок динамической коррекции 7 воздействует на управляемые генераторы 20 и 21 и разность .периодов вoccтaнaвJ ивaeтcя. При этом восстанавливается равновесие сил, действующих на инерционный элемент 1 ..
Таким образом, после переходного процесса в акселерометре устанавлива ется баланс сил, действующих на инер .ционный элемент 1, при этом сумма пе риодов, а также индукций постоянная наперед заданная величина, а разност периодов пропорциональна измеряемому ускорению. Эта разность измеряется в измерителе 24 разности периодов 21 и подается на блок индикации 19.
вычитания 9 со
знаком -,
оно уменьшает частоту управляемого генератора 21, увеличив тем самым индукцию в зазоре электромагнита 3. Изменение индукций достигает такой величины, что получающаяся новая разность маг-. нитных сил уравновешивает инерционную силу, вызванную наличием измеряемого
ускорения.
Рассмотрим случай, когда ускорение остается постоянным, а самопроизвольно изменились частоты управляемых по частоте генераторов 20 и 21. В
этом случае изменяется текущее значение суммы периодов, измеренное измерителем суммы периодов 26, на выходе третьей схемы сравнения 28 появляется код рассогласования текущего
значения относительно заданного за- датчиком 27. Этот код преобразуется в цифроаналоговом преобразователе 29 в напряжение, которое приводит к изменению выходного напряжения третьего
0
5
0
5
0
5
редь через блоки суммирования 8 и вычитания 9 без изменения знака изменяет частоты управляемых генераторов 20 и 21. Напряжение третьего интегратора 30 Изменяется до тех пор, пока код измеренной суммы периодов с измерителя суммы периодов 26 не станет равным коду с задатчйка 27 кода суммы периодов.
Если в процессе стабилизации суммы периодов нарушится их разность, то в этом случае произойдет нарушение равновесия сил, действукнцих на инерционный элемент 1. Оно смещается и тогда напряжение с датчика рассогласования 6 через блок динамической коррекции 7 воздействует на управляемые генераторы 20 и 21 и разность .периодов вoccтaнaвJ ивaeтcя. При этом восстанавливается равновесие сил, действующих на инерционный элемент 1 ..
Таким образом, после переходного процесса в акселерометре устанавливается баланс сил, действующих на инер- .ционный элемент 1, при этом сумма периодов, а также индукций постоянная, наперед заданная величина, а разность периодов пропорциональна измеряемому ускорению. Эта разность измеряется в измерителе 24 разности периодов 21 и подается на блок индикации 19.
TI
т,
в., в
Таким образЪм поддерживаются выолнения соотношений, описываемых истемой уравнений;
+ Т const
- Tg ka, + В const j, - Bj k, а где .Т - период переменного тока в
электромагните jO
В индукция в зазоре; - а - измерение ускорения Koscl iHi neHTb пропорциональности.
Введение цифрового контура стаби- jj изации суммы периодов позволяет наиолее полно реализовать преимущества , оторые заключаются в преобразовании инерционных сил в разность периодов,
1385079
Ф о
от цель уско тель пери цифр трет кода мере выхо рато пери трет тьег вход
измеряемую с высокой точностью,
рмула изобретения
Акселерометр по авт. св. №1101744, отличающийся тем, что, с целью повышения точности измерения ускорений, в него введены последова-г тельно соединенные измеритель суммы периодов, третья схема сравнения,, цифроаналоговьм преобразователь и третий интегратор, а также задатчик кода суммы, периодов, причем входы измерения суммы периодов подключены к выходам управляемых по частоте генераторов, выход задатчика кода суммы периодов подключен к второму входу третьей схемы сравнения, а выход третьего интегратора подключен к третьим входам блоков суммирования и вьми20 тания.
| Акселерометр | 1983 |
|
SU1101744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
