Изобретение относится к автоматическому регулированию параметров объектов в системах автоматизированного управления промышленных установок и может быть использовано, например, для регулирования температуры, давления, расхода, скорости и других параметров, текущие значения которых могут быть представлены в виде аналогового электрического сигнала.
Известен широтно-импульсный регулятор температуры для объектов с запаздыванием, содержащий блок преобразования и блок связи и возмущению, входы которых связаны со входами регулятора, блок сравнения, выход которого через последовательно соединенные усилитель, широтно-импульсный модулятор и сумматор подключен к объекту регулирования, а входы связаны с входом блока преобразования непосредственно и объектом регулирования через термодатчик.
Недостатком аналога являются пониженные динамические характеристики.
Наиболее близким по технической сущности к заявляемому изобретению аналогом, выбранным в качестве прототипа, являются устройство для автоматического регулирования, содержащее датчик и задатчик регулируемого параметра, подключенные к блоку сравнения, блок дифференцирования, соединенный входом с датчиком регулируемого параметра и подключенный выходом вместе с выходом блока сравнения к формирователю управляющего сигнала, генератор импульсов с частотно-задающей цепью и исполнительный орган.
Недостатком прототипа являются низкие динамические характеристики, т.к. формирователь управляющего сигналг. выполненный в виде сумматора, формирует сигнал управления как алгебраическую сумму сигналов, пропорциональных текущему значению параметра, и дифференциальной составляющей сигнала обратной связи (сигнала датчика), а соотношение составляюСП
с
VI
со О
Ьь
О
XI
щих для обеспечения требуемого качества регулирования зависит от динамических характеристик конкретного объекта управления, кроме того, в случае программного измерения регулируемого параметра, например, при постоянной скорости изменения задания и алгебраической сумме сигналов датчика и задатчика равной нулю, дифференциальная составляющая сигнала обратной связи не равна нулю и направлена на изменение управляющего воздействия в сторону уменьшения скорости изменения регулируемого параметра, что приводит процесс управления в режим перерегулирования.
Целью изобретения является улучшение динамических характеристик процесса регулирования.
Поставленная цель достигается тем, что в автоматическом регуляторе, содержащем датчик и задатчик регулируемого параметра, соединенные выходами с соответствующими входами блока сравнения, формирователь управляющего сигнала, и исполнительный орган,, выход которого является выходом автоматического регулятора, формирователь управляющего сигнала содержит два аналого-частотных преобразователя и частотно-фазовый дискриминатор, причем входы аналого-частотных преобразователей соединены с выходом блока сравнения, их выходы соединены с соответствующими входами частотно-фазового дискриминатора, выход которого соединен с входом исполнительного органа.
При сравнении с прототипом и аналогом выявлены отличительные признаки: формирователь управляющего сигнала содержит два аналого-частотных преобразователя и частотно-фазовый дискриминатор, что позволяет утверждать, что позволяет утверждать, что данное изобретение соответствует критерию новизна.
Указанные отличительные признаки реализуют процесс поэтапного программного регулирования, включающий основные свойства позиционного и непрерывного методов регулирования, и обеспечивают новое качество процесса автоматического управления путем реализации управляющего воздействия пропорционального скважости управляющих сигналов частотно-фазового дискриминатора, текущее значение которой зависит от разности периодо в следования импульсов аналого-частотных преобразователей выходного сигнала блока сравнения, при этом частоты следования импульсов аналого-частотных преобразователей совпадают при отсутствии сигнала с блока сравнения, т.е. при сигнале рассогласования, равном нулю, от скорости изменения разности периодов следования импульсов, от знака времени ее воздействия на систему управления, зависящих от динамических характеристик
объекта управления, автоматически учитывающихся алгоритмом функционирования изобретения, являющимся, таким образфм, самонастраивающимся устройством.
Данное свойство улучшает динамиче0 ские характеристики процесса регулирования и позволяет сделать вывод о соответствии изобретения критерию существенные отличия.
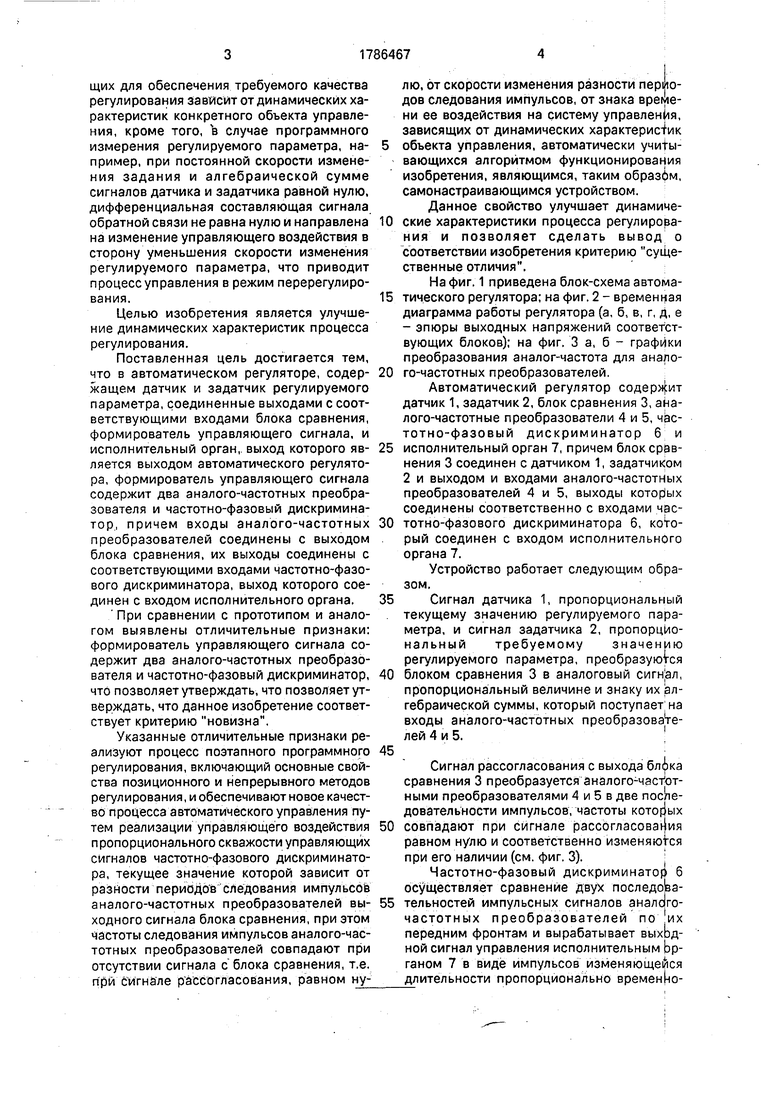
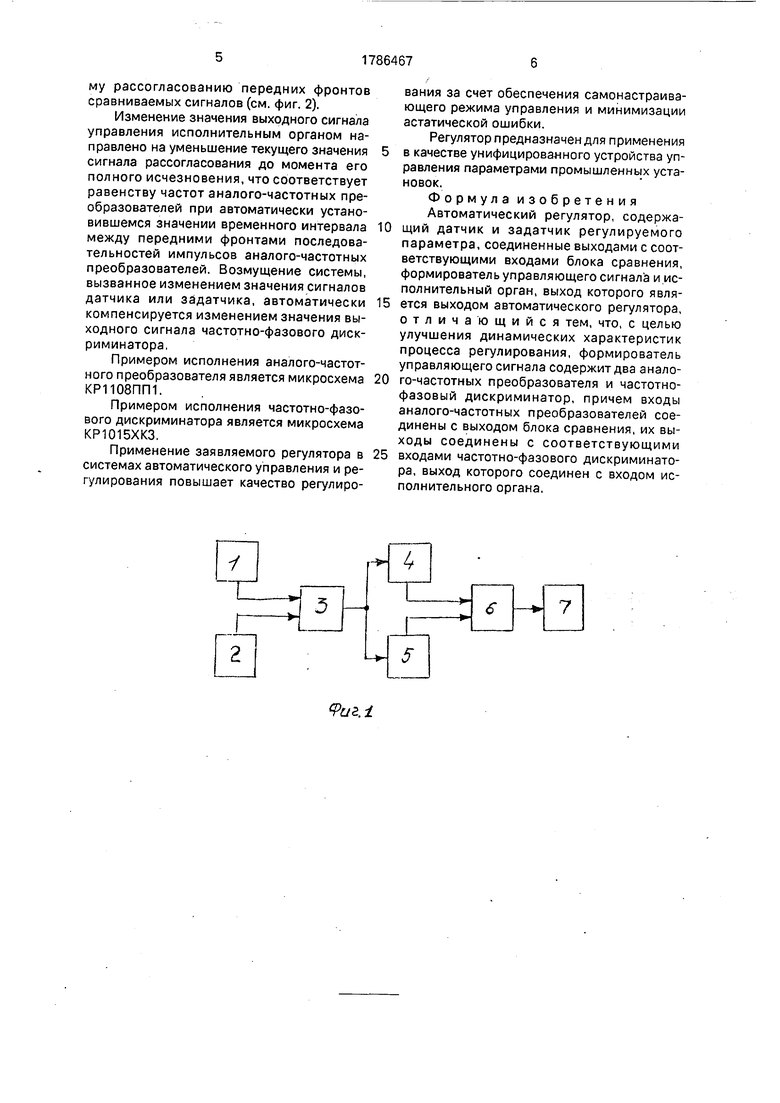
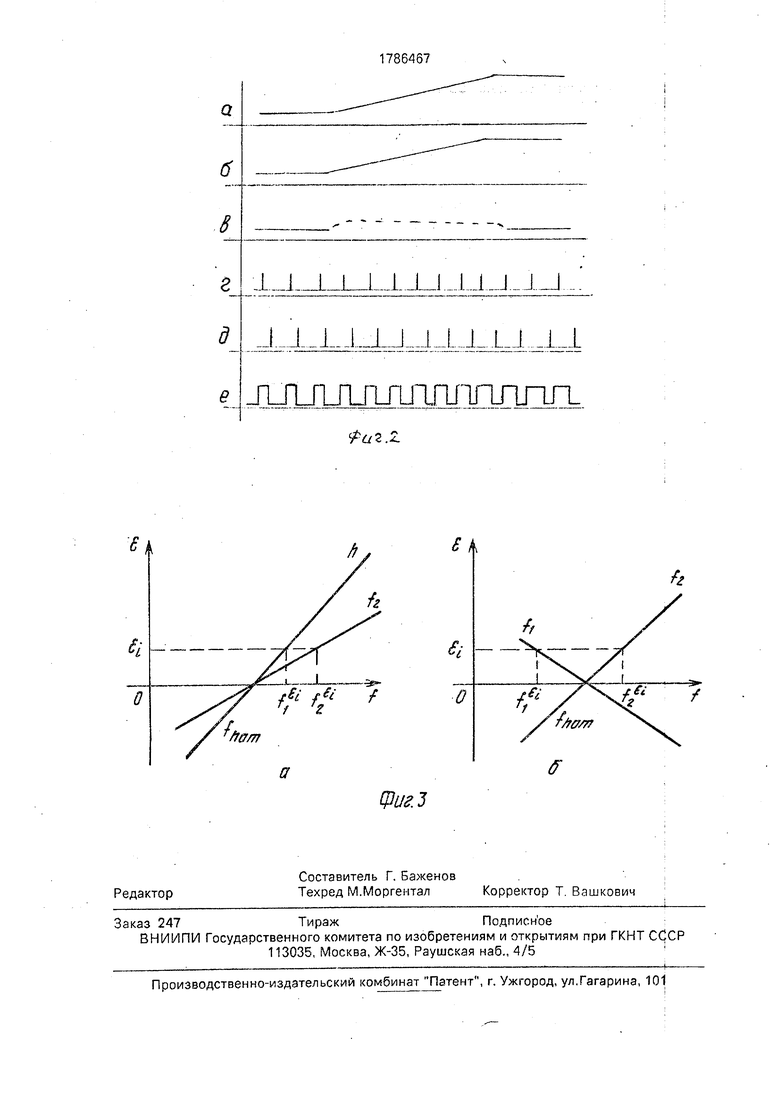
На фиг. 1 приведена блок-схема автома5 тического регулятора; на фиг. 2 - временная диаграмма работы регулятора (а, б, в, г, д, е - эпюры выходных напряжений соответствующих блоков); на фиг. 3 а, б - графики преобразования аналог-частота для анало0 го-частотных преобразователей.
Автоматический регулятор содержит датчик 1, задатчик 2, блок сравнения 3, ана- лого-частотные преобразователи 4 и 5, час- тотно-фазовый дискриминатор 6 и
5 исполнительный орган 7, причем блок сравнения 3 соединен с датчиком 1, задатчиком 2 и выходом и входами аналого-частотных преобразователей 4 и 5, выходы котор ых соединены соответственно с входами час0 тотно-фазового дискриминатора 6, который соединен с входом исполнительного органа 7.
Устройство работает следующим образом.
5 Сигнал датчика 1, пропорциональный . текущему значению регулируемого параметра, и сигнал задатчика 2, пропорциональный требуемому значению регулируемого параметра, преобразуются
0 блоком сравнения 3 в аналоговый сигнал, пропорциональный величине и знаку их алгебраической суммы, который поступает; на входы аналого-частотных преобразователей 4 и 5.
5:
Сигнал рассогласования с выхода сравнения 3 преобразуется аналого-частЬт- ными преобразователями 4 и 5 в две последовательности импульсов, частоты котор ых
0 совпадают при сигнале рассогласования равном нулю и соответственно изменяются при его наличии (см. фиг. 3).
Частотно-фазовый дискриминатор 6 осуществляет сравнение двух последо ва5 тельностей импульсных сигналов анало го- частотных преобразователей по их передним фронтам и вырабатывает выходной сигнал управления исполнительным Ьр- ганом 7 в виде импульсов изменяющейся длительности пропорционально временному рассогласованию передних фронтов сравниваемых сигналов (см. фиг. 2).
Изменение значения выходного сигнала управления исполнительным органом направлено на уменьшение текущего значения сигнала рассогласования до момента его полного исчезновения, что соответствует равенству частот аналого-частотных преобразователей при автоматически установившемся значении временного интервала между передними фронтами последовательностей импульсов аналого-частотных преобразователей. Возмущение системы, вызванное изменением значения сигналов датчика или задатчика, автоматически компенсируется изменением значения выходного сигнала частотно-фазового дискриминатора,
Примером исполнения аналого-частот- ного преобразователя является микросхема КР1108ПП1.
Примером исполнения частотно-фазового дискриминатора является микросхема КР1015ХКЗ,
Применение заявляемого регулятора в системах автоматического управления и регулирования повышает качество регулирования за счет обеспечения самонастраивающего режима управления и минимизации астатической ошибки.
Регулятор предназначен для применения в качестве унифицированного устройства управления параметрами промышленных установок.
Формула изобретения Автоматический регулятор, содержащий датчик и задатчик регулируемого параметра, соединенные выходами с соответствующими входами блока сравнения, формирователь управляющего сигнала и исполнительный орган, выход которого является выходом автоматического регулятора, отличающийся тем, что, с целью улучшения динамических характеристик процесса регулирования, формирователь управляющего сигнала содержит два аналого-частотных преобразователя и частотно- фазовый дискриминатор, причем входы аналого-частотных преобразователей соединены с выходом блока сравнения, их выходы соединены с соответствующими входами частотно-фазового дискриминатора, выход которого соединен с входом исполнительного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Следящий привод | 1979 |
|
SU807207A1 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Система автоматического регулирования загрузки мельницы | 1976 |
|
SU621377A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025257C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
Автоматический регулятор может быть использован для регулирования температуры и позволяет улучшить динамические характеристики процесса регулирования путем включения в него датчика и задатчика регулируемого параметра блока сравнения, формирователя управляющего сигнала в виде аналого-частотных преобразователей и частотно-фазового дискриминатора. Входы аналого-частотных преобразователей и частотно-фазового дискриминатора, подключены к выходу блока сравнения, а их выходы - к входам частотно-фазового дискриминатора, выход которого подключен к исполнительному органу. 3 ил.
9uz.l
rf
8
Z ..lJ.J..
l.Li-UU J L LLJL l l
e
JllLfL.rLrU UTnJTUnj-irL
| ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 0 |
|
SU408286A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматического регулирования | 1982 |
|
SU1059225A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
