(54) СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕСКОПОМ



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Фотоэлектрический гид телескопа | 1977 |
|
SU661500A1 |
| Оптическая следящая система астрономического телескопа | 1980 |
|
SU964585A2 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
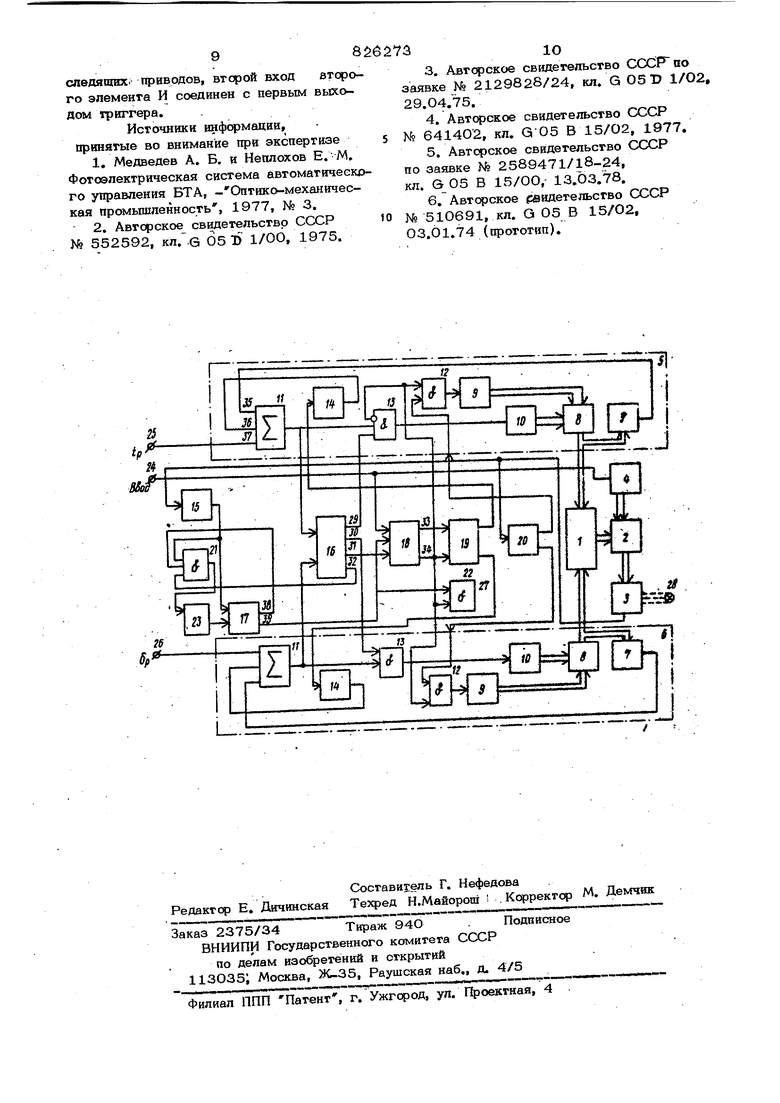
Изобрегение огносигся к астроприбсрск строению и может быть использовано при управлении оптическими телескопами. Известны системы управления reneciko uoM, содержащие фотоэлектрический анали затор, используемый для автоматической коррекции (гидирования). положения телеокопа путем выработки сигнала рассогласования по смещению звезды с оптической оси фотоэлектрического аяапкаате РаГ11.21.з, . Для,первоначального наведения фотоэлектрического анализатора на гидировочную звезду в известных системах применяются каретки, устанавливаемые на телескопе и перемещающие фотоэпектрический анализатор в двух взаимно перпендик лярных направлениях l}, . В системах наведение проч изводится полуавтоматически с участием оператора, а в системе автоматически, однако гфи этом требуется большое поле зрения анализатора, что (грнводит к ухудшению чувствительности системы по световому потоку вз-эа. уровня шумсй. В системах l j.ta, зЗ, И коррекция положения телескопа, обеспечивающая после иаведенея твяеск«1а по заданным координатам ириведенйе исследуемов звеэды на оптическую ось телескопа, осуществляется при участии оператора полуавтоматическим, путем. Наиболее близкой к предлагаемЫ1 является система управления телескопом, содержащая первый и вторсй элемеяи И, каретки с фотоэлектронным умножителем, причем к входам кареток подключен блок .дистанцисжного управления, вход KOTOporq соедини с входами триггера в системы управления телескопом, выход фотоэлектрснкного умножителя соедвнеи с входом блока контроля в через формщэователь сигнала ошибки - с входами соответствевво первого в второго следящих проборов, вторые входы которых подключены соответсгве1гао к первому в BTqpoMy вькодам первого блсжа сравнения. третьи входы - ко вгфому и третьему . входам системы управления телескопом, четвертые входы - к первому выходу: триг гера, а первые выходы - к соответст вующим входам телескопа б. Недостатком этой системы является низкое быстродействие процесса первоначального наведения телескопа на исследуемую звезду и фотоэлектрического умножителя на гидировочную звезду, являю.7 щееся следствием необходимости оператору отождествления (нахождения) этих звезд В поле зрения видеоконтрольного устройства и осуществления полуавтоматической коррекции положения, Кроме того, известная система имеет низкую инфqзмaциoннyю надежность проЦбсса управления, выражающуюся в том, что при исчезновении изображения гидировочнсй звезды, например из-за облачности а также в других случаях, когда это изобрахадние не различимо на фоне неба, процесс управления телескопом происходит неправильно. Имеющийся в системе 4 j контроль таких ситуаций не является непрерывным, так , как функционирует только в режимах, когда происходит одновремен ное перемещение коррекционной пластины и, как следствие, этого перемещения тетескопа, в то время, как в системе s J , контроль таких ситуаций осуществляется постоянно. Цель изобретения - повышение точности и надежности системы, Поставленная цель достигается тем, что в системе установлены второй блок сравнения, регистр и сканЕфующее устройство, входы которого соеди 1ены с соответствующими выходами триггераг а выходы - с пятыми входами соответственно первого и второго следящих приводов, вы ход блока контроля соединен с первым входом BTq3oro блока сравнения и первь1М входом первого элемента И, второй вход которого соединен с первым выходом вто рого блока сравнения, третий вход - с третьим выходом первого блока сравнения а выход через регистр - со вторым входом второго блока сравнения, второй выход котсрого соединен.с первым входом второго элемента И и вторым входом триггера, третий вход которого соединен с четвертым выходом первого блока сравнения, первый и второй входы которого соединены соответственно со вторыми выходами первого и второго следящих приводов, второй вход второго элемента И соединен с первым выходом триггера. В предлагаемой системе процесс ка-, ведения телескопа на исследуемую звезду происходит автоматически без участия onepaTq a и включает в себя этап регистрации и запоминания светового потока фона неба, KOTqpbrii происходит при приближении оптической оси телескопа к направлению на исследуемую звезду. По окончании установки телескопа, в том случае, если гидировочная звезда не оказьшается в достаточно узком, для o6ei спечения низкого уровня шумов, поле зрения фотоэлектрического анализатора, то включается режим поиска гидировочной звезды, осуществляемый путем перемещения телескопа по траектории сканирования, причем обнаружение этой звезды осуществляется сравнением текущего светового потока с величиной светового потока фона неба. Это сравнение далее происходит и при автоматическом :гидировании, что позволяет выявить исчезновение гидировочной звезды из поля зрения и перевести систему управления на режим программного управления без .обратной связи по фотоэлектрическому каналу. Функциональная схема устройства представлена на чертеже. На телескопе 1 установлены каретки 2 с расположенным на них фотоэлектронным умножителем (ФЭУ) 3, Каретки управляются блоком 4 дистанционного управления. Первый и второй следящие приводы 5 и 6 содержат преобразователь 7 угол-код, редуктор 8, первый исполнительный механизм 9, второй исполнительный механизм 1О, сумматор 11, элементы И 12 и 13, регистр 14, Со следящими приводами 5 и 6 связаны блок 15 контроля, первый и второй блоки 16 и 17 сравнения, триггер 18, устройство 19 сканирования, формирователь 20 сигнала ошибки, первый и второй элементы И 21 и 22, регистр 23. Входы 24-26 системы, выход 27 системы, гиднровочная звезда 28, выходы 2932 блока 16 сравнения, выходы 33 и 34 триггера 18, входы 35-37 сумматсра 11, выходы 38 и 39 блока 17 сравнения. Рассмотрим работу системы на примере телескопа 1 с паралактической монтировкой, у котфого следящий привод 5 осуществляет управление телескопом по оси -fc , .а следящий привод 6 - по оси сГ.;, Система управление телескопом 1 по команде Ввод поступающей на вход 24, одновременно с этой командой на входы 25 и 26 начинают поступать текущие расчетные значения коорди-. наг исследуемого объекта, на который наводится телескоп 1. Наведение телескопа 1 по каждой оси осуществляется путем его вращения через редуктор 8 исполнительным месанизмом 10, управляемым по сигналам рассогласования й между расчетным значением координаты, поступающим на вход 37 сумматора 11 и фактиче ским положением телескопа 1, измеряемы преобразователем 7 и поступающим на вход 35 сумматора. Величина А формируется на выходе сумматора 11. По команде Ввод триггер 18 устанавливается в состояние, при котором на выходах его формируется сигнал О, при этом ga выходах устройства 19 блока сканирования и на выходе регистра 1 4, связанном с входом 36 сумматора 11, формируется код О. Блок 16 сравнениу. производит анализ . величины рассогласования A-j по каждой оси. Пусть в момент начала наведения телескопа 1 величина рассогласования по обеим осям больше Д щ , где & щ - зона измерения фона (обычно щ составляет 10-4О ). Тогда на выходах 29 и 30 блока 16 сравнения устанавливается сигнал 1, при котором открьшаются элемен ты И 13 и код рассогласования поступает на исполнительный механизм 10, Если в процессе наведения телескопа 1 рассогласование по одной из осей станет меньше Лщ, в то время как по друго оно превышает эту величину, движение по первой, прекращается по сигналу блока 16 сравнения, закрьшаюшему соответствующий элемент И 13. Когда рассогласование по обеим осям станет меньше Л щ на выходе 32 блока 16 сравнения сигнал О изменяется на 1 и в процессе последующей обработки до нуля рассогласования производится процесс измерения величины фона неба. Он осуществляется с помощыоФЭУ 3, который каретками 2, управляемыми блоком 4 дистанционного управления установлен по команде Ввод в положение, определяемое величиной расстояния между изображением гидировочной звезды и исследуемой звезды, измеренными в фокальной плоскости ФЭУ 3. Поле зрения ФЭУ выбрано небольшим (Ю, ЗО) для обеспечения низкого уровня шумов. Блок 15 контроля вырабатывае код, пропорциональный текущей величине светового потока, регистрируемого в ФЭУ 3. В течение времени измерения величины фона неба в регистре 23 запомина ется минимальная величина светового потока, зарегистрированная блоком 15 контроля. Указанная операция осущестьпяется путем сравнения блоком 17 сравнеивя к(« дов на выходе блока 15 контроля в регистра 23. Если текущее значение светового потока на выходе блока 15 ксятропя меньще, чем на выходе регистра 23, го за счет того, что на вьосоде 38 блока 17 сравнения вырабатьюается сигнал 1, эта величина записьшается через открытый элемент И 21 в регистр 23, в противном случае на выходе 38 блока 17 формв руется сигнал О и в регистре 23 код не меняется. Оканчивается процесс измерения фона неба по окончании процесса наведения те лескопа 1, когда рассогласование по обеим осям уменьшается до заданной величины, при этом на выходе 32 блока 16 сравнения формируется сигнал О, закрьюающнй элемент И 21. Рассмотрим случай, к(згда наведение телескопа 1 происходит с ошибкой по положению большой веляч1гаы поля зрения ФЭУ 3..: В этом случае величина светового потока, измеренного блоком 15 ксмтроля, не будет существенно превышать величину фона неба, хранимую в. регистре 23, это выявит блс« 17 сравнения, на выходе 39 которого сформируется сигнал О. Триггер 18 при поступлении таких ciirналов с блока 16 и 17 устанавливается в состояние, при котором только на выходе 33 формфуется сигнал 1, При этом включается режим поиска телескопа 1 гиД1ФОВОЧНОЙ звезды 28, который заключается в том, что на траекторию движения те- тескопа 1-по расчетным величинам tp н Ор накладывается движение по, траектории сканирования, задаваемого устройством 19 сканирования. При этом на выходах устройства 19 блока сканирования форм1-фуется код перемещения по траектории сканирования, которьй через регистры 14 поступает на вход сумматора 11, отабатывается исполнительными механизмами 9 и 10 в следящих приводах 5 и 6. Таким образом, телескоп 1 переместитя в положение, при котором гидировочная везда окажется в поле зрения ФЭУ 3. В том случае телескоп 1 перейдет в режим втоматического гид фования, при котором оложение телескопа 1 непрерывно коррек1груется по положению изображения гидиовочной звезды 28 в фокальной плоскоси ФЭУ 3, тем самым обеспечивается отлеживание телескопа 1 исследуемой звез- , ы. В таком режиме величина светового отока, сформированная блоком 15 контроля существенно больше величины фсиа неба, хранимой регистром .23 и на выходе 39 блока сравн1ения 17 устанавливается сигнал 1, при котсром триггер 18переходит в состояние, когда на его выходе 33 формируется сигнал О , а на выходе 34 - сигнал 1, устройство 19 сканирования прекращает формирование траектории сканирования и по1фавка в по ложении телескопа за счет сканирования хранится Б регистрах 14, Управление телескопом происходит по сигналам формиро вателя 20 сигнала ошибки, котфый выра батывает величину рассогласования по осям -t и а в положении изображения г ид ИР свечной звезды 28 относительно центра поля зрения ФЭУ 3. Эти величины через открытые элементы И 12 поступа ют на исполнительные механизмы 9 телескопа 1, в результате того, что элементы И 13 закрыты сигналом 1 с выхода 34 триггера 18. Исполнительные механизмы Ю при этом не участвуют в управле нии положением телескопа 1. В том случае, если ошибка наведения телескопа 1 настолько мала, что гидиро; вочная звезда 28 оказывается в поле зре ния ФЭУ 3, режим поиска телескопом 1 гидировочной звезды 28 не включается, а сразу ПРОИСХОДИТ переключение в режим автоматического гидиpoвaн ю. Если в процессе автоматического гидирования гидировочная звезда 28 исчезает из поля зрения ФЭУ 3 (например, нз-за облашости), то величина текущего светового потока, формируемая блоком 15 контроля, станет соизмерима с величиной фона неба, хранимой в регистре 23. При этом на выходе 39 блока 17 установится сигнал О, при котором на выходе элемента И 22 сформируется импульсный сигнал, фиксирующий исчезновение изобра жения, гидировочной звезды. Далее,-с задержкой, определяемой длительностью это го импульсного сигнала, по сигналам с выхода 39 блока 17 сравнения триггер 18 переходит в состояние, при котором н его выходе 34 устанавливается сигнал О, по которому закрьшаются элементы И 12, прекращая работу исполнительных механизмов 9, и управление телескопом 1 происходит через открытые элементы И 13 исполнительными механизмами 1О по расчетным значениям tp и Уп посту пающим на входы 25 и 26. У современных отечественных телесно пов (БТА с диаметром зеркала 6 м, установленного в специальной астрофизической обсерватории АН СССР, ЗТШ я 82 8 ЗГА с диаметром зеркала 2,6 м, установленных в Крымской и Бюраканокой астрофизических обсерваториях, и щз,) коррекция положения телескопа и кареток фотогида осуществляется полуавтоматическим путем и делится в среднем А 2-5 мин для каждого наведения телескопа. Среднее количество наведения за наблюдательную ночь 10, Применение предлагаемой системы позоляет производить этот процесс автоматически, без участия оператора, при этом время коррекции уменьшится в 2-3 раза. Формула изобретения Система управления телескопом, содержащая первый и второй элементы И, каретки с фотоэлектронным умножителем, причем к входам кареток подключен блок дистанционного управления, вход которого соединен с первым входом триггера и подалючен к первому входу системы, вы- , ход фотоэлектронного-умножителя соединен с входом блока контроля и через формирователь сигнала ошибки - с первыми входами соответственно перврго и второго следящих приводов, вторые входы которых подключены соответственно к первому и второму выходам первого блока сравнения, третьи выходы - ко второму и третьему.входам системы управления тетелескопом, четвертые входы - к первому выходу триггера, а первые выхо/Щы - к соответствующим входам телескопа, отличающаяся тем, что, с целью повьш1ения точности и надежности системы, в ней установлен второй блок сравнения, регистр и сканирующее устройство, входы котфого соединены с соответствующими выходами триггера, а выходы - с пятыми входами соответственно первого и второго следящих приводов, выход блока контроля соединен с первым входом второго блока сравнения и первым входом первого элемента И, втсрой вход которого соединен с первым вькодом второго блока сравнения, третий вход - с третьим выходом первого блока сравнения, а выход через регистр со входом второго блока сравнения-, второй выход которого соединен с первым входом второго элемента И и вторым входом триггера, третий вход которого соедин(ен с четвертым вькодом перво о блока сравнения, первый и второй входы которого соединены соответственно со вторыми вькодами первого и второго следяагах приводов, второй вход второго элемента И соединен с первым выходом триггера. Источники инфqpмaции, (финятые во внимание при экспертизе 1.Медведев А. Б, и Неплсжов Е, М. Фотоэлектрическая система автоматнческр го управления БТА, -Оптико-механическая промышленность, 1977, № 3, 2.Авторское свидетельство СССР № 552592, кл. в 05 1) 1/00, 1975. 6 310 3.Авторское свидетельство СССР по заявке № 2129828/24, кл. Q 05 ТЭ 1/О2, 29.04.75. 4.Авторское свидетельство СССР N 641402, кл. Q 05 В 15/02, 1977. 5.Автсрское свидетельство СССР по заявке № 2589471/18-24, кп. G05 В 15/00/13.03.78. 6.Авторское свидетельство СССР № 510691, кл. G 05 В 15/02, ОЗ.О1.74 (прототип).
