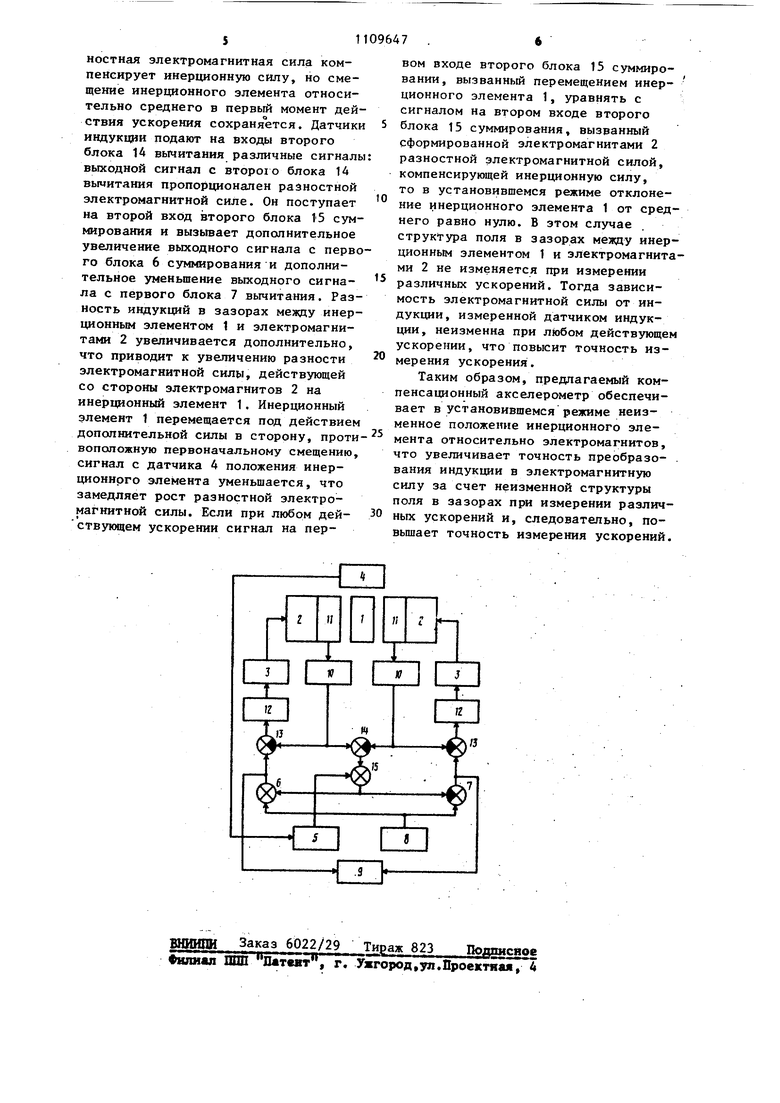
Изобретение относится к приборостроению и предназначено для измере ния ускорения. Известен компенсационный акселерометр, содержащий инерционный элемент, установленные с противоположных сторон от него электромагниты, обмотки которых соединены с выходами соответствующих усилительнопреобразовательных блоков, датчик положения инерционного злемента, подключенный к входу блока динамиче кой коррекции, блок суммирования и блок вычитания, первые входы которы подключены к источнику опорного сиг нала, вторые - к выходу блока динамической коррекции, а выходы - к входам соответствующих усилительнопреобразовательных блоков, и блок индикации, входы которого соединены с выходами усилительно-преобразовательных блоков С JОднако в зтом акселерометре уско рение, пропорциональное разности электромагнитных сил, компенсиоуюших инеопионную силу, вычисляется по разности токов в обмотках электромагнитов, но разность токов, нелиней но связана с разностью электромагни ных сил, причем нелинейность рбусло лена изменением зазоров между элект ромагнитами и инерционным элементом наличием гистерезиса при намагничивании магнитопроводов электромагнитов и инерционного элемента, влияни ем температуры на магнитную проницаемость магнитопроводов. что обуславливает высокую погрешность измерения ускорения. Наиболее близким к предлагаемому по технической сущности и достигаем му результату является компенсацион ный акселерометр, содержащий инерционный элемент, свободно расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами усилительно-преобра зовательных блоков, датчик положени инерционного элемента, подключенный к входу блока динамической коррекци блок суммирования и блок вычитания, первые входы которых подключены к источнику опорного сигнала, вторые к выходу блока динамической коррекции, блок индикации, датчики индукций, чувствительные элементы которых размещены в зазорах между инерционным элементом и.соответствующим электромагнитом, два интегратора и две схемы сравнения, причем первые входы схем сравнения соединены с соответствующими выходами блока суммирования и блока вьг4итания и входами блока индикации, а выходы - с входами интеграторов, выходы которых подключены к соответствующим входам усилительно-преобразовательных блоков, вторые входы схем сравнения подключены к выходам соответствующих датчиков индукции 2J, Недостатком известного акселерометра является недостаточная точность измерения ускорения, обусловенная недостаточной точностью преобразованиязаданной с высокой точностью индукции в электромагнитную силу при изменении зазора между электромагнитами и инерционным элементом. Цепью изобретения является повышение точности измерения ускорения за счет, более точного преобразования индукции в электромагнитную силу. Поставленная цель достигается тем, что в акселерометр, содержащий инерционный элемент, свободно расположенный в зазоре между двумя электромагнитами, обмотки которых соединены с выходами усилительнопреобразовательных блоков, датчик положения инерционного элемента, подключенный к входу блока динамической коррекции, блок суммирования и блок вычитания, первые входы которых подключены к источнику опорного сигнала, блок индикации, датчики индукции, чувствительные элементы КОТОРЫХ размещены в зазорах между инерционным элементом и соответствующим электромагнитом, два интегратора и две схемы сравнения, причем первые входь схем сравнения соединены с соответствующими выходами блока суммирования и блока вьиитания и входами блока индикации, а выходы - с входами интеграторов, выходы которых подключены к соответствующим входам усилительно-преобразовательных блоков, вторые входы схем сравнения подключены к выходам соответствующих датчиков индукции, введены второй блок вычитания и второй блок суммирования, причем входы второго блока вычитания подключены к соответствующим датчикам индукции, выход - к второму входу 31 второго блока суммирования, первый вход которого подключен к выходу блока динамической коррекции, а выход -- к вторым входам первого блока суммирования и первого блока вычитания. На чертеже приведена функциональная схема предлагаемого акселерометра. Акселерометр содержит инерционный элемент 1, расположенный в зазоре между двумя электромагнитами 2, обмотки которых соединены с выходами усилительно-преобразовательных блоков 3, датчик 4 положения инерционного элемента. подключенный к блока 5 динамической коррекции, первый блок 6 суммирования, первый блок 7 вьиитания, первые входы которых подключены к источнику 8 опорного сигнала, блок 9 индикации, датчики 10 индукции, чувствительные элементы 11 которых размещены в зазора между инерционным элементом и соответствующим электромагнитом, два интегратора 12, две схемы 13 сравнения, второй блок 14 вычитания и второй блок 15 суммирования, причем первые входы схем сравнения соедине ны с соответствующими выходами перврго блока суммирования и первого блока вычитания и с входами блока индикации, а выходы - с входами интеграторов, выходы которых подклю чены к соответствующим входам усили тельно-преобразовательных блоков, вторые входы схем сравнения и входы второго блока вычитания подключены к выходам соответствующих датчиков индукции, выход второго блока вычитания подключен к второму входу вто рого блока суммирования, первый вхо которого подключен к выходу блока динамической коррекции, а выход к вторым входам первого блока сумми рования и первого блока вычитания. Акселерометр работает следующим образом. При отсутствии ускорения инерцио ный элемент 1 находится в среднем положении относительно электромагни тов 2. Датчик 4 положения инерционного элемента вырабатывает нулевой сигнал. Нулевой сигнал будет .и на выходе блока 5 динамической коррекции. Силы, действующие на „инерционный элемент 1 со стороны электромагнитов 2 , а следовательно, и 7 индукции, замеренные датчиками 10 индукции, равны. На выходе второго блока 14 вычитания нулевой сигнал. В связи с тем, что на оба входа второго блока 15 суммирования поступают нулевые сигналы, нулевой сигнал будет и на выходе этого блока. Тогда с выходов первого блока 6 суммирования и первого блока 7 вычитания на схемы 13 сравнения поступают напряжения, равные напряжению с источника 8 опорного сигнала. Регуляторы индукций, каждый из которых включает в себя датчик 10 индукции с чувствительным элементом 11, схему 13 сравнения , интегратор 12, усилительнппреобразовательньм блок 3 и электромагнит 2, задают равные индукции в зазорах мезвду инерционным элементом 1 и электромагнитами 2, следовательно, равны и силы, действующие на инерционный элемент 1 со стороны электромагнитов 2. На блок 9 индикации поступают равные напряжения с первого блока 6 суммирования и первого блока 7 вычитания. Блок индицирует нулевое ускорение. В Случае действия ускорения на компенсационный акселерометр имеет место смещение элемента 1 относительно электромагнитов 2. Датчик 4 положения вырабатывает сигнал, который через блок 5 динамической коррекции подается на первый вхоп второго блока 15 суммирования. В первый момент после начала действия ускорения на инерционный элемент 1 электромагниты 2 вырабатывают равные силы и индукции в зазорах между инергщонным элементом 1 и электромагнитами 2, следовательно, с второго блока 14 на второй вход второго блока 15 суммирования в первый момент подается ну- левое напряжение. Сигнал, обусловленный перемещением инерционного элемента, поступает с второго блока 15 суммирования на первый блок 6 суммирования, где соединяется с опорным сигналом и поступает на первый блок вычитания, где вычитается из опорного сигнала. На схемы сравнения поступают разные напряжения. Регуляторы индукции задают различные индукции в зазорах между инерционным элементом 1 и электромагнитами 2, следовательно, различны и силы, действующие на инерционный элемент 1 со стороны электромагнитов 2. Разностная электромагнитная сила компенсирует инерционную силу, но смещение инерционного элемента относительно среднего в первьш момент действия ускорения сохраняется. Датчики индукции подают на входы второго блока 1А вычитания различные сигналы выходной сигнал с второю блока 14 вычитания пропорционален разностной электромагнитной силе. Он поступает на второй вход второго блока 15 суммирования и вызьюает дополнительное увеличение выходного сигнала с перво го блока 6 суммирования и дополнительное уменьшение выходного сигнала с первого блока 7 вычитания. Разность индукций в зазорах между инергщонным элементом 1 и электромагнитами 2 увеличивается дополнительно, что приводит к увеличению разности электромагнитной силы, действующей со стороны электромагнитов 2 на инерционный элемент 1. Инерционный элемент 1 перемещается под действием дополнительной силы в сторону, проти вопсложную первоначальному смещению сигнал с датчика 4 положения инерционного элемента уменьшается, что замедляет рост разностной электромагнитной силы. Если при любом действующем ускорении сигнал на первом входе второго блока 15 суммировании, вызванный перемещением инерционного элемента 1, уравнять с сигналом на втором входе второго блока 15 суммирования, вызванный сформированной электромагнитами 2 разностной электромагнитной силой, компенсирующей инерционную силу, то в установившемся режиме отклонение инерционного элемента 1 от среднего равно нулю. В этом случае структура поля в зазорах между инерционным элементом 1 и электромагнитами 2 не изменяется при измерении различных ускорений. Тогда зависимость электромагнитной силы от индукции, измеренной датчиком индукции, неизменна при любом действующем ускорении, что повысит точность измерения ускорения. Таким образом, предлагаемый компенсационный акселерометр обеспечивает в установившемся режиме неизменное положение инерционного элемента относительно электромагнитов, что увеличивает точность преобразо- . вания индукции в электромагнитную силу за счет неизменной структуры поля в зазорах при измерении различных ускорений и, следовательно, повьш1ает точность измерения ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный акселерометр | 1982 |
|
SU1129524A1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| Компенсационный акселерометр | 1981 |
|
SU1068820A1 |
| Акселерометр | 1983 |
|
SU1101744A1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| Акселерометр | 1986 |
|
SU1385079A2 |
| Трехкомпонентный акселерометр | 1983 |
|
SU1137397A1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |
| Устройство для измерения параметров вибрации | 1982 |
|
SU1024855A1 |
| Акселерометр | 1989 |
|
SU1679396A1 |
АКСЕЛЕРОМЕТР, содержащий инерционный элемент, свободно расположенный в зазоре С езкду двумя электромагнитами, обмотки которых соединены с выходами усилительно-преобразовательных блоков, датчик положения инерционного элемента, подключенный к входу блока динамической коррекции, блок суммирования и блок вычитания, первые входы которых подключены к источнику опорного сигнала, блок индикации, датчики индукции, чувствительные элементы которых размещены в зазорах между инерционным элементом и соответствукицим электромагнитом, два интегратора и две схемы сравнения, причем первые входы схем сравнения соединены с соответствукшщми выходами блока суммированиг и блока вычитания и входами блока индикации, a выходы с входами интеграторов, выходы которых подключены к соответствующим входам усилительно-преобразовательных блоков, вторые входы схем сравнения подключены к выходам «оответствующих датчиков индукции, отличающийся тем, что, с целью повьщ1ения точности, в него введены второй блок вычитания и второй блок суммирования, причем входы второго блока вычитания подкпючены к б оотВ. ветствующим датчикам индукции, выход - к второму входу второго блока суммирования, первый вход которого подключен к выходу блока динамической коррекции, a «ыход - к вторым входам первого блока суммирования и первого блока вычитания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3090239, кп | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Компенсационный акселерометр | 1979 |
|
SU824062A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
