1
Изобретение относится к автоматическому приборостроению и может найти применение при управлении крупными и средними оптическими телескопами.
Известны системы автоматического управления, содержащее измеритель рассогласования, согласующий преобразователь, корректирующий фильтр, регулятор и исполнительный механизм, который через объект управления и датчик обратной связи соединен с одним из входов измерителя рассогласования 1.
Известны цифровые системы автоматического регулирования, содержащие чувствительный элемент, фильтры, преобразователь аналог-код, вычислительное устройство, преобразователь код-аналог и привод, который через объект и блок обратной связи соединен со входом чувствительного элемента 2.
Повыщение надежности такого рода систем достигается за счет введения в их состав ключа и блока контроля регулируемой величины, который при превыщении регулируемой величиной некоторой максимально допустимой величины с помощью ключа отключает вход привода от выхода формирователя сигнала управления 3.
Наиболее близкой к изобретению по технической сущности является система управления телескопом, содержащая первый привод, выход которого кинематически связан с телескопом, на котором установлены каретка и фотоэлектрический анализатор, выход которого через фильтр подключен ко входу преобразователя а.налог-код, а через блок контроля - к первому входу первого элемента И, в/орой вход которого соединен с первым выходом формирователя корректирующего сигнала, а выход - со входом второго привода, выход которого через преобразователь угол-код соединен с первым входом формирователя корректирующего сигнала, второй вход которого соединен с выходом вычислительного устройства 4.
Недостатком известной системы является ее невысокая точность.
Цель изобретения - повыщение точности системы.
Поставленная цель достигается тем, что в системе установлены пороговое устройство и второй элемент И, первый вход которого соединен со вторым выходом формирователя корректирующего сигнала, второй вход - с выходом преобразователя а;налогкод, а выход - со входом вычислительного устройства, третий вход формирователя корректирующего сигнала через пороговое устройство соединен со своим третьим выходом, вход первого привода соединен с выходом фотоэлектрического анализатора и вторым входом преобразователя угол-код, а выход второго привода кинематически связан с кареткой.
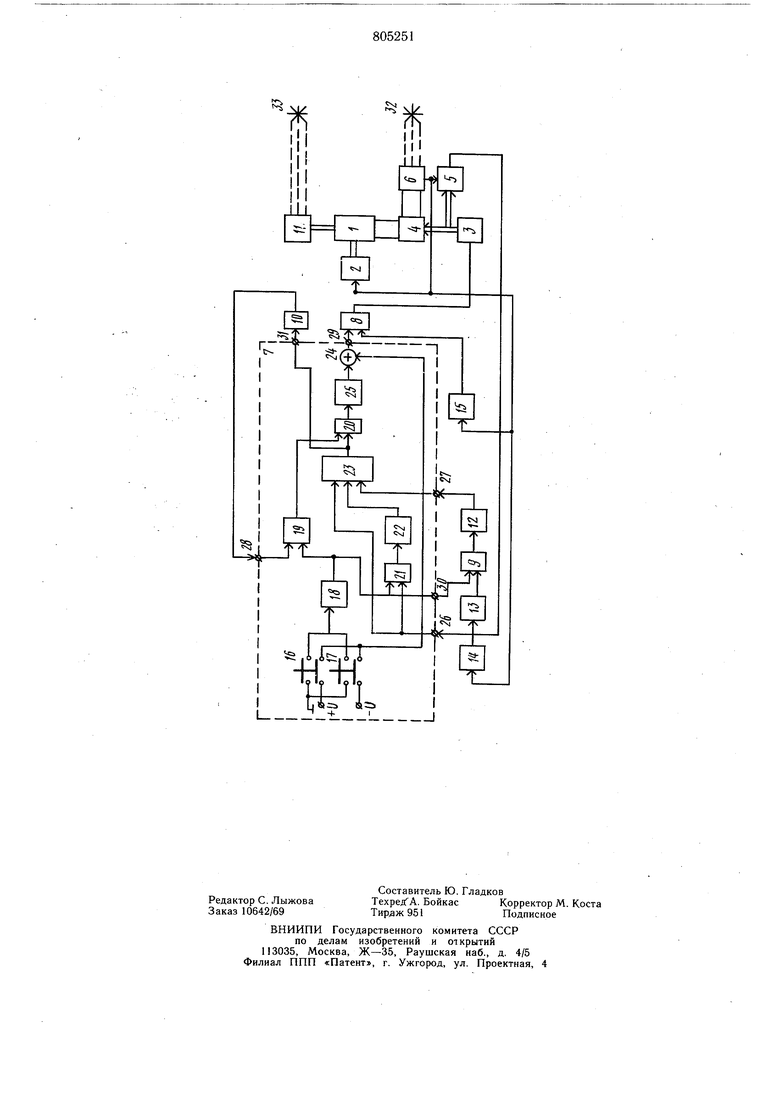
На чертеже представлена блок-схема системы. Схема содержит телескоп 1, первый 2 и второй 3 приводы, каретку 4, преобразователь 5 угол-код, фотоэлектрический анализатор б, формирователь 7 корректирующего сигнала, первый 8 и второй 9 элементы И, пороговое устройство 10, видеоконтрольное устройство 11, вычислительное устройство 12, преобразователь 13 аналог-код, фильтр 14, блок 15 контроля, первый 16 и второй 17 переключатели, генератор 18 одиночных импульсов, триггер 19, третий 20 и четвертый 21 элементы И, регистр 22, первый 23 и второй 24 сумматоры, преобразователь 25 код-аналог, первый 26, второй 27 и третий 28 входы и первый 29, второй 30 и третий 31 выходы формирователя корректирующего сигнала, звезду 32 гидирования, исследуемый объект 33.
Система работает следующим образом.
Допустим, что в начале работы каретка .4 установлена в такое положение, при котором звезда 32 гидирования находится в оптическом центре фотоэлектрического, анализатора 6. Триггер 19 находится в состоянии «О, при котором элемент И 20 закрыт, и,- так как переключатели 16 и 17 отжаты, то сигнал на выходе сумматора 24 равен «О, привод 3 обесточен и- каретка 4 неподвижна.
При появлении ощибки в положении телескопа 1 или при флюктуации изображения звезды 32 гидирования фотоэлектрический анализатор 6 вырабатывает сигнал рассогласования, управляющий телескопом 1 таким образом, чтобы за счет перемещения телескопа 1 обеспечить удержание изображения звезды 32 гидирования в оптическом центре фотоэлектрического анализатора 6. Блок 15 контроля по величине сигнала рассогласования определяет наличие звезды 32 в поле зрения фотоэлектрического анализатора 6 и формирует на своем выходе сигнал «1, открывающий элемент И 8.
Оператор наблюдает на экране видеоконтрольного устройства 11 исследуемый объект 33 в поле зрения телескопа 1, не связанного с перемещением каретки 4. Причем, как правило, в начале наблюдения исс,(1едуемый объект 33 находится не на оптической оси телескопа 1, связанной с центром видеоконтрольного устройства 11. Поэтому далее оператор осуществляет полуатоматическую коррекцию положения телескопа с целью наведения оптической оси телескопа 1 на исследуемый объект 33. Для этого в зависимости от направления необходимого перемещения он включает один из переключателей 16 или 17. При этом сигнал соответствующей полярности проходит через сумматор 24 и открытый элемент И 8 на привод 3, приводя каретку 4 в движение с заданной скоростью. Перемещение каретки 4 приводит к смещению изображения звезды 32 гидирования с центра фотоэлектрического анализатора 6, которое вызывает перемещение привода те лескопа 1. Вращение телескопа 1 приводом 2 с постоянной скоростью происходит при с.мещении изображения звезды гидирования относительно оптического центра фотоэлектрического анализатора 6 на величину А X.
В момент времени t, когда в результате перемещения телекопа 1 исследуемый объект 33 окажется в центре видеоконтрольного устройства 11, оператор отпускает нажатый до этого переключатель 16 или 17, по сигналу которого срабатывает генератор 18 одиночных импульсов, однократный сигнал ко-.
торого переводит триггер 19 в состояние «I.,
Измеренный преобразователем 5 код
положения каретки 4 через открытый эле мент И 21 поступает в регистр 22, где да, лее хранится. В этот же момент времени в вычислительное устройство 12 через открытый элемент И 8 поступает код, пропорциональный ДХ. Он образуется из аналогового сигнала на выходе фотоэлектрического анализатора 6, величина которого пропорциональна АХ, в результате преобразования в преобразователе 13. Фильтр 14 настроен на пропускание низкочастотного полезного сигнала и не пропускает высокочастотные сигналы помехи с фотоэлектрического анализатора 6, образующиеся в результате быстро меняющихся составляющих рассогласования между положением телескопа и изображением звезды 32.
После момента времени t привод 3 каретки 4 управляется по сигналу рассогласо0 вания:
Е Х +АХ -Xft, гдеХ,-код положения каретки 4 в момент
tn, хранящийся в регистре 22; Х-и,- код текущего положения каретки ,на выходе преобразователя 5.
Таким образом, код, пропорциональный Е, образуется на выходе сумматора 23, пройдя через открытый элемент И 20, преобразуется в аналоговый сигнал в цреобразователь 25 и через элемент И 8 поступает на 0 вход привода 3, который перемещает каретку таким образом, чтобы сигнал Е стремился к нулю.
Следовательно, каретка 4 после окончания переходных процессов устанавливается в положение, которое она занимала в момент t, скорректированное на величину АХ, так как после окончания движения каретки 4 привод 2, отрабагывая сигнал АХ, и телескоп 1 находятся в положении, при котором изображение звезды- 32 находится в оптическом центре фотоэлектрического анализатора 6. Пороговое устройство 10 контролирует величину сигнала Е и в том случае, когда , где S - некоторая малая величина, близкая к нулю, формирует на своем выходе сигнал, по которому триггер 19 устанавливается в состояние «О, закрывая элемент И 20. С момента времени, когда исследуемый объект 33 находится на оптической оси телескопа 1 и происходит автоматическое гидирование телескопа 1 по звезде 32 гидирования, обычно начинается процесс экспозиции (регистрация световой информации исследуемого объекта 33. При этом в ряде случаев, например, когда исследуемый объект 33 имеет собственную скорость движения относительно звезд, а также в результате дифференциальных гнутых и других инструментальных ошибок исследуемый объект 33 смешается относительно звезды 32 гидирования. Задача оператора в этом случае заключается в осуществлении полуавтоматической коррекции положения телескопа 1, причем, учитывая то, что в это время идет экспозиция, коррекция должна производиться максимально быстро и с высокой точностью. Это обеспечивается работой системы в описанном выше режиме, причем быстро меняющиеся ошибки положения телескопа отрабатываются автоматически, а медленно изменяющийся уход исследуемого объекта 33 от оптической оси телескопа 1 отрабатывается оператором путем полуавтоматической коррекции положения телескопа 1. Если во время процесса полуавтоматической коррекции звезда 32 исчезает из поля зрения фотоэлектрического анализатора 6 (например, из-за облачности), то коррекция положения каретки 4 прекращается, так как по сигнГалу с блока 15 контроля элемент И 9 закрывается и сигнал управления не поступает на вход привода 3. Предлагаемая система не имеет ограничений по разрешающей способности коррекционных подвижек и обеспечивает их высокое быстродействие и точность. В результате отработки за счет автоматического гйдирования быстро меняющихся ошибок положения телескопа 1 величина «размазывания изображения исследуемого объекта во время экспозиции уменьшается приблизительно в 2-3 раза. Кроме того, точность Предлагаемой системы примерно в 1,5 раза выще известных систем. Указанные обстоятельства позволяют использовать в данной системе преобразовг..ели угол-код на 13-14 двоичных разрядов вместо 19-21 двоичных разрядов, применяемых в известных системах. Формула изобретения Система управления телескопом, содержащая привад, выход которого кийематически связан с телескопом, на котором установлены каретка и фотоэлектрический анализатор, выход которого через фильтр подключен ко входу преобразователя аналог-код, а через блок контроля - к первому входу первого элемента И, второй вход которого соединен с первым выходом формирователя корректирующего сигнала, а выход - со входом второго привода, выход КО: торого через преобразователь угол-код соединен с первым входом формирователя корректирующего сигнала, второй вход которого соединен с выходом вычислительного устройства, отличающаяся тем, что, с целью повыщения точности системы, в ней установлены пороговое устройство и второй элемент И, первый вход которого соединен со вторым выходом формирователя корректирующего сигнала, второй вход - с выходом преобразователя аналог-код, а выход - со вхоД вычислительного устройства, третий вход формирователя корректирующего сигнала через пороговое устройство соединен со своим третьим выходом, вход первого привода соединен с выходом фотоэлектрического анализатора и вторым входом преобразователя угол-код, а выход второго привода кинематически связан с кареткой. Источники информации, принятые во внимание при экспертизе 1.Теория автоматического регулирования. Под ред. В. В. Солодовникова. Книга I, М., «Машиностроение, 1967, с. 54-55, 75-77. 2.Айзерман М. А. Теорид автоматического регулирования. М., «Наука, 1966, с. 46-53. 3.Авторское свидетельство СССР № 405106, кл. G 05 В 23/00, 17.12.71. 4.Патент Японии № 49-8670, кл. 54(7э) СО, . 27.12.65 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |
| Телескоп | 1983 |
|
SU1113769A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |